Bicentric Quadrilateral Central Configurations 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem (For CBSE, ICSE, IAS, NET, NRA 2022)
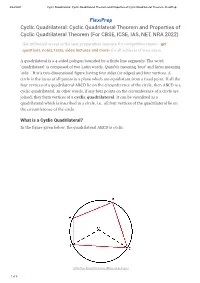
9/22/2021 Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem- FlexiPrep FlexiPrep Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem (For CBSE, ICSE, IAS, NET, NRA 2022) Get unlimited access to the best preparation resource for competitive exams : get questions, notes, tests, video lectures and more- for all subjects of your exam. A quadrilateral is a 4-sided polygon bounded by 4 finite line segments. The word ‘quadrilateral’ is composed of two Latin words, Quadric meaning ‘four’ and latus meaning ‘side’ . It is a two-dimensional figure having four sides (or edges) and four vertices. A circle is the locus of all points in a plane which are equidistant from a fixed point. If all the four vertices of a quadrilateral ABCD lie on the circumference of the circle, then ABCD is a cyclic quadrilateral. In other words, if any four points on the circumference of a circle are joined, they form vertices of a cyclic quadrilateral. It can be visualized as a quadrilateral which is inscribed in a circle, i.e.. all four vertices of the quadrilateral lie on the circumference of the circle. What is a Cyclic Quadrilateral? In the figure given below, the quadrilateral ABCD is cyclic. ©FlexiPrep. Report ©violations @https://tips.fbi.gov/ 1 of 5 9/22/2021 Cyclic Quadrilateral: Cyclic Quadrilateral Theorem and Properties of Cyclic Quadrilateral Theorem- FlexiPrep Let us do an activity. Take a circle and choose any 4 points on the circumference of the circle. Join these points to form a quadrilateral. Now measure the angles formed at the vertices of the cyclic quadrilateral. -

Properties of Equidiagonal Quadrilaterals (2014)
Forum Geometricorum Volume 14 (2014) 129–144. FORUM GEOM ISSN 1534-1178 Properties of Equidiagonal Quadrilaterals Martin Josefsson Abstract. We prove eight necessary and sufficient conditions for a convex quadri- lateral to have congruent diagonals, and one dual connection between equidiag- onal and orthodiagonal quadrilaterals. Quadrilaterals with both congruent and perpendicular diagonals are also discussed, including a proposal for what they may be called and how to calculate their area in several ways. Finally we derive a cubic equation for calculating the lengths of the congruent diagonals. 1. Introduction One class of quadrilaterals that have received little interest in the geometrical literature are the equidiagonal quadrilaterals. They are defined to be quadrilat- erals with congruent diagonals. Three well known special cases of them are the isosceles trapezoid, the rectangle and the square, but there are other as well. Fur- thermore, there exists many equidiagonal quadrilaterals that besides congruent di- agonals have no special properties. Take any convex quadrilateral ABCD and move the vertex D along the line BD into a position D such that AC = BD. Then ABCD is an equidiagonal quadrilateral (see Figure 1). C D D A B Figure 1. An equidiagonal quadrilateral ABCD Before we begin to study equidiagonal quadrilaterals, let us define our notations. In a convex quadrilateral ABCD, the sides are labeled a = AB, b = BC, c = CD and d = DA, and the diagonals are p = AC and q = BD. We use θ for the angle between the diagonals. The line segments connecting the midpoints of opposite sides of a quadrilateral are called the bimedians and are denoted m and n, where m connects the midpoints of the sides a and c. -

ON a PROOF of the TREE CONJECTURE for TRIANGLE TILING BILLIARDS Olga Paris-Romaskevich
ON A PROOF OF THE TREE CONJECTURE FOR TRIANGLE TILING BILLIARDS Olga Paris-Romaskevich To cite this version: Olga Paris-Romaskevich. ON A PROOF OF THE TREE CONJECTURE FOR TRIANGLE TILING BILLIARDS. 2019. hal-02169195v1 HAL Id: hal-02169195 https://hal.archives-ouvertes.fr/hal-02169195v1 Preprint submitted on 30 Jun 2019 (v1), last revised 8 Oct 2019 (v3) HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. ON A PROOF OF THE TREE CONJECTURE FOR TRIANGLE TILING BILLIARDS. OLGA PARIS-ROMASKEVICH To Manya and Katya, to the moments we shared around mathematics on one winter day in Moscow. Abstract. Tiling billiards model a movement of light in heterogeneous medium consisting of homogeneous cells in which the coefficient of refraction between two cells is equal to −1. The dynamics of such billiards depends strongly on the form of an underlying tiling. In this work we consider periodic tilings by triangles (and cyclic quadrilaterals), and define natural foliations associated to tiling billiards in these tilings. By studying these foliations we manage to prove the Tree Conjecture for triangle tiling billiards that was stated in the work by Baird-Smith, Davis, Fromm and Iyer, as well as its generalization that we call Density property. -

Downloaded from Bookstore.Ams.Org 30-60-90 Triangle, 190, 233 36-72
Index 30-60-90 triangle, 190, 233 intersects interior of a side, 144 36-72-72 triangle, 226 to the base of an isosceles triangle, 145 360 theorem, 96, 97 to the hypotenuse, 144 45-45-90 triangle, 190, 233 to the longest side, 144 60-60-60 triangle, 189 Amtrak model, 29 and (logical conjunction), 385 AA congruence theorem for asymptotic angle, 83 triangles, 353 acute, 88 AA similarity theorem, 216 included between two sides, 104 AAA congruence theorem in hyperbolic inscribed in a semicircle, 257 geometry, 338 inscribed in an arc, 257 AAA construction theorem, 191 obtuse, 88 AAASA congruence, 197, 354 of a polygon, 156 AAS congruence theorem, 119 of a triangle, 103 AASAS congruence, 179 of an asymptotic triangle, 351 ABCD property of rigid motions, 441 on a side of a line, 149 absolute value, 434 opposite a side, 104 acute angle, 88 proper, 84 acute triangle, 105 right, 88 adapted coordinate function, 72 straight, 84 adjacency lemma, 98 zero, 84 adjacent angles, 90, 91 angle addition theorem, 90 adjacent edges of a polygon, 156 angle bisector, 100, 147 adjacent interior angle, 113 angle bisector concurrence theorem, 268 admissible decomposition, 201 angle bisector proportion theorem, 219 algebraic number, 317 angle bisector theorem, 147 all-or-nothing theorem, 333 converse, 149 alternate interior angles, 150 angle construction theorem, 88 alternate interior angles postulate, 323 angle criterion for convexity, 160 alternate interior angles theorem, 150 angle measure, 54, 85 converse, 185, 323 between two lines, 357 altitude concurrence theorem, -

Circle and Cyclic Quadrilaterals
Circle and Cyclic Quadrilaterals MARIUS GHERGU School of Mathematics and Statistics University College Dublin 33 Basic Facts About Circles A central angle is an angle whose vertex is at the center of ² the circle. It measure is equal the measure of the intercepted arc. An angle whose vertex lies on the circle and legs intersect the ² cirlc is called inscribed in the circle. Its measure equals half length of the subtended arc of the circle. AOC= contral angle, AOC ÙAC \ \ Æ ABC=inscribed angle, ABC ÙAC \ \ Æ 2 A line that has exactly one common point with a circle is ² called tangent to the circle. 44 The tangent at a point A on a circle of is perpendicular to ² the diameter passing through A. OA AB ? Through a point A outside of a circle, exactly two tangent ² lines can be drawn. The two tangent segments drawn from an exterior point to a cricle are equal. OA OB, OBC OAC 90o ¢OAB ¢OBC Æ \ Æ \ Æ Æ) ´ 55 The value of the angle between chord AB and the tangent ² line to the circle that passes through A equals half the length of the arc AB. AC,BC chords CP tangent Æ Æ ÙAC ÙAC ABC , ACP \ Æ 2 \ Æ 2 The line passing through the centres of two tangent circles ² also contains their tangent point. 66 Cyclic Quadrilaterals A convex quadrilateral is called cyclic if its vertices lie on a ² circle. A convex quadrilateral is cyclic if and only if one of the fol- ² lowing equivalent conditions hold: (1) The sum of two opposite angles is 180o; (2) One angle formed by two consecutive sides of the quadri- lateral equal the external angle formed by the other two sides of the quadrilateral; (3) The angle between one side and a diagonal equals the angle between the opposite side and the other diagonal. -
Angles in a Circle and Cyclic Quadrilateral MODULE - 3 Geometry
Angles in a Circle and Cyclic Quadrilateral MODULE - 3 Geometry 16 Notes ANGLES IN A CIRCLE AND CYCLIC QUADRILATERAL You must have measured the angles between two straight lines. Let us now study the angles made by arcs and chords in a circle and a cyclic quadrilateral. OBJECTIVES After studying this lesson, you will be able to • verify that the angle subtended by an arc at the centre is double the angle subtended by it at any point on the remaining part of the circle; • prove that angles in the same segment of a circle are equal; • cite examples of concyclic points; • define cyclic quadrilterals; • prove that sum of the opposite angles of a cyclic quadrilateral is 180o; • use properties of cyclic qudrilateral; • solve problems based on Theorems (proved) and solve other numerical problems based on verified properties; • use results of other theorems in solving problems. EXPECTED BACKGROUND KNOWLEDGE • Angles of a triangle • Arc, chord and circumference of a circle • Quadrilateral and its types Mathematics Secondary Course 395 MODULE - 3 Angles in a Circle and Cyclic Quadrilateral Geometry 16.1 ANGLES IN A CIRCLE Central Angle. The angle made at the centre of a circle by the radii at the end points of an arc (or Notes a chord) is called the central angle or angle subtended by an arc (or chord) at the centre. In Fig. 16.1, ∠POQ is the central angle made by arc PRQ. Fig. 16.1 The length of an arc is closely associated with the central angle subtended by the arc. Let us define the “degree measure” of an arc in terms of the central angle. -

Cyclic Quadrilaterals — the Big Picture Yufei Zhao [email protected]
Winter Camp 2009 Cyclic Quadrilaterals Yufei Zhao Cyclic Quadrilaterals | The Big Picture Yufei Zhao [email protected] An important skill of an olympiad geometer is being able to recognize known configurations. Indeed, many geometry problems are built on a few common themes. In this lecture, we will explore one such configuration. 1 What Do These Problems Have in Common? 1. (IMO 1985) A circle with center O passes through the vertices A and C of triangle ABC and intersects segments AB and BC again at distinct points K and N, respectively. The circumcircles of triangles ABC and KBN intersects at exactly two distinct points B and M. ◦ Prove that \OMB = 90 . B M N K O A C 2. (Russia 1995; Romanian TST 1996; Iran 1997) Consider a circle with diameter AB and center O, and let C and D be two points on this circle. The line CD meets the line AB at a point M satisfying MB < MA and MD < MC. Let K be the point of intersection (different from ◦ O) of the circumcircles of triangles AOC and DOB. Show that \MKO = 90 . C D K M A O B 3. (USA TST 2007) Triangle ABC is inscribed in circle !. The tangent lines to ! at B and C meet at T . Point S lies on ray BC such that AS ? AT . Points B1 and C1 lies on ray ST (with C1 in between B1 and S) such that B1T = BT = C1T . Prove that triangles ABC and AB1C1 are similar to each other. 1 Winter Camp 2009 Cyclic Quadrilaterals Yufei Zhao A B S C C1 B1 T Although these geometric configurations may seem very different at first sight, they are actually very related. -

Cyclic Quadrilaterals
GI_PAGES19-42 3/13/03 7:02 PM Page 1 Cyclic Quadrilaterals Definition: Cyclic quadrilateral—a quadrilateral inscribed in a circle (Figure 1). Construct and Investigate: 1. Construct a circle on the Voyage™ 200 with Cabri screen, and label its center O. Using the Polygon tool, construct quadrilateral ABCD where A, B, C, and D are on circle O. By the definition given Figure 1 above, ABCD is a cyclic quadrilateral (Figure 1). Cyclic quadrilaterals have many interesting and surprising properties. Use the Voyage 200 with Cabri tools to investigate the properties of cyclic quadrilateral ABCD. See whether you can discover several relationships that appear to be true regardless of the size of the circle or the location of A, B, C, and D on the circle. 2. Measure the lengths of the sides and diagonals of quadrilateral ABCD. See whether you can discover a relationship that is always true of these six measurements for all cyclic quadrilaterals. This relationship has been known for 1800 years and is called Ptolemy’s Theorem after Alexandrian mathematician Claudius Ptolemaeus (A.D. 85 to 165). 3. Determine which quadrilaterals from the quadrilateral hierarchy can be cyclic quadrilaterals (Figure 2). 4. Over 1300 years ago, the Hindu mathematician Brahmagupta discovered that the area of a cyclic Figure 2 quadrilateral can be determined by the formula: A = (s – a)(s – b)(s – c)(s – d) where a, b, c, and d are the lengths of the sides of the a + b + c + d quadrilateral and s is the semiperimeter given by s = 2 . Using cyclic quadrilaterals, verify these relationships. -

Cyclic and Bicentric Quadrilaterals G
Cyclic and Bicentric Quadrilaterals G. T. Springer Email: [email protected] Hewlett-Packard Calculators and Educational Software Abstract. In this hands-on workshop, participants will use the HP Prime graphing calculator and its dynamic geometry app to explore some of the many properties of cyclic and bicentric quadrilaterals. The workshop will start with a brief introduction to the HP Prime and an overview of its features to get novice participants oriented. Participants will then use ready-to-hand constructions of cyclic and bicentric quadrilaterals to explore. Part 1: Cyclic Quadrilaterals The instructor will send you an HP Prime app called CyclicQuad for this part of the activity. A cyclic quadrilateral is a convex quadrilateral that has a circumscribed circle. 1. Press ! to open the App Library and select the CyclicQuad app. The construction consists DEGH, a cyclic quadrilateral circumscribed by circle A. 2. Tap and drag any of the points D, E, G, or H to change the quadrilateral. Which of the following can DEGH never be? • Square • Rhombus (non-square) • Rectangle (non-square) • Parallelogram (non-rhombus) • Isosceles trapezoid • Kite Just move the points of the quadrilateral around enough to convince yourself for each one. Notice HDE and HE are both inscribed angles that subtend the entirety of the circle; ≮ ≮ likewise with DHG and DEG. This leads us to a defining characteristic of cyclic ≮ ≮ quadrilaterals. Make a conjecture. A quadrilateral is cyclic if and only if… 3. Make DEGH into a kite, similar to that shown to the right. Tap segment HE and press E to select it. Now use U and D to move the diagonal vertically. -

Fun Problems in Geometry and Beyond
Symmetry, Integrability and Geometry: Methods and Applications SIGMA 15 (2019), 097, 21 pages Fun Problems in Geometry and Beyond Boris KHESIN †y and Serge TABACHNIKOV ‡z †y Department of Mathematics, University of Toronto, Toronto, ON M5S 2E4, Canada E-mail: [email protected] URL: http://www.math.toronto.edu/khesin/ ‡z Department of Mathematics, Pennsylvania State University, University Park, PA 16802, USA E-mail: [email protected] URL: http://www.personal.psu.edu/sot2/ Received November 17, 2019; Published online December 11, 2019 https://doi.org/10.3842/SIGMA.2019.097 Abstract. We discuss fun problems, vaguely related to notions and theorems of a course in differential geometry. This paper can be regarded as a weekend “treasure\treasure chest”chest" supplemen- ting the course weekday lecture notes. The problems and solutions are not original, while their relation to the course might be so. Key words: clocks; spot it!; hunters; parking; frames; tangents; algebra; geometry 2010 Mathematics Subject Classification: 00A08; 00A09 To Dmitry Borisovich Fuchs on the occasion of his 80th anniversary Áîëüøå çàäà÷, õîðîøèõ è ðàçíûõ! attributed to Winston Churchill (1918) This is a belated birthday present to Dmitry Borisovich Fuchs, a mathematician young at 1 heart.1 Many of these problems belong to the mathematical folklore. We did not attempt to trace them back to their origins (which might be impossible anyway), and the given references are not necessarily the first mentioning of these problems. 1 Problems 1. AA wall wall clock clock has has the the minute minute and and hour hour hands hands of of equal equal length. -

A Condition That a Tangential Quadrilateral Is Also Achordalone
View metadata, citation and similar papers at core.ac.uk brought to you by CORE Mathematical Communications 12(2007), 33-52 33 A condition that a tangential quadrilateral is also achordalone Mirko Radic´,∗ Zoran Kaliman† and Vladimir Kadum‡ Abstract. In this article we present a condition that a tangential quadrilateral is also a chordal one. The main result is given by Theo- rem 1 and Theorem 2. Key words: tangential quadrilateral, bicentric quadrilateral AMS subject classifications: 51E12 Received September 1, 2005 Accepted March 9, 2007 1. Introduction A polygon which is both tangential and chordal will be called a bicentric polygon. The following notation will be used. If A1A2A3A4 is a considered bicentric quadrilateral, then its incircle is denoted by C1, circumcircle by C2,radiusofC1 by r,radiusofC2 by R, center of C1 by I, center of C2 by O, distance between I and O by d. A2 C2 C1 r A d 1 O I R A3 A4 Figure 1.1 ∗Faculty of Philosophy, University of Rijeka, Omladinska 14, HR-51 000 Rijeka, Croatia, e-mail: [email protected] †Faculty of Philosophy, University of Rijeka, Omladinska 14, HR-51 000 Rijeka, Croatia, e-mail: [email protected] ‡University “Juraj Dobrila” of Pula, Preradovi´ceva 1, HR-52 100 Pula, Croatia, e-mail: [email protected] 34 M. Radic,´ Z. Kaliman and V. Kadum The first one who was concerned with bicentric quadrilaterals was a German mathematicianNicolaus Fuss (1755-1826), see [2]. He foundthat C1 is the incircle and C2 the circumcircle of a bicentric quadrilateral A1A2A3A4 iff (R2 − d2)2 =2r2(R2 + d2). -
Angle Bisectors in a Quadrilateral Are Concurrent
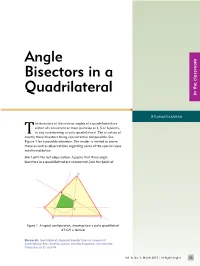
Angle Bisectors in a Quadrilateral in the classroom A Ramachandran he bisectors of the interior angles of a quadrilateral are either all concurrent or meet pairwise at 4, 5 or 6 points, in any case forming a cyclic quadrilateral. The situation of exactly three bisectors being concurrent is not possible. See Figure 1 for a possible situation. The reader is invited to prove these as well as observations regarding some of the special cases mentioned below. Start with the last observation. Assume that three angle bisectors in a quadrilateral are concurrent. Join the point of T D E H A F G B C Figure 1. A typical configuration, showing how a cyclic quadrilateral is formed Keywords: Quadrilateral, diagonal, angular bisector, tangential quadrilateral, kite, rhombus, square, isosceles trapezium, non-isosceles trapezium, cyclic, incircle 33 At Right Angles | Vol. 4, No. 1, March 2015 Vol. 4, No. 1, March 2015 | At Right Angles 33 D A D A D D E G A A F H G I H F F G E H B C E Figure 3. If is a parallelogram, then is a B C B C rectangle B C Figure 2. A tangential quadrilateral Figure 6. The case when is a non-isosceles trapezium: the result is that is a cyclic Figure 7. The case when has but A D quadrilateral in which : the result is that is an isosceles ∘ trapezium ( and ∠ ) E ∠ ∠ ∠ ∠ concurrence to the fourth vertex. Prove that this line indeed bisects the angle at the fourth vertex. F H Tangential quadrilateral A quadrilateral in which all the four angle bisectors G meet at a pointincircle is a — one which has an circle touching all the four sides.