SMALL WTND—POWERED ELECTRIC GENERATORS and SYSTEMS Vassilis Clitou Nicodemou, M.Sc. (Eng.) July 1979 a Thesis Submitted
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Axial Field Permanent Magnet Machines with High Overload Capability for Transient Actuation Applications
THE UNIVERSITY OF SHEFFIELD Axial field permanent magnet machines with high overload capability for transient actuation applications By Jiangnan Gong A Thesis submitted for the degree of Doctor of Philosophy Department of Electronic and Electrical Engineering The University of Sheffield. JANUARY 2018 ABSTRACT This thesis describes the design, construction and testing of an axial field permanent magnet machine for an aero-engine variable guide vane actuation system. The electrical machine is used in combination with a leadscrew unit that results in a minimum torque specification of 50Nm up to a maximum speed of 500rpm. The combination of the geometry of the space envelope available and the modest maximum speed lends itself to the consideration of an axial field permanent magnet machines. The relative merits of three topologies of double-sided permanent magnet axial field machines are discussed, viz. a slotless toroidal wound machine, a slotted toroidal machine and a yokeless axial field machine with separate tooth modules. Representative designs are established and analysed with three-dimensional finite element method, each of these 3 topologies are established on the basis of a transient winding current density of 30A/mm2. Having established three designs and compared their performance at the rated 50Nm point, further overload capability is compared in which the merits of the slotless machine is illustrated. Specifically, this type of axial field machine retains a linear torque versus current characteristic up to higher torques than the other two topologies, which are increasingly affected by magnetic saturation. Having selected a slotless machine as the preferred design, further design optimization was performed, including detailed assessment of transient performance. -

PLL Approach to Mitigate Symmetrical Faults in Weak AC Grid of DFIG Based Wind Turbine for Voltage Stability Analysis
International Journal of Electrical Electronics & Computer Science Engineering Volume 5, Issue 2 (April, 2018) | E-ISSN : 2348-2273 | P-ISSN : 2454-1222 Available Online at www.ijeecse.com PLL Approach to Mitigate Symmetrical Faults in Weak AC Grid of DFIG Based Wind Turbine for Voltage Stability Analysis Cholleti Sriram1, O. Rakesh2, M. Harish3, A. Sridhar4 1Assistant Professor, 2-4UG Scholars, EEE Department, Guru Nanak Institute of Technology, Hyderabad, India [email protected], [email protected] Abstract: Study of Instability issues of the grid-connected of wind turbines (WTs) based on doubly fed induction doubly fed induction generator (DFIG) based wind turbines generators (DFIG) that intends to improve its low- (WTs) during low-voltage ride-through (LVRT) have got voltage ride through(LVRT) capability. The main little attention yet. In this paper, the small-signal behavior of objective of this work is to design an algorithm that DFIG WTs attached to weak AC grid with high impedances would enable the system to control the initial over during the period of LVRT is investigated, with special attention paid to the rotor-side converter (RSC). Firstly, currents that appear in the generator during voltage based on the studied LVRT strategy, the influence of the sags, which can damage the RSC, without tripping it. high-impedance grid is summarized as the interaction As a difference with classical solutions, based on the between phase-looked loop (PLL) and rotor current installation of crowbar circuits, this operation mode controller (RCC). As modal analysis result indicates that the permits to keep the inverter connected to the generator, underdamped poles are dominated by PLL, complex torque something that would permit the injection of power to coefficient method (CTCM), which is conventionally applied the grid during the fault, as the new grid codes demand. -

Doubly Fed Induction Motor
© 2018 JETIR April 2018, Volume 5, Issue 4 www.jetir.org (ISSN-2349-5162) Doubly fed induction motor For speed control of motor 1 2 3 4 Rushikesh pandya , Hingrajiya jaydeep , Goswami rajan , Nandaniya hiral Sarvaiya kinjal5, 1 Assistant Professor 2, 3, 4, 5, students 1, 2, 3, 4, 5, Department of Electrical engineering Dr Subhash technical campus, junagadh, Gujarat, India Abstract—Doubly-fed electric machines are electric motors or electric generators where both the field magnet windings and armature windings are separately connected to equipment outside the machine. This is useful, for instance, for generators used in wind turbines. By feeding adjustable frequency AC power to the field windings, the magnetic field can be made to rotate, allowing variation in motor or generator speed. Index Terms—doubly fed induction motor, speed control, different regulator _____________________________________________________________________________________________________ I. INTRODUCTION a three-phase wound-rotor induction machine operates as a synchronous speed nS obtained during normal singly-fed synchronous machine when ac currents are fed into one set of operation. This is illustrated in Figure 8a. In this case, the windings and dc current is fed into the other set of windings. When resulting synchronous speed of the doubly-fed induction motor ac currents are fed into both the stator and rotor windings of a is equal to: three-phase wound-rotor induction machine, the machine also operates as a synchronous machine. In this situation, when the nS (DF) 120 × (fStator — fRotor) wound-rotor induction machine operates as a synchronous motor, it = is referred to as a doubly-fed induction motor since electrical NPoSe power from the power network is converted into mechanical power available at the machine shaft via both the stator and rotor Where nS (DF) is the synchronous speed of the windings of the machine. -

Rotating DC Motors Part I
Rotating DC Motors Part I The previous lesson introduced the simple linear motor. Linear motors have some practical applications, but rotating DC motors are much more prolific. The principles which explain the operation of linear motors are the same as those which explain the operation of practical DC motors. The fundamental difference between linear motors and practical DC motors is that DC motors rotate rather than move in a straight line. The same forces that cause a linear motor to move “right or left” in a straight line cause the DC motor to rotate. This chapter will examine how the linear motor principles can be used to make a practical DC motor spin. 16.1 Electrical machinery Before discussing the DC motor, this section will briefly introduce the parts of an electrical machine. But first, what is an electrical machine? An electrical machine is a term which collectively refers to motors and generators, both of which can be designed to operate using AC (Alternating Current) power or DC power. In this supplement we are only looking at DC motors, but these terms will also apply to the other electrical machines. 16.1.1 Physical parts of an electrical machine It should be apparent that the purpose of an electrical motor is to convert electrical power into mechanical power. Practical DC motors do this by using direct current electrical power to make a shaft spin. The mechanical power available from the spinning shaft of the DC motor can be used to perform some useful work such as turn a fan, spin a CD, or raise a car window. -

The Design of Turbo Field Magnets for Alternate-Current Generators with Special Reference to Large Units at High Speeds
1910.] WALKER: DESIGN OF TURBO FIELD MAGNETS. 319 THE DESIGN OF TURBO FIELD MAGNETS FOR ALTERNATE-CURRENT GENERATORS WITH SPECIAL REFERENCE TO LARGE UNITS AT HIGH SPEEDS. By MILES WALKER, Member. (Paper received November 10, 1909, and read in London on March 10, 1910.) SUMMARY. This paper re-opens the controversy, between the salient pole type of field magnet and the cylindrical type. Reasons are given why the latter type is better suited for obtaining the greatest possible output from a given diameter. The methods adopted by various makers of supporting the windings are described, and the possible limits of output considered. THE NECESSITY OF PROVIDING LARGE GENERATING UNITS OF HIGH SPEED. In the discussion which followed the paper by Dr. Kloss, " Practical Considerations in the Selection of Turbo Alternators," before the Manchester Section of the Institution of Electrical Engineers in November, 1908, an argument arose as to whether the field magnets of turbo-generators should be made with salient poles or should be of the cylindrical type with a distributed winding. Some difference of opinion exists among designers on this point, and each method has been adopted in quite a large number of successful turbo-generators. In the opinion of the author the matter is one of great importance, because, in the future, makers of turbo-generators will be called upon to build machines of larger capacity than ever before contemplated, and the makers of steam turbines to drive them will call for extremely high speeds, so that the turbo-generator of the future will have to be capable of giving an extremely large output from a diameter which is not excessive, and will have to be constructed in a manner which permits of a high factor of safety. -

How Electric Motors Work by Marshall Brain Introduction to How Electric Motors Work
How Electric Motors Work by Marshall Brain Introduction to How Electric Motors Work Electric motors are everywhere! In your house, almost every mechanical movement that you see around you is caused by an AC (alternating current) or DC (direct current) electric motor. A simple motor has six parts:Armature or rotor, Commutator, Brushes, Axle, Field magnet, DC power supply of some sort By understanding how a motor works you can learn a lot about magnets, electromagnets and electricity in general. In this article, you will learn what makes electric motors tick. Inside an Electric Motor An electric motor is all about magnets and magnetism: A motor uses magnets to create motion. If you have ever played with magnets you know about the fundamental law of all magnets: Opposites attract and likes repel. So if you have two bar magnets with their ends marked "north" and "south," then the north end of one magnet will attract the south end of the other. On the other hand, the north end of one magnet will repel the north end of the other (and similarly, south will repel south). Inside an electric motor, these attracting and repelling forces create rotational motion. In the above diagram, you can see two magnets in the motor: The armature (or rotor) is an electromagnet, while the field magnet is a permanent magnet (the field magnet could be anelectromagnet as well, but in most small motors it isn't in order to save power). Toy Motor The motor being dissected here is a simple electric motor that you would typically find in a toy. -
GCSE Physics Edexcel Physics Magnetism, the Motor Effect And
The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club XL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club -

High Magnetic Fields for Fundamental Physics
High magnetic fields for fundamental physics R´emy Battesti,1 Jerome Beard,1 Sebastian B¨oser,2 Nicolas Bruyant,1 Dmitry Budker,2, 3, 4, 5, ∗ Scott A. Crooker,6 Edward J. Daw,7 Victor V. Flambaum,2, 3, 8 Toshiaki Inada,9 Igor G. Irastorza,10 Felix Karbstein,11, 12 Dong Lak Kim,13 Mikhail G. Kozlov,14, 15 Ziad Melhem,16 Arran Phipps,17 Pierre Pugnat,18 Geert Rikken,1, y Carlo Rizzo,1, z Matthias Schott,2 Yannis K. Semertzidis,13, 19 Herman H. J. ten Kate,20 and Guido Zavattini21 1Laboratoire National des Champs Magn´etiquesIntenses (UPR 3228, CNRS-UPS-UGA-INSA), F-31400 Toulouse Cedex, France 2Johannes Gutenberg University, 55099 Mainz, Germany 3Helmholtz Institute Mainz, 55099 Mainz, Germany 4Department of Physics, University of California, Berkeley, Berkeley, California 94720- 7300, USA 5Nuclear Science Division, Lawrence Berkeley National Laboratory, Berkeley, California 94720-7300, USA 6National High Magnetic Field Laboratory, Los Alamos, New Mexico 87545, USA 7Department of Physics and Astronomy, The University of Sheffield, Hicks Building, Hounsfield Road, Sheffield S3 7RH, United Kingdom 8School of Physics, University of New South Wales, Sydney, New South Wales 2052, Australia 9International Center for Elementary Particle Physics, The University of Tokyo, 7-3-1 Hongo, Bunkyo, Tokyo 113-0033, Japan 10Grupo de Fisica Nuclear y Astroparticulas. Departamento de Fisica Teorica. Universidad de Zaragoza, 50009 Zaragoza, Spain 11Helmholtz-Institut Jena, Fr¨obelstieg 3, 07743 Jena, Germany 12Theoretisch-Physikalisches Institut, Abbe Center of Photonics, Friedrich-Schiller-Universit¨atJena, Max-Wien-Platz 1, 07743 Jena, Germany 13Center for Axion and Precision Physics Research, IBS, Daejeon 34051, Republic of Korea 14Petersburg Nuclear Physics Institute of NRC \Kurchatov Institute", Gatchina 188300, Russia 15St. -

Unit 3 Electric Motors
Unit 3 Electric motors Vocabulary Match the words with their Polish equivalents. 1. armature a) cewka, zezwój 2. axle b) wirnik 3. coil c) bocznik 4. field winding d) uzwojenie wzbudzające 5. induced voltage e) wał 6. permanent magnet f) moment obrotowy 7. resistor g) stojan 8. rotor h) napięcie indukowane 9. shaft i) twornik 10. shunt j) magnes trwały 11. stator k) uzwojenie 12. torque l) oś 13. winding m) opornik Lead-in In groups list applications of electric motors in common household. Electric motors quiz 1. The basis of an electric motor is: a) a spark plug b) magnets c) a battery 2. A motor's motion comes from which property of magnets? a) Like poles repel each other. b) Opposite poles attract each other. c) both A and B 3. The six basic parts of a simple two-pole motor are: a) the armature, the commutator, the brushes, the axle, a field magnet and a DC power supply b) the armature, the brushes, the battery, the axle, the anchor and a field magnet c) the commutator, the brushes, the casing, a DC power supply and the wires 4. A motor's armature acts as: a) a rotor b) an anchor c) an axle 5. When a small motor turns on, the armature spins because of: a) gravity b) magnetism c) inertia By Justyna Plezia and Magdalena Potręć (AGH UST) 1 For classroom use at AGH UST . You can distribute the copies in paper and electronic form among fellow teachers and second cycle students at AGH UST only. -
Solenoids, Electromagnets and Electromagnetic Windings
This is a reproduction of a library book that was digitized by Google as part of an ongoing effort to preserve the information in books and make it universally accessible. https://books.google.com Solenoids,electromagnetsandelectro-magneticwindings... CharlesReginaldUnderhill .<rw\ , M tit nc>o SOLENOIDS ELECTROMAGNETS AND ELECTROMAGNETIC WINDINGS BY CHARLES R: UNDERHILL CONSULTINg ELECTRICaL ENgINEER aSSOCIaTE MEMBER aMERICaN INSTITUTE OF ELECTRICaL ENgINEERS 223 ILLUSTRATIONS NEW YORK D. VAN NOSTRAND COMPANY 1910 COPYRIGHT, 1910, BY D. VAN NOSTRAND COMPANY. PREFACE Since nearly all of the phenomena met with in elec trical engineering in connection with the relations between electricity and magnetism are involved in the action of electromagnets, it is readily recognized that a careful study of this branch of design is necessary in order to predetermine any specific action. With the rapid development of remote electrical con trol, and kindred electro-mechanical devices wherein the electromagnet is the basis of the system, the want of accurate data regarding the design of electromagnets has long been felt. With a view to expanding the knowledge regarding the action of solenoids and electromagnets, the author made numerous tests covering a long period, by means of which data he has deduced laws, some of which have been published in the form of articles which appeared in the technical journals. In this volume the author has endeavored to describe the evolution of the solenoid and various other types of electromagnets in as perfectly connected a manner as possible. In view of the meager data hitherto obtainable it is believed that this book will be welcomed, not only by the electrical profession in general, but by the manu facturer of electrical apparatus as well. -

(12) United States Patent (10) Patent No.: US 7,359,166 B2 Skauen (45) Date of Patent: Apr
USOO7359166B2 (12) United States Patent (10) Patent No.: US 7,359,166 B2 Skauen (45) Date of Patent: Apr. 15, 2008 (54) METHOD AND CONTROL SYSTEM FOR 5,128,500 A * 7/1992 Hirschfeld .................. 2OOfS R CONTROLLING ELECTRIC MOTORS 5,189,412 A * 2/1993 Mehta et al. .......... 340/825.22 5,661,625 A * 8/1997 Yang ........................... 361.92 (75) Inventor: Ronny Skauen, Gressvik (NO) 6,169,648 B1* 1/2001 Denvir et al. ................. 361.25 6,234,100 B1* 5/2001 Fadeley et al. ......... 114/144 R (73) Assignee: Sleipner Motor AS, Fredrikstad (NO) 6,570,272 B2 * 5/2003 Dickhoff..................... 307 113 (*) Notice: Subject to any disclaimer,- 0 the term of this (Continued) patent is extended or adjusted under 35 FOREIGN PATENT DOCUMENTS U.S.C. 154(b) by 493 days. EP O 651 489 5, 1995 (21) Appl. No.: 10/618,265 (Continued) (22) Filed: Jul. 11, 2003 Primary Examiner Michael Sherry Assistant Examiner—Ann T. Hoang (65) Prior Publication Data (74) Attorney, Agent, or Firm—Lipsitz & McAllister LLC US 2004/OO85695A1 May 6, 2004 (57) ABSTRACT (30) Foreign Application Priority Data There is described a method for controlling an electric motor comprising an operating relay having relay windings with Oct. 30, 2002 (NO) ................................. 2002 52O7 respective first and second relay contacts and a control (51) Int. Cl. means, which motor via current conductors is connected to HO2H 7/08 (2006.01) said relay and a power source wherein an operator by using (52) U.S. Cl. ........................................................ 361A23 said control means controls the application of current to the (58) Field of Classification Search ................. -
Lecture 27: Doubly Fed Induction Motors
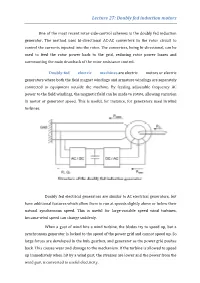
Lecture 27: Doubly fed induction motors One of the most recent rotor-side-control schemes is the doubly fed induction generator. The method uses bi-directional AC-AC converters in the rotor circuit to control the currents injected into the rotor. The converters, being bi-directional, can be used to feed the rotor power back to the grid, reducing rotor power losses and surmounting the main drawback of the rotor resistance control. Doubly-fed electric machines are electric motors or electric generators where both the field magnet windings and armature windings are separately connected to equipment outside the machine. By feeding adjustable frequency AC power to the field windings, the magnetic field can be made to rotate, allowing variation in motor or generator speed. This is useful, for instance, for generators used in wind turbines. Doubly fed electrical generators are similar to AC electrical generators, but have additional features which allow them to run at speeds slightly above or below their natural synchronous speed. This is useful for large variable speed wind turbines, because wind speed can change suddenly. When a gust of wind hits a wind turbine, the blades try to speed up, but a synchronous generator is locked to the speed of the power grid and cannot speed up. So large forces are developed in the hub, gearbox, and generator as the power grid pushes back. This causes wear and damage to the mechanism. If the turbine is allowed to speed up immediately when hit by a wind gust, the stresses are lower and the power from the wind gust is converted to useful electricity.