Physics Chap 13
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Axial Field Permanent Magnet Machines with High Overload Capability for Transient Actuation Applications
THE UNIVERSITY OF SHEFFIELD Axial field permanent magnet machines with high overload capability for transient actuation applications By Jiangnan Gong A Thesis submitted for the degree of Doctor of Philosophy Department of Electronic and Electrical Engineering The University of Sheffield. JANUARY 2018 ABSTRACT This thesis describes the design, construction and testing of an axial field permanent magnet machine for an aero-engine variable guide vane actuation system. The electrical machine is used in combination with a leadscrew unit that results in a minimum torque specification of 50Nm up to a maximum speed of 500rpm. The combination of the geometry of the space envelope available and the modest maximum speed lends itself to the consideration of an axial field permanent magnet machines. The relative merits of three topologies of double-sided permanent magnet axial field machines are discussed, viz. a slotless toroidal wound machine, a slotted toroidal machine and a yokeless axial field machine with separate tooth modules. Representative designs are established and analysed with three-dimensional finite element method, each of these 3 topologies are established on the basis of a transient winding current density of 30A/mm2. Having established three designs and compared their performance at the rated 50Nm point, further overload capability is compared in which the merits of the slotless machine is illustrated. Specifically, this type of axial field machine retains a linear torque versus current characteristic up to higher torques than the other two topologies, which are increasingly affected by magnetic saturation. Having selected a slotless machine as the preferred design, further design optimization was performed, including detailed assessment of transient performance. -

PLL Approach to Mitigate Symmetrical Faults in Weak AC Grid of DFIG Based Wind Turbine for Voltage Stability Analysis
International Journal of Electrical Electronics & Computer Science Engineering Volume 5, Issue 2 (April, 2018) | E-ISSN : 2348-2273 | P-ISSN : 2454-1222 Available Online at www.ijeecse.com PLL Approach to Mitigate Symmetrical Faults in Weak AC Grid of DFIG Based Wind Turbine for Voltage Stability Analysis Cholleti Sriram1, O. Rakesh2, M. Harish3, A. Sridhar4 1Assistant Professor, 2-4UG Scholars, EEE Department, Guru Nanak Institute of Technology, Hyderabad, India [email protected], [email protected] Abstract: Study of Instability issues of the grid-connected of wind turbines (WTs) based on doubly fed induction doubly fed induction generator (DFIG) based wind turbines generators (DFIG) that intends to improve its low- (WTs) during low-voltage ride-through (LVRT) have got voltage ride through(LVRT) capability. The main little attention yet. In this paper, the small-signal behavior of objective of this work is to design an algorithm that DFIG WTs attached to weak AC grid with high impedances would enable the system to control the initial over during the period of LVRT is investigated, with special attention paid to the rotor-side converter (RSC). Firstly, currents that appear in the generator during voltage based on the studied LVRT strategy, the influence of the sags, which can damage the RSC, without tripping it. high-impedance grid is summarized as the interaction As a difference with classical solutions, based on the between phase-looked loop (PLL) and rotor current installation of crowbar circuits, this operation mode controller (RCC). As modal analysis result indicates that the permits to keep the inverter connected to the generator, underdamped poles are dominated by PLL, complex torque something that would permit the injection of power to coefficient method (CTCM), which is conventionally applied the grid during the fault, as the new grid codes demand. -

Doubly Fed Induction Motor
© 2018 JETIR April 2018, Volume 5, Issue 4 www.jetir.org (ISSN-2349-5162) Doubly fed induction motor For speed control of motor 1 2 3 4 Rushikesh pandya , Hingrajiya jaydeep , Goswami rajan , Nandaniya hiral Sarvaiya kinjal5, 1 Assistant Professor 2, 3, 4, 5, students 1, 2, 3, 4, 5, Department of Electrical engineering Dr Subhash technical campus, junagadh, Gujarat, India Abstract—Doubly-fed electric machines are electric motors or electric generators where both the field magnet windings and armature windings are separately connected to equipment outside the machine. This is useful, for instance, for generators used in wind turbines. By feeding adjustable frequency AC power to the field windings, the magnetic field can be made to rotate, allowing variation in motor or generator speed. Index Terms—doubly fed induction motor, speed control, different regulator _____________________________________________________________________________________________________ I. INTRODUCTION a three-phase wound-rotor induction machine operates as a synchronous speed nS obtained during normal singly-fed synchronous machine when ac currents are fed into one set of operation. This is illustrated in Figure 8a. In this case, the windings and dc current is fed into the other set of windings. When resulting synchronous speed of the doubly-fed induction motor ac currents are fed into both the stator and rotor windings of a is equal to: three-phase wound-rotor induction machine, the machine also operates as a synchronous machine. In this situation, when the nS (DF) 120 × (fStator — fRotor) wound-rotor induction machine operates as a synchronous motor, it = is referred to as a doubly-fed induction motor since electrical NPoSe power from the power network is converted into mechanical power available at the machine shaft via both the stator and rotor Where nS (DF) is the synchronous speed of the windings of the machine. -

Rotating DC Motors Part I
Rotating DC Motors Part I The previous lesson introduced the simple linear motor. Linear motors have some practical applications, but rotating DC motors are much more prolific. The principles which explain the operation of linear motors are the same as those which explain the operation of practical DC motors. The fundamental difference between linear motors and practical DC motors is that DC motors rotate rather than move in a straight line. The same forces that cause a linear motor to move “right or left” in a straight line cause the DC motor to rotate. This chapter will examine how the linear motor principles can be used to make a practical DC motor spin. 16.1 Electrical machinery Before discussing the DC motor, this section will briefly introduce the parts of an electrical machine. But first, what is an electrical machine? An electrical machine is a term which collectively refers to motors and generators, both of which can be designed to operate using AC (Alternating Current) power or DC power. In this supplement we are only looking at DC motors, but these terms will also apply to the other electrical machines. 16.1.1 Physical parts of an electrical machine It should be apparent that the purpose of an electrical motor is to convert electrical power into mechanical power. Practical DC motors do this by using direct current electrical power to make a shaft spin. The mechanical power available from the spinning shaft of the DC motor can be used to perform some useful work such as turn a fan, spin a CD, or raise a car window. -

The Design of Turbo Field Magnets for Alternate-Current Generators with Special Reference to Large Units at High Speeds
1910.] WALKER: DESIGN OF TURBO FIELD MAGNETS. 319 THE DESIGN OF TURBO FIELD MAGNETS FOR ALTERNATE-CURRENT GENERATORS WITH SPECIAL REFERENCE TO LARGE UNITS AT HIGH SPEEDS. By MILES WALKER, Member. (Paper received November 10, 1909, and read in London on March 10, 1910.) SUMMARY. This paper re-opens the controversy, between the salient pole type of field magnet and the cylindrical type. Reasons are given why the latter type is better suited for obtaining the greatest possible output from a given diameter. The methods adopted by various makers of supporting the windings are described, and the possible limits of output considered. THE NECESSITY OF PROVIDING LARGE GENERATING UNITS OF HIGH SPEED. In the discussion which followed the paper by Dr. Kloss, " Practical Considerations in the Selection of Turbo Alternators," before the Manchester Section of the Institution of Electrical Engineers in November, 1908, an argument arose as to whether the field magnets of turbo-generators should be made with salient poles or should be of the cylindrical type with a distributed winding. Some difference of opinion exists among designers on this point, and each method has been adopted in quite a large number of successful turbo-generators. In the opinion of the author the matter is one of great importance, because, in the future, makers of turbo-generators will be called upon to build machines of larger capacity than ever before contemplated, and the makers of steam turbines to drive them will call for extremely high speeds, so that the turbo-generator of the future will have to be capable of giving an extremely large output from a diameter which is not excessive, and will have to be constructed in a manner which permits of a high factor of safety. -

How Electric Motors Work by Marshall Brain Introduction to How Electric Motors Work
How Electric Motors Work by Marshall Brain Introduction to How Electric Motors Work Electric motors are everywhere! In your house, almost every mechanical movement that you see around you is caused by an AC (alternating current) or DC (direct current) electric motor. A simple motor has six parts:Armature or rotor, Commutator, Brushes, Axle, Field magnet, DC power supply of some sort By understanding how a motor works you can learn a lot about magnets, electromagnets and electricity in general. In this article, you will learn what makes electric motors tick. Inside an Electric Motor An electric motor is all about magnets and magnetism: A motor uses magnets to create motion. If you have ever played with magnets you know about the fundamental law of all magnets: Opposites attract and likes repel. So if you have two bar magnets with their ends marked "north" and "south," then the north end of one magnet will attract the south end of the other. On the other hand, the north end of one magnet will repel the north end of the other (and similarly, south will repel south). Inside an electric motor, these attracting and repelling forces create rotational motion. In the above diagram, you can see two magnets in the motor: The armature (or rotor) is an electromagnet, while the field magnet is a permanent magnet (the field magnet could be anelectromagnet as well, but in most small motors it isn't in order to save power). Toy Motor The motor being dissected here is a simple electric motor that you would typically find in a toy. -
Public Address System
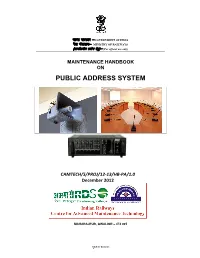
Hkkjr ljdkj &GOVERNMENT OF INDIA jsy ea=ky;& MINISTRY OF RAILWAYS ¼dk;kZy;hu iz;ksx gsrq½& (For official use only) MAINTENANCE HANDBOOK ON PUBLIC ADDRESS SYSTEM CAMTECH/S/PROJ/12‐13/HB‐PA/1.0 December 2012 MAHARAJPUR, GWALIOR – 474 005 CONTENTS Sr. No. Description Page No. 1. Introduction 1 2. Acoustic 2 3. Microphones 7 4. Loudspeaker 16 5. Amplifier 24 6. Audio Mixer Pre-Amplifier 37 7. Coference System 40 8. Maintenance 47 9. Wiring and Cabling 49 10. Earthing and other Safety Precautions 51 11. PA System at Railway Stations 53 12. Fault Finding 55 13. Precautions 58 ISSUE OF CORRECTION SLIPS The correction slips to be issued in future for this handbook will be numbered as follows: CAMTECH/S/PROJ/2012-13/HB-PA/1.0/C.S.# XX date-------------------------------- Where “XX” is the serial number of the concerned correction slip (starting from 01 onwards) CORRECTION SLIPS ISSUED Sr. No. of Date of Page No. and Item no. Remarks Corr. Slip issue modified CAMTECH/S/PROJ/12‐13/HB‐PA/1.0 1 PUBLIC ADDRESS SYSTEM 1. Introduction Public Address System (PA system) is an electronic sound amplification and distribution system with a microphone, amplifier and loudspeakers, used to allow a person to address a large public, for example for announcements of movements at large and noisy air and rail terminals. The simplest PA system consist of a microphone, an amplifier, and one or more loudspeakers is shown in fig 1. A sound source such as compact disc player or radio may be connected to a PA system so that music can be played through the system. -
GCSE Physics Edexcel Physics Magnetism, the Motor Effect And
The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club XL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club The PiXL Club -

High Magnetic Fields for Fundamental Physics
High magnetic fields for fundamental physics R´emy Battesti,1 Jerome Beard,1 Sebastian B¨oser,2 Nicolas Bruyant,1 Dmitry Budker,2, 3, 4, 5, ∗ Scott A. Crooker,6 Edward J. Daw,7 Victor V. Flambaum,2, 3, 8 Toshiaki Inada,9 Igor G. Irastorza,10 Felix Karbstein,11, 12 Dong Lak Kim,13 Mikhail G. Kozlov,14, 15 Ziad Melhem,16 Arran Phipps,17 Pierre Pugnat,18 Geert Rikken,1, y Carlo Rizzo,1, z Matthias Schott,2 Yannis K. Semertzidis,13, 19 Herman H. J. ten Kate,20 and Guido Zavattini21 1Laboratoire National des Champs Magn´etiquesIntenses (UPR 3228, CNRS-UPS-UGA-INSA), F-31400 Toulouse Cedex, France 2Johannes Gutenberg University, 55099 Mainz, Germany 3Helmholtz Institute Mainz, 55099 Mainz, Germany 4Department of Physics, University of California, Berkeley, Berkeley, California 94720- 7300, USA 5Nuclear Science Division, Lawrence Berkeley National Laboratory, Berkeley, California 94720-7300, USA 6National High Magnetic Field Laboratory, Los Alamos, New Mexico 87545, USA 7Department of Physics and Astronomy, The University of Sheffield, Hicks Building, Hounsfield Road, Sheffield S3 7RH, United Kingdom 8School of Physics, University of New South Wales, Sydney, New South Wales 2052, Australia 9International Center for Elementary Particle Physics, The University of Tokyo, 7-3-1 Hongo, Bunkyo, Tokyo 113-0033, Japan 10Grupo de Fisica Nuclear y Astroparticulas. Departamento de Fisica Teorica. Universidad de Zaragoza, 50009 Zaragoza, Spain 11Helmholtz-Institut Jena, Fr¨obelstieg 3, 07743 Jena, Germany 12Theoretisch-Physikalisches Institut, Abbe Center of Photonics, Friedrich-Schiller-Universit¨atJena, Max-Wien-Platz 1, 07743 Jena, Germany 13Center for Axion and Precision Physics Research, IBS, Daejeon 34051, Republic of Korea 14Petersburg Nuclear Physics Institute of NRC \Kurchatov Institute", Gatchina 188300, Russia 15St. -

Title: JBL's Differential Drive® Transducers
Technical Note Volume 1, Number 33 Title: JBL's Differential Drive® Transducers 1. Introduction: Differential Drive technology in detail. JBL Professional introduced the Differential 2. Anatomy of a Differential Drive transducer: Drive concept in the EON System in 1995 as a means of attaining maximum system perform- The simplest way to understand Differential Drive is ance with minimum weight. Compared with tra- to compare it directly with JBL’s traditional motor ditional driver designs, JBL’s patented structures. Figure 1 shows a section view of a tradi- Differential Drive makes use of a pair of in-line tional JBL magnet-voice coil assembly and a voice coils in separate magnetic gaps instead Differential Drive system. As a starting point, let us of a single voice coil-gap combination. This design the Differential Drive system so that its permits a more effective use of available parameters are identical to those of the traditional space, and allows more efficient removal of motor structure, with the same electrical-to-mechani- heat from the motor structure. Specifically, the cal coupling and the same moving mass. voice coils are reversely wound and are In the traditional design, magnetic flux density B immersed in magnetic fields of opposite polari- crosses a gap in which a coil of wire of length l is ty. This ensures reduced magnetic leakage flux placed. The coil has an electrical resistance, R . and focuses more magnetic energy in the gaps E These quantities establish the value of (Bl)2/R , where it is needed. Both ferrite and neodymi- E which is the electromechanical coupling factor of the um-iron-boron (NIB) magnets can be used, driver. -

Paper Speaker
Paper Speaker Introduction: How do you listen to music? Whether you use headphones or a large sound system you are undoubtedly using some combination of speakers, but how do speakers create sound? In this activity you will construct your own speaker in order to learn how electromagnetism is used to fill the air with music. The sound we hear is a result of our brains interpreting the changes in air pressure detected by our ear drums. These changes in air pressure are what we call sound waves. When air is mechanically compressed and stretched the air molecules bump into each other, causing the pattern to move through the air where it hits your eardrum and your brain interprets it as a sound. This mechanical stretching and compressing of the air is caused by physical objects vibrating at various frequencies in the world around you. The faster the vibrations are the higher the frequency of the sound waves created, which your brain interprets as a higher pitched sound. A speaker is an electro‐mechanical device designed to transform electric signals into mechanical motions that generate sound. Sounds are typically stored on a computer as a compressed file that contains information about the frequency and intensity of the sound. When these files are “played” the computer decompresses the file and sends electric signals corresponding to the sound data through whatever output medium you are using. These electric signals turn on an electro‐magnet, called the voice coil, which reverses polarity depending on the signals it is receiving. A permanent magnet, located either inside the electro‐magnet, or surrounding it, forces the electro‐magnet to move up and down as the polarity changes. -

Current-Driving of Loudspeakers
IV First Edition 2010 Copyright © 2010 Esa T. Meriläinen All rights reserved Homepage: www.current-drive.info ISBN: 1450544002 EAN-13: 9781450544009 Published in the U.S.A. through a print-on-demand service While every precaution has been taken to ensure the accuracy of infor- mation presented herein, the author and publisher assume no responsi- bility for errors or omissions. Nor is any liability assumed for any pos- sible damages or losses arising from the use of this information. 1 SOME PARALLELS 1.1 The Era of Direct Current The issue whether loudspeakers should be excited by a voltage or current signal is quite well comparable to a dispute that took place over a century ago, concerning whether the production and distribution of electricity should operate on direct or alternating current. Thomas A. Edison had opened, in New York, the world's first power generating plant, that supplied a DC voltage of 110 volts for an area of a few square kilometres in Manhattan. Another pioneer of electrical tech- nology, Croatian-born Nikola Tesla, instead, believed strongly in the su- periority of the three-phase AC system he had developed. In 1886, George Westinghouse founded an electric company to utilize the inven- tions and patents of Tesla and to compete with Edison. Edison was not at all pleased seeing a rivaling system threatening his dominating stature in power production. The conflict caused a breach between Edison and Tesla, and a public struggle about which system would become prevalent. Edison even resorted to a trick campaign in his attempt to defame AC power, that he thought was dangerous.