Future Towed Arrays - Operational Drivers and Technology Solutions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Estimating Your Air Consumption
10/29/2019 Alert Diver | Estimating Your Air Consumption Estimating Your Air Consumption Advanced Diving Public Safety Diving By Mike Ange Mastering Neutral Buoyancy and Trim Military Diving Technical Diving Scientific Diving and Safety Program Oversight Seeing the Reef in a New Light ADVERTISEMENT Do you have enough breathing gas to complete the next dive? Here's how to find out. It is a warm clear day, and the Atlantic Ocean is like glass. As you drop into the water for a dive on North Carolina's famous U-352 wreck, you can see that the :: captain has hooked the wreck very near the stern. It is your plan to circumnavigate the entire structure and get that perfect photograph near the exposed bow torpedo tube. You descend to slightly below 100 feet, reach the structure and take off toward the bow. Unfortunately, you are only halfway, just approaching the conning tower, when your buddy signals that he is running low on air. Putting safety first, you return with him to the ascent line — cursing the lost opportunity and vowing to find a new buddy. If you've ever experienced the disappointment of ending a dive too soon for lack of breathing gas or, worse, had to make a hurried ascent because you ran out of air, it may surprise you to learn that your predicament was entirely predictable. With a little planning and some basic calculations, you can estimate how much breathing gas you will need to complete a dive and then take steps to ensure an adequate supply. It's a process that technical divers live by and one that can also be applied to basic open-water diving. -

8. Decompression Procedures Diver
TDI Standards and Procedures Part 2: TDI Diver Standards 8. Decompression Procedures Diver 8.1 Introduction This course examines the theory, methods and procedures of planned stage decompression diving. This program is designed as a stand-alone course or it may be taught in conjunction with TDI Advanced Nitrox, Advanced Wreck, or Full Cave Course. The objective of this course is to train divers how to plan and conduct a standard staged decompression dive not exceeding a maximum depth of 45 metres / 150 feet. The most common equipment requirements, equipment set-up and decompression techniques are presented. Students are permitted to utilize enriched air nitrox (EAN) mixes or oxygen for decompression provided the gas mix is within their current certification level. 8.2 Qualifications of Graduates Upon successful completion of this course, graduates may engage in decompression diving activities without direct supervision provided: 1. The diving activities approximate those of training 2. The areas of activities approximate those of training 3. Environmental conditions approximate those of training Upon successful completion of this course, graduates are qualified to enroll in: 1. TDI Advanced Nitrox Course 2. TDI Extended Range Course 3. TDI Advanced Wreck Course 4. TDI Trimix Course 8.3 Who May Teach Any active TDI Decompression Procedures Instructor may teach this course Version 0221 67 TDI Standards and Procedures Part 2: TDI Diver Standards 8.4 Student to Instructor Ratio Academic 1. Unlimited, so long as adequate facility, supplies and time are provided to ensure comprehensive and complete training of subject matter Confined Water (swimming pool-like conditions) 1. -
Lecture 3 Buoyancy (Archimedes' Principle)
LECTURE 3 BUOYANCY (ARCHIMEDES’ PRINCIPLE) Lecture Instructor: Kazumi Tolich Lecture 3 2 ¨ Reading chapter 11-7 ¤ Archimedes’ principle and buoyancy Buoyancy and Archimedes’ principle 3 ¨ The force exerted by a fluid on a body wholly or partially submerged in it is called the buoyant force. ¨ Archimedes’ principle: A body wholly or partially submerged in a fluid is buoyed up by a force equal to the weight of the displaced fluid. Fb = wfluid = ρfluidgV V is the volume of the object in the fluid. Demo: 1 4 ¨ Archimedes’ principle ¤ The buoyant force is equal to the weight of the water displaced. Lifting a rock under water 5 ¨ Why is it easier to lift a rock under water? ¨ The buoyant force is acting upward. ¨ Since the density of water is much greater than that of air, the buoyant force is much greater under the water compared to in the air. Fb air = ρair gV Fb water = ρwater gV The crown and the nugget 6 Archimedes (287-212 BC) had been given the task of determining whether a crown made for King Hieron II was pure gold. In the above diagram, crown and nugget balance in air, but not in water because the crown has a lower density. Clicker question: 1 & 2 7 Demo: 2 8 ¨ Helium balloon in helium ¨ Helium balloon in liquid nitrogen ¤ Demonstration of buoyancy and Archimedes’ principle Floatation 9 ¨ When an object floats, the buoyant force equals its weight. ¨ An object floats when it displaces an amount of fluid whose weight is equal to the weight of the object. -

Buoyancy Compensator Owner's Manual
BUOYANCY COMPENSATOR OWNER’S MANUAL 2020 CE CERTIFICATION INFORMATION ECLIPSE / INFINITY / EVOLVE / EXPLORER BC SYSTEMS CE TYPE APPROVAL CONDUCTED BY: TÜV Rheinland LGA Products GmbH Tillystrasse 2 D-90431 Nürnberg Notified Body 0197 EN 1809:2014+A1:2016 CE CONTACT INFORMATION Halcyon Dive Systems 24587 NW 178th Place High Springs, FL 32643 USA AUTHORIZED REPRESENTATIVE IN EUROPEAN MARKET: Dive Distribution SAS 10 Av. du Fenouil 66600 Rivesaltes France, VAT FR40833868722 REEL Diving Kråketorpsgatan 10 431 53 Mölndal 2 HALCYON.NET HALCYON BUOYANCY COMPENSATOR OWNER’S MANUAL TRADEMARK NOTICE Halcyon® and BC Keel® are registered trademarks of Halcyon Manufacturing, Inc. Halcyon’s BC Keel and Trim Weight system are protected by U.S. Patents #5855454 and 6530725b1. The Halcyon Cinch is a patent-pending design protected by U.S. and European law. Halcyon trademarks and pending patents include Multifunction Compensator™, Cinch™, Pioneer™, Eclipse™, Explorer™, and Evolve™ wings, BC Storage Pak™, Active Control Ballast™, Diver’s Life Raft™, Surf Shuttle™, No-Lock Connector™, Helios™, Proteus™, and Apollo™ lighting systems, Scout Light™, Pathfinder™ reels, Defender™ spools, and the RB80™ rebreather. WARNINGS, CAUTIONS, AND NOTES Pay special attention to information provided in warnings, cautions, and notes accompanied by these icons: A WARNING indicates a procedure or situation that, if not avoided, could result in serious injury or death to the user. A CAUTION indicates any situation or technique that could cause damage to the product, and could subsequently result in injury to the user. WARNING This manual provides essential instructions for the proper fitting, adjustment, inspection, and care of your new Buoyancy Compensator. Because Halcyon’s BCs utilize patented technology, it is very important to take the time to read these instructions in order to understand and fully enjoy the features that are unique to your specific model. -

Buoyancy Compensator Owner's Manual
BUOYANCY COMPENSATOR OWNER’S MANUAL BUOYANCY COMPENSATOR OWNER’S MANUAL Thank you for buying a DTD – DARE TO DIVE buoyancy compensator (BC). Our BC’s are manufactured from high quality materials. These materials are selected for their extreme durability and useful properties. Exceptional attention is paid to the technology and technical arrangement of all components during the manufacturing process. The advantages of DTD – DARE TO DIVE compensators are excellent craftsmanship, timeless design and variability; all thanks to production in the Czech Republic. TABLE OF CONTENTS CE certification information 2 Important warnings and precautions 2 Definitions 4 Overview of models 6 1. Wings 6 2. Backplates 7 Adjusting the backplate straps 8 1. Adjusting the shoulder straps and D-rings 8 2. Adjusting the crotch strap and D-rings 9 3. Adjusting the waist belt strap and D-ring 9 4. How to use the QUICK-FIX buckle 9 Threading the waist belt strap through the buckle 10 Tuning the compensator 11 1. Assembly of the compensator for using with single bottle 11 2. Assembly of the compensator for use with doubles 12 Optional equipment 13 1. Weighting systems 13 2. Buoy pocket 14 Pre-dive inspection of the compensator 14 Care, maintenance and storage recommendations 15 Service checks 15 General technical information 15 Operating temperature range 16 Warranty information 16 Manufacturer information 16 Annex 1 - detailed description of the wing label 17 Revised – February 2020 1 CE CERTIFICATION INFORMATION All DTD – DARE TO DIVE buoyancy compensators have been CE certified according to European standards. The CE mark governs the conditions for bringing Personal Protective Equipment to market and the health and safety requirements for this equipment. -

Chapter 15 - Fluid Mechanics Thursday, March 24Th
Chapter 15 - Fluid Mechanics Thursday, March 24th •Fluids – Static properties • Density and pressure • Hydrostatic equilibrium • Archimedes principle and buoyancy •Fluid Motion • The continuity equation • Bernoulli’s effect •Demonstration, iClicker and example problems Reading: pages 243 to 255 in text book (Chapter 15) Definitions: Density Pressure, ρ , is defined as force per unit area: Mass M ρ = = [Units – kg.m-3] Volume V Definition of mass – 1 kg is the mass of 1 liter (10-3 m3) of pure water. Therefore, density of water given by: Mass 1 kg 3 −3 ρH O = = 3 3 = 10 kg ⋅m 2 Volume 10− m Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Atmospheric pressure (1 atm.) is equal to 101325 N.m-2. 1 pound per square inch (1 psi) is equal to: 1 psi = 6944 Pa = 0.068 atm 1atm = 14.7 psi Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Pressure in Fluids Pressure, " p, is defined as force per unit area: # Force F p = = [Units – N.m-2, or Pascal (Pa)] " A8" rea A + $ In the presence of gravity, pressure in a static+ 8" fluid increases with depth. " – This allows an upward pressure force " to balance the downward gravitational force. + " $ – This condition is hydrostatic equilibrium. – Incompressible fluids like liquids have constant density; for them, pressure as a function of depth h is p p gh = 0+ρ p0 = pressure at surface " + Pressure in Fluids Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A In the presence of gravity, pressure in a static fluid increases with depth. -

Imaging Sonar Systems -- Assessment Summary
October 2011 System Assessment and Validation for Emergency Responders (SAVER) Summary Imaging Sonar Systems (AEL reference number 03WA-02-SONR) In order to provide emergency responders with information on currently available imaging sonar systems, the Space and Naval Warfare Systems Center (SPAWARSYSCEN) Atlantic conducted a comparative assessment of The U.S. Department of Homeland Security imaging sonar systems for the System Assessment and Validation for (DHS) established the System Assessment and Validation for Emergency Responders Emergency Responders (SAVER) Program in July 2010. Detailed findings are (SAVER) Program to assist emergency provided in the Imaging Sonar Systems Assessment Report, which is available responders making procurement decisions. by request at https://www.rkb.us/SAVER. Located within the Science and Technology Background Directorate (S&T) of DHS, the SAVER Program conducts objective assessments Imaging sonar is a high-frequency, narrow field of view, underwater sonar that and validations on commercial equipment produces video-like acoustic imagery that is used to detect and identify and systems, and provides those results submerged objects of interest, even in low- to no-visibility conditions. along with other relevant equipment Imaging sonar systems can be hull-, tripod-, or pole-mounted; attached to a information to the emergency response remotely operated underwater vehicle (ROV); or hand-carried by a diver. community in an operationally useful form. SAVER provides information on equipment Emergency responders may use imaging sonar systems to: that falls within the categories listed in the DHS Authorized Equipment List (AEL). ● Inspect ship hulls or the individual pilings of piers and bridges; ● Direct divers to an area of interest; The SAVER Program is supported by a ● Track divers underwater; network of technical agents who perform ● Inspect an object or area of interest before deploying divers; and assessment and validation activities. -

7 Mistakes Divers Make: and How to Avoid Them
DAN’s Smart Guide to Safe Diving 7 Mistakes Divers Make: And How to Avoid Them Learn safety guidelines. Become conscientious and responsible divers. Prepare smarter so we can enjoy our dives. 1 NEGLECTING HEALTH AND FITNESS HEALTH Few people enjoy perfect health for their entire lives. Adopting a healthy lifestyle early in life can help postpone ailments associated with aging. When health issues present, it’s important to discuss them with your healthcare provider, pursue appropriate interventions and adopt modifications. With ongoing awareness of your personal health status and timely adjustments to maintain your health, diving can be a lifelong recreational activity. Prior to diving, you should take an honest assessment of whether you are medically fit to dive. Be vigilant for signs of acute illness (like congestion) and familiarize yourself with the risks and essential precautions associated with any chronic diseases. Acute illness that lasts more than a few days or leaves you feeling exhausted should prompt a delay to diving. Do not dive when ill. Wait until you regain your normal strength and stamina. If you are not ready to exercise at your pre-illness level, you should postpone your dive. The best course of action is to consult with your physician. Chronic diseases may affect your fitness to dive risks even if you perform well in other activities. Some health conditions, especially in advanced stages, may make the risks to you and your dive buddies unacceptably high. In less advanced or more stable medical conditions, divers may continue safe and enjoyable diving with proper guidance from their physician, medical controls and wise choices. -
Experiment 12 Archimedes' Principle
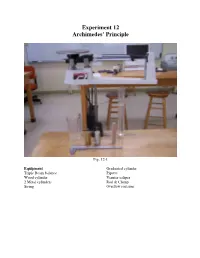
Experiment 12 Archimedes’ Principle Fig. 12-1 Equipment Graduated cylinder Triple Beam balance Pipette Wood cylinder Vernier caliper 2 Metal cylinders Rod & Clamp String Overflow container Experiment 12 Archimedes’ Principle Advance Reading: Serway & Jewett - Chapter 14, Section 14-4 Objective: The objective of this lab is to measure the buoyant force on a number of objects. Theory: Archimedes’ principle states that a body wholly or partially submerged in a fluid is buoyed up by a force equal in magnitude to the weight of the fluid displaced by the body. It is important to remember that fluid includes liquids and gases. This force is given by: FB = ρVg (Eq 1) where ρ (rho) is the density of the fluid, V is the volume of fluid displaced and g is acceleration due to gravity. It is the buoyant force that keeps ships afloat in water and hot air balloons floating in air. In this experiment, the buoyant force will be measured three ways and the results compared. The first method is by the measurement of force. This method involves weighing an object first in air, then in water, and using the difference in weight as the buoyant force. Though the object's mass does not change, its apparent weight will change when measured while immersed in a fluid that is denser than air. The second method is the displaced volume method. The volume of fluid displaced by the object is measured and its weight calculated. The weight of the water displaced is equal to the buoyant force exerted on the object, by Archimedes' Principle. -

Buoyancy White Paper
NPCA Buoyancy White Paper November 2018 Section 1- Buoyancy Guide 1.1 Intro Buoyancy is defined as the tendency of a fluid to exert a supporting upward force on a body placed in a fluid (i.e., a liquid or a gas). The fluid can be a liquid, as in the case of a boat floating on a lake, or the fluid can be a gas, as in a helium-filled balloon floating in the atmosphere. An elementary application of buoyancy can be seen when trying to push an empty water bottle downward in a sink full of water. When applying a downward force to the water bottle from your hand, the water bottle will stay suspended in place. But, as soon as you remove your hand from the water bottle, the water bottle will float to the surface. The buoyant force on the object determines whether a given object will sink or float in a fluid. It can be determined if an underground concrete structure will float or sink using basic buoyancy principles and applying them to a concrete structure. Essentially a concrete structure will not float if the sum of the vertical downward forces (gravitational, W) is greater than the vertical upward force (buoyant, Fb). When applying this principle to a structure below grade, it can be said that if the buoyant force (Fb) is greater than the mass of the structure and the combined mass of soil surcharges and objects contained within the structure, the structure will float. People have been aware of objects floating or sinking in a fluid since the beginning of time. -

Downloadable Resources
Grade 8: Fluids Cartesian Diver Understanding Matter and Energy Safety Parental supervision and help is Lesson Plan Notes always encouraged! Description Students will learn about buoyancy and density while completing the Cartesian Diver experiment. Materials - A plastic bottle with sealable lid (1L or 2L pop bottle) - A straw (alternative: pen cap) - Paper Clips (or other small weights) - An elastic (alternative: paper clip) - Water Note: if using a pen cap, make sure there are no holes on the top. If it does, cover holes with tape or clay. Science Background This activity demonstrates multiple scientific concepts. 1. Density – everything that has mass has density. Density is determined by dividing an object's mass (weight) by its volume (the amount of space an object takes up). The density triangle on the side of the page demonstrates how scientists can determine something's density, mass or volume, if provided the other two variables. In general, solids are more dense than liquids because their particles are closer together. Liquids are more dense than gases because their particles are closer together. This is why it is very difficult to compress a liquid compared to a gas. 2. Buoyancy – the ability for an item to float or sink in a fluid. We can figure out if an object will float or sink based on its density compared to the density of the fluid it is placed in. An object that is less dense than the fluid will float and is positively buoyant (left on diagram). An object that is more dense will sink and is negatively buoyant (right on diagram). -
Archimedes' Principle
LECTURE 3 BUOYANCY (ARCHIMEDES’ PRINCIPLE) Lecture Instructor: Kazumi Tolich Lecture 3 2 ¨ Reading chapter 15.4 and 15.5 ¤ Archimedes’ principle and buoyancy Buoyancy and Archimedes’ principle 3 ¨ The force exerted by a fluid on a body wholly or partially submerged in it is called the buoyant force. ¨ Archimedes’ principle: An object completely immersed in a fluid experiences an upward buoyant force equal in magnitude to the weight of fluid displaced by the object. �" = �%&'()�� � is the volume of displaced fluid by the object. Demo: 1 4 ¨ Archimedes’ principle ¤ The buoyant force is equal to the weight of the water displaced. Quiz: 1 5 ¨ Suppose that a rock is sitting on a chair, both submerged in water. Another identical rock is sitting on a chair in the air. Which chair exerts greater normal force on the rock? A. The chair in the water B. The chair in the air C. Actually, both chairs exert the same amount of force. Quiz: 3-1 answer 6 A. The chair in the air ¨ The rock is sitting, so it is not accelerating. The net force on it is zero. ¨ The rock has the following forces: buoyant force by the fluid (upward), normal force by the chair (upward), and weight (downward) �/6 ¨ The weight of the rocks are the same since they are identical. �/% ¨ The buoyant force by the air is smaller because air is less dense while �/8 the volume of the rocks are identical: �", .(/ = �.(/�� < �", 1.23/ = �1.3/��. ¨ This is why it is easier to lift a rock (or any object) in water than in air.