SIGNAL GENERATION on Digital Signal Processors
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Moogerfooger® MF-107 Freqbox™
Understanding and Using your moogerfooger® MF-107 FreqBox™ TABLE OF CONTENTS Introduction.................................................2 Getting Started Right Away!.......................4 Basic Applications......................................6 FreqBox Theory........................................10 FreqBox Functions....................................16 Advanced Applications.............................21 Technical Information...............................24 Limited Warranty......................................25 MF-107 Specifications..............................26 1 Welcome to the world of moogerfooger® Analog Effects Modules. Your Model MF-107 FreqBox™ is a rugged, professional-quality instrument, designed to be equally at home on stage or in the studio. Its great sound comes from the state-of-the- art analog circuitry, designed and built by the folks at Moog Music in Asheville, NC. Your MF-107 FreqBox is a direct descendent of the original modular Moog® synthesizers. It contains several complete modular synth functions: a voltage-controlled oscillator (VCO) with variable waveshape, capable of being hard synced and frequency modulated by the audio input, and an envelope follower which allows the dynamics of the input signal to modulate the frequency of the VCO. In addition the amplitude of the VCO is controlled by the dynamics of the input signal, and the VCO can be mixed with the audio input. All performance parameters are voltage-controllable, which means that you can use expression pedals, MIDI-to-CV converter, or any other source of control voltages to 'play' your MF-107. Control voltage outputs mean that the MF-107 can be used with other moogerfoogers or voltage controlled devices like the Minimoog Voyager® or Little Phatty® synthesizers. While you can use it on the floor as a conventional effects box, your MF-107 FreqBox is much more versatile and its sound quality is higher than the single fixed function "stomp boxes" that you may be accustomed to. -

Pulse Width Modulation
International Journal of Research in Engineering, Science and Management 38 Volume-2, Issue-12, December-2019 www.ijresm.com | ISSN (Online): 2581-5792 Pulse Width Modulation M. Naganetra1, R. Ramya2, D. Rohini3 1,2,3Student, Dept. of Electronics & Communication Engineering, K. S. Institute of Technology, Bengaluru India Abstract: This paper presents pulse width modulation which can 2. Principle be controlled by duty cycle. Pulse width modulation(PWM) is a Pulse width modulation uses a rectangular pulse wave powerful technique for controlling analog circuits with a digital signal. PWM is widely used in different applications, ranging from whose pulse width is modulated resulting in the variation of the measurement and communications to power control and average value of the waveform. If we consider a pulse signal conversions, which transforms the amplitude bounded input f(t), with period T, low value Y-min, high value Y-max and a signals into the pulse width output signal without suffering noise duty cycle D. Average value of the output signal is given by, quantization. The frequency of output signal is usually constant. By controlling analog circuits digitally, system cost and power 1 푇 푦̅= ∫ 푓(푡)푑푡 consumption can be reduced. The PWM signal is still digital 푇 0 because, at any instant of time, the full DC supply will be either fully_ ON or fully _OFF. Given a sufficient bandwidth, any analog 3. PWM generator signals (sine, square, triangle and so on) can be encoded with PWM. Keywords: decrease-duty, duty cycle, increase-duty, PWM (pulse width modulation), RTL view 1. Introduction Pulse width modulation (or pulse duration modulation) is a method of reducing the average power delivered by an electrical Fig. -

How Can You Replicate Real World Signals? Precisely
How can you replicate real world signals? Precisely tç)[UP.)[ 7QQ PSDIBOOFMT FG400 Series t*OUVJUJWFPQFSBUJPOXJUIBw Arbitrary/Function Generator LCD screen t4ZODISPOJ[FVQUPVOJUTUP QSPWJEFVQUPPVUQVU DIBOOFMT t"WBSJFUZPGTXFFQTBOE modulations Bulletin FG400-01EN Features and benefits FG400 Series Features and CFOFýUT &BTJMZHFOFSBUFCBTJD BQQMJDBUJPOTQFDJýDBOEBSCJUSBSZXBWFGPSNT 2 The FG400 Arbitrary/Function Generator provides a wide variety of waveforms as standard and generates signals simply and easily. There are one channel (FG410) and two channel (FG420) models. As the output channels are isolated, an FG400 can also be used in the development of floating circuits. (up to 42 V) Basic waveforms Advanced functions 4JOF DC 4XFFQ.PEVMBUJPO Burst 0.01 μHz to 30 MHz ±10 V/open Frequency sweep "VUP Setting items Oscillation and stop are 4RVBSF start/stop frequency, time, mode automatically repeated with the (continuous, single, gated single), respectively specified wave number. function (one-way/shuttle, linear/ log) 0.01 μHz to 15 MHz, variable duty Pulse 18. Trigger Setting items Oscillation with the specified wave carrier duty, peak duty deviation number is done each time a trigger Output duty is received. the range of carrier duty ±peak duty deviation 0.01 μHz to 15 MHz, variable leading/trailing edge time Ramp ". Gate Setting items Oscillation is done in integer cycles carrier amplitude, modulation depth or half cycles while the gate is on. Output amp. the range of amp./2 × (1 ±mod. 0.01 μHz to 5 MHz, variable symmetry Depth/100) 3 For trouble shooting Arbitrary waveforms (16 bits amplitude resolution) of up to 512 K words per waveform can be generated. 128 waveforms with a total size of 4 M words can be saved to the internal non-volatile memory. -

The 1-Bit Instrument: the Fundamentals of 1-Bit Synthesis
BLAKE TROISE The 1-Bit Instrument The Fundamentals of 1-Bit Synthesis, Their Implementational Implications, and Instrumental Possibilities ABSTRACT The 1-bit sonic environment (perhaps most famously musically employed on the ZX Spectrum) is defined by extreme limitation. Yet, belying these restrictions, there is a surprisingly expressive instrumental versatility. This article explores the theory behind the primary, idiosyncratically 1-bit techniques available to the composer-programmer, those that are essential when designing “instruments” in 1-bit environments. These techniques include pulse width modulation for timbral manipulation and means of generating virtual polyph- ony in software, such as the pin pulse and pulse interleaving techniques. These methodologies are considered in respect to their compositional implications and instrumental applications. KEYWORDS chiptune, 1-bit, one-bit, ZX Spectrum, pulse pin method, pulse interleaving, timbre, polyphony, history 2020 18 May on guest by http://online.ucpress.edu/jsmg/article-pdf/1/1/44/378624/jsmg_1_1_44.pdf from Downloaded INTRODUCTION As unquestionably evident from the chipmusic scene, it is an understatement to say that there is a lot one can do with simple square waves. One-bit music, generally considered a subdivision of chipmusic,1 takes this one step further: it is the music of a single square wave. The only operation possible in a -bit environment is the variation of amplitude over time, where amplitude is quantized to two states: high or low, on or off. As such, it may seem in- tuitively impossible to achieve traditionally simple musical operations such as polyphony and dynamic control within a -bit environment. Despite these restrictions, the unique tech- niques and auditory tricks of contemporary -bit practice exploit the limits of human per- ception. -

Lab 4: Using the Digital-To-Analog Converter
ECE2049 – Embedded Computing in Engineering Design Lab 4: Using the Digital-to-Analog Converter In this lab, you will gain experience with SPI by using the MSP430 and the MSP4921 DAC to create a simple function generator. Specifically, your function generator will be capable of generating different DC values as well as a square wave, a sawtooth wave, and a triangle wave. Pre-lab Assignment There is no pre-lab for this lab, yay! Instead, you will use some of the topics covered in recent lectures and HW 5. Lab Requirements To implement this lab, you are required to complete each of the following tasks. You do not need to complete the tasks in the order listed. Be sure to answer all questions fully where indicated. As always, if you have conceptual questions about the requirements or about specific C please feel free to as us—we are happy to help! Note: There is no report for this lab! Instead, take notes on the answers to the questions and save screenshots where indicated—have these ready when you ask for a signoff. When you are done, you will submit your code as well as your answers and screenshots online as usual. System Requirements 1. Start this lab by downloading the template on the course website and importing it into CCS—this lab has a slightly different template than previous labs to include the functionality for the DAC. Look over the example code to see how to use the DAC functions. 2. Your function generator will support at least four types of waveforms: DC (a constant voltage), a square wave, sawtooth wave, and a triangle wave, as described in the requirements below. -

Contribution of the Conditioning Stage to the Total Harmonic Distortion in the Parametric Array Loudspeaker
Universidad EAFIT Contribution of the conditioning stage to the Total Harmonic Distortion in the Parametric Array Loudspeaker Andrés Yarce Botero Thesis to apply for the title of Master of Science in Applied Physics Advisor Olga Lucia Quintero. Ph.D. Master of Science in Applied Physics Science school Universidad EAFIT Medellín - Colombia 2017 1 Contents 1 Problem Statement 7 1.1 On sound artistic installations . 8 1.2 Objectives . 12 1.2.1 General Objective . 12 1.2.2 Specific Objectives . 12 1.3 Theoretical background . 13 1.3.1 Physics behind the Parametric Array Loudspeaker . 13 1.3.2 Maths behind of Parametric Array Loudspeakers . 19 1.3.3 About piezoelectric ultrasound transducers . 21 1.3.4 About the health and safety uses of the Parametric Array Loudspeaker Technology . 24 2 Acquisition of Sound from self-demodulation of Ultrasound 26 2.1 Acoustics . 26 2.1.1 Directionality of Sound . 28 2.2 On the non linearity of sound . 30 2.3 On the linearity of sound from ultrasound . 33 3 Signal distortion and modulation schemes 38 3.1 Introduction . 38 3.2 On Total Harmonic Distortion . 40 3.3 Effects on total harmonic distortion: Modulation techniques . 42 3.4 On Pulse Wave Modulation . 46 4 Loudspeaker Modelling by statistical design of experiments. 49 4.1 Characterization Parametric Array Loudspeaker . 51 4.2 Experimental setup . 52 4.2.1 Results of PAL radiation pattern . 53 4.3 Design of experiments . 56 4.3.1 Placket Burmann method . 59 4.3.2 Box Behnken methodology . 62 5 Digital filtering techniques and signal distortion analysis. -

Fourier Series
Chapter 10 Fourier Series 10.1 Periodic Functions and Orthogonality Relations The differential equation ′′ y + 2y = F cos !t models a mass-spring system with natural frequency with a pure cosine forcing function of frequency !. If 2 = !2 a particular solution is easily found by undetermined coefficients (or by∕ using Laplace transforms) to be F y = cos !t. p 2 !2 − If the forcing function is a linear combination of simple cosine functions, so that the differential equation is N ′′ 2 y + y = Fn cos !nt n=1 X 2 2 where = !n for any n, then, by linearity, a particular solution is obtained as a sum ∕ N F y (t)= n cos ! t. p 2 !2 n n=1 n X − This simple procedure can be extended to any function that can be repre- sented as a sum of cosine (and sine) functions, even if that summation is not a finite sum. It turns out that the functions that can be represented as sums in this form are very general, and include most of the periodic functions that are usually encountered in applications. 723 724 10 Fourier Series Periodic Functions A function f is said to be periodic with period p> 0 if f(t + p)= f(t) for all t in the domain of f. This means that the graph of f repeats in successive intervals of length p, as can be seen in the graph in Figure 10.1. y p 2p 3p 4p 5p Fig. 10.1 An example of a periodic function with period p. -
Tektronix Signal Generator
Signal Generator Fundamentals Signal Generator Fundamentals Table of Contents The Complete Measurement System · · · · · · · · · · · · · · · 5 Complex Waves · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 The Signal Generator · · · · · · · · · · · · · · · · · · · · · · · · · · · · 6 Signal Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Analog or Digital? · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 7 Analog Modulation · · · · · · · · · · · · · · · · · · · · · · · · · 15 Basic Signal Generator Applications· · · · · · · · · · · · · · · · 8 Digital Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Verification · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Frequency Sweep · · · · · · · · · · · · · · · · · · · · · · · · · · · 16 Testing Digital Modulator Transmitters and Receivers · · 8 Quadrature Modulation · · · · · · · · · · · · · · · · · · · · · 16 Characterization · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Digital Patterns and Formats · · · · · · · · · · · · · · · · · · · 16 Testing D/A and A/D Converters · · · · · · · · · · · · · · · · · 8 Bit Streams · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 17 Stress/Margin Testing · · · · · · · · · · · · · · · · · · · · · · · · · · · 9 Types of Signal Generators · · · · · · · · · · · · · · · · · · · · · · 17 Stressing Communication Receivers · · · · · · · · · · · · · · 9 Analog and Mixed Signal Generators · · · · · · · · · · · · · · 18 Signal Generation Techniques -

Pulse Width Modulation with Frequency Changing
Pulse Width Modulation with Frequency Changing Milan Stork, Petr Weissar, and Kamil Kosturik Department of Applied Electronics and Telecommunications/RICE, Faculty of Electrical Engineering, Umiversity of West Bohemia, Czech Republic [email protected], [email protected], [email protected] Abstract generated using a simple oscillator) and a comparator. For the demodulation of the PWM signal the classical concept employs Pulse width modulation (PWM) is widely used in different a simple low pass filter. Another possibility is described in [3, applications. PWM transform the information in the 4]. There the demodulation is made in two steps. First the PWM amplitude of a bounded input signal into the pulse width signal is transformed into a pulse amplitude signal (PAM). As a output signal, without suffering from quantization noise. result we have an equidistant pulse train where the amplitude of The frequency of the output signal is usually constant. In the pulses contains the information. In the second step the PAM this paper the new PWM system with frequency changing signal is processed with a low pass filter. This reconstructs the (PWMF) is described. In PWMF the pulse width and also original signal waveform. These two step demodulation is frequency is changed, therefore 2 independents information exactly the reverse way to the uniform sampling process. The are simultaneously transmitted, and PWM and frequency main disadvantage is lowpass filter because slow response. The modulation (FM) are simultaneously used. But such system similar (speed limitation) is for FM signal. needs fast demodulator separately for PWM and FM. The In this paper is described new approach for fast circuit for fast demodulation of PWMF signal is also demodulation of PWM signal and also for FM signal. -
Oscilators Simplified
SIMPLIFIED WITH 61 PROJECTS DELTON T. HORN SIMPLIFIED WITH 61 PROJECTS DELTON T. HORN TAB BOOKS Inc. Blue Ridge Summit. PA 172 14 FIRST EDITION FIRST PRINTING Copyright O 1987 by TAB BOOKS Inc. Printed in the United States of America Reproduction or publication of the content in any manner, without express permission of the publisher, is prohibited. No liability is assumed with respect to the use of the information herein. Library of Cangress Cataloging in Publication Data Horn, Delton T. Oscillators simplified, wtth 61 projects. Includes index. 1. Oscillators, Electric. 2, Electronic circuits. I. Title. TK7872.07H67 1987 621.381 5'33 87-13882 ISBN 0-8306-03751 ISBN 0-830628754 (pbk.) Questions regarding the content of this book should be addressed to: Reader Inquiry Branch Editorial Department TAB BOOKS Inc. P.O. Box 40 Blue Ridge Summit, PA 17214 Contents Introduction vii List of Projects viii 1 Oscillators and Signal Generators 1 What Is an Oscillator? - Waveforms - Signal Generators - Relaxatton Oscillators-Feedback Oscillators-Resonance- Applications--Test Equipment 2 Sine Wave Oscillators 32 LC Parallel Resonant Tanks-The Hartfey Oscillator-The Coipltts Oscillator-The Armstrong Oscillator-The TITO Oscillator-The Crystal Oscillator 3 Other Transistor-Based Signal Generators 62 Triangle Wave Generators-Rectangle Wave Generators- Sawtooth Wave Generators-Unusual Waveform Generators 4 UJTS 81 How a UJT Works-The Basic UJT Relaxation Oscillator-Typical Design Exampl&wtooth Wave Generators-Unusual Wave- form Generator 5 Op Amp Circuits -

Fourier Transforms
Fourier Transforms Mark Handley Fourier Series Any periodic function can be expressed as the sum of a series of sines and cosines (or varying amplitides) 1 Square Wave Frequencies: f Frequencies: f + 3f Frequencies: f + 3f + 5f Frequencies: f + 3f + 5f + … + 15f Sawtooth Wave Frequencies: f Frequencies: f + 2f Frequencies: f + 2f + 3f Frequencies: f + 2f + 3f + … + 8f 2 Fourier Series A function f(x) can be expressed as a series of sines and cosines: where: Fourier Transform Fourier Series can be generalized to complex numbers, and further generalized to derive the Fourier Transform. Forward Fourier Transform: Inverse Fourier Transform: Note: 3 Fourier Transform Fourier Transform maps a time series (eg audio samples) into the series of frequencies (their amplitudes and phases) that composed the time series. Inverse Fourier Transform maps the series of frequencies (their amplitudes and phases) back into the corresponding time series. The two functions are inverses of each other. Discrete Fourier Transform If we wish to find the frequency spectrum of a function that we have sampled, the continuous Fourier Transform is not so useful. We need a discrete version: Discrete Fourier Transform 4 Discrete Fourier Transform Forward DFT: The complex numbers f0 … fN are transformed into complex numbers F0 … Fn Inverse DFT: The complex numbers F0 … Fn are transformed into complex numbers f0 … fN DFT Example Interpreting a DFT can be slightly difficult, because the DFT of real data includes complex numbers. Basically: The magnitude of the complex number for a DFT component is the power at that frequency. The phase θ of the waveform can be determined from the relative values of the real and imaginary coefficents. -
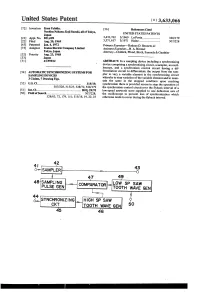
Tooth Wave Supplied to One Deflection Axis of 50 Field of Search
United States Patent (11) 3,633,066 72) Inventors Kozo Uchida; Naohisa Nakaya; Koji Suzuki, all of Tokyo, 56 References Cited Japan UNITED STATES PATENTS (21) Appl. No. 851,609 3,432,762 3/1969 La Porta....................... 328/179 22) Fied Aug. 20, 1969 3,571,617 3/1971 Hainz........................... 307/228 45) Patented Jan. 4, 1972 Primary Examiner-Rodney D. Bennett, Jr. 73 Assignee Iwatsu Electric Company Limited Assistant Examiner-H. A. Birmiel Tokyo, Japan Attorney-Chittick, Pfund, Birch, Samuels & Gauthier 32) Priority Aug. 23, 1968 33 Japan 31) 43/59922 ABSTRACT: In a sampling device including a synchronizing device comprising a synchronizing circuit, a sampler, an oscil loscope, and a synchronism control circuit having a dif 54) AUTOMATICSYNCHRONIZING SYSTEMSFOR ferentiation circuit to differentiate the output from the sam SAMPLNG EDEVICES pler to vary a variable element in the synchronizing circuit whereby to stop variation of the variable element and to main 3 Claims, 7 Drawing Figs. tain the same in the stopped condition upon reaching 52) U.S.C........................................................ 315/19, synchronism there is provided means to stop the operation of 307/228, 315125,328/72,328/179 the synchronism control circuit over the flyback interval of a (51) Int. Cl......................................................... H01j29/70 low-speed sawtooth wave supplied to one deflection axis of 50 Field of Search............................................ 307/228; the oscilloscope to prevent loss of synchronization which 328/63, 72, 179, 151; 315/18, 19, 22, 25 otherwise tends to occur during the flyback interval. LOW SP SAW 48SAMPLNGPULSE GEN COMPARATOR TOOTH WAVE GEN SYNCHRONIZING HGH SP SAW CKT TOOTH WAVE GEN 46 PATENTEDIAN 4972 3,633,066 SHEET 1 OF 2 - - - - - - - - - - was - - - - - - - - - - - - - -- a-- - - - F.