Delta Modulation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
DELTA MODULATION CODEC Meets Mil-Std-188-113 Features
DATA BULLETIN DELTA MODULATION CODEC MX629 meets Mil-Std-188-113 Features Applications Meets Mil-Std-188-113 Military Communications Single Chip Full Duplex CVSD CODEC Multiplexers, Switches, & Phones On-chip Input and Output Filters Programmable Sampling Clocks 3- or 4-bit Companding Algorithm Powersave Capabilities Low Power, 5.0V Operation ➤ ➤ ➤ ➤➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤ ➤➤➤ ➤ The MX629 is a Continuously Variable Slope Delta Modulation (CVSD) Codec designed for use in military communications systems. This device is suitable for applications in military delta multiplexers, switches, and phones. The MX629 is designed to meet Mil-Std-188-113 specifications. Encoder input and decoder output filters are incorporated on-chip. Sampling clock rates can be programmed to 16, 32, or 64kbps from an internal clock generator or externally injected in the 8 to 64kbps range. The sampling clock frequency is output for the synchronization of external circuits. The encoder has an enable function for use in multiplexer applications. Encoder and Decoder forced idle capabilities are provided forcing 10101010…pattern in encode and a VDD/2 bias in decode. The companding circuit may be operated with an externally selectable 3- or 4-bit algorithm. The device may be placed in standby mode by selecting Powersave. A reference 1.024MHz oscillator uses an external clock or crystal. The MX629 operates with a supply voltage of 5.0V and is available in the following packages: 24-pin PLCC (MX629LH), 22-pin CERDIP (MX629J), and 22-pin PDIP (MX629P). 1998 MX-COM, Inc. www.mxcom.com Tel: 800 638 5577 336 744 5050 Fax: 336 744 5054 Doc. # 20480190.001 4800 Bethania Station Road, Winston-Salem, NC 27105-1201 USA All Trademarks and service marks are held by their respective companies. -

Lab 4: Using the Digital-To-Analog Converter
ECE2049 – Embedded Computing in Engineering Design Lab 4: Using the Digital-to-Analog Converter In this lab, you will gain experience with SPI by using the MSP430 and the MSP4921 DAC to create a simple function generator. Specifically, your function generator will be capable of generating different DC values as well as a square wave, a sawtooth wave, and a triangle wave. Pre-lab Assignment There is no pre-lab for this lab, yay! Instead, you will use some of the topics covered in recent lectures and HW 5. Lab Requirements To implement this lab, you are required to complete each of the following tasks. You do not need to complete the tasks in the order listed. Be sure to answer all questions fully where indicated. As always, if you have conceptual questions about the requirements or about specific C please feel free to as us—we are happy to help! Note: There is no report for this lab! Instead, take notes on the answers to the questions and save screenshots where indicated—have these ready when you ask for a signoff. When you are done, you will submit your code as well as your answers and screenshots online as usual. System Requirements 1. Start this lab by downloading the template on the course website and importing it into CCS—this lab has a slightly different template than previous labs to include the functionality for the DAC. Look over the example code to see how to use the DAC functions. 2. Your function generator will support at least four types of waveforms: DC (a constant voltage), a square wave, sawtooth wave, and a triangle wave, as described in the requirements below. -

The Mizoram Gazette EXTRA ORDINARY Published by Authority RNI No
- 1 - Ex-59/2012 The Mizoram Gazette EXTRA ORDINARY Published by Authority RNI No. 27009/1973 Postal Regn. No. NE-313(MZ) 2006-2008 Re. 1/- per page VOL - XLI Aizawl, Thursday 9.2.2012 Magha 20, S.E. 1933, Issue No. 59 NOTIFICATION No.A.45011/1/2010-P&AR(GSW), the 3rd February, 20122012. In exercise of the powers conferred by the proviso to Article 309 of the Constitution of India, the Governor of Mizoram is pleased to make the following Regulations relating to the Mizoram Civil Services (Combined Competitive) Examinations, namely:- 1. SHORT TITLE AND COMMENCEMENT: (i) These Regulations may be called the Mizoram Civil Services (Combined Competitive Examination) Regulations, 2011. (ii) They shall come into force from the date of their publication in the Mizoram Gazette. (iii) These Regulations shall cover recruitment examination to the Junior Grade of the Mizoram Civil Service (MCS), the Mizoram Police Service (MPS), the Mizoram Finance & Accounts Service (MF&AS) and the Mizoram Information Service (MIS). 2. DEFINITIONS: In these regulations, unless the context otherwise requires:- (i) ‘Constitution’ means the Constitution of India; (ii) ‘Commission’ means the Mizoram Public Service Commission; (iii) ‘Examination’ means a Combined Competitive Examination for recruitment to the Junior Grade of MCS, MPS, MFAS and MIS; (iv) ‘Government’ means the State Government of Mizoram; (v) ‘Governor’ means the Governor of Mizoram; (vi) ‘List’ means the list of successful candidates in the written examination and selected candidates prepared by the Commission -

Fourier Series
Chapter 10 Fourier Series 10.1 Periodic Functions and Orthogonality Relations The differential equation ′′ y + 2y = F cos !t models a mass-spring system with natural frequency with a pure cosine forcing function of frequency !. If 2 = !2 a particular solution is easily found by undetermined coefficients (or by∕ using Laplace transforms) to be F y = cos !t. p 2 !2 − If the forcing function is a linear combination of simple cosine functions, so that the differential equation is N ′′ 2 y + y = Fn cos !nt n=1 X 2 2 where = !n for any n, then, by linearity, a particular solution is obtained as a sum ∕ N F y (t)= n cos ! t. p 2 !2 n n=1 n X − This simple procedure can be extended to any function that can be repre- sented as a sum of cosine (and sine) functions, even if that summation is not a finite sum. It turns out that the functions that can be represented as sums in this form are very general, and include most of the periodic functions that are usually encountered in applications. 723 724 10 Fourier Series Periodic Functions A function f is said to be periodic with period p> 0 if f(t + p)= f(t) for all t in the domain of f. This means that the graph of f repeats in successive intervals of length p, as can be seen in the graph in Figure 10.1. y p 2p 3p 4p 5p Fig. 10.1 An example of a periodic function with period p. -

Digital Communications GATE Online Coaching Classes
GATE Online Coaching Classes Digital Communications Online Class-4 By Dr.B.Leela Kumari Assistant Professor, Department of Electronics and Communications Engineering University college of Engineering Kakinada Jawaharlal Nehru Technological University Kakinada 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 1 Session -4 Baseband Transmission • Delta Modulation • advantages and Draw Backs • SNR of DM • Adaptive Delta Modulation • Comparisons • Objective Type questions and Illustrative Problems 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 2 Delta Modulation • By the DM technique an analog signal can be encoded in to bits .hence in one sense a DM is also PCM • IN DM difference signal is encoded into just a single bit ,hence in one sense a DM is also DPCM • A single bit produces just two possibilities that is used to increase or decrease the estimate 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 3 Block diagram of DM 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 4 The DM consists of Comparator Sample and Hold circuit Up-Down Counter D/A Converter 6/24/2020 Dr. B. Leela Kumari UCEK JNTUK Kakinada 5 Comparator makes a comparison between the input base band signal m(t) and its quantized approximation Δ(t) =V(H) =V(L) Up-Down counter increments or decrements its count by one at each active edge of the clock waveform The count direction(incrementing or decrementing ) is determined by the voltage levels t the “count direction command “ input to the counter When this binary input which is also transmitted output S0(t) ,is at level V(H),the counter counts up, When it is at level V(L),the counter counts down The counter serves as accumulator D/ Converter: The digital output of the converter is converted to the analog quantized approximation by the D/ Converter 6/24/2020 Dr. -

The Scientist and Engineer's Guide to Digital Signal Processing
Index 643 Index A-law companding, 362-364 Brackets, indicating discrete signals, 87 Accuracy, 32-34 Brightness in images, 387-391 Additivity, 89-91, 185-187 Butterfly calculation in FFT, 231-232 Algebraic reconstruction technique (ART), Butterworth filter. See under Filters 444-445 Aliasing C program, 67, 77, 520 frequency domain, 196-200, 212-214, Cascaded stages, 96, 133. See also under 220-222, 372 Filters- recursive in sampling, 39-45 Caruso, restoration of recordings by, 304-307 sinc function, equation for aliased, 212-214 CAT scanner. See Computed tomography time domain, 194-196, 300 Causal signals and systems, 130 Alternating current (AC), defined, 14 CCD. See Charge coupled device Amplitude modulation (AM), 204-206, Central limit theorem, 30, 135-136, 407 216-217, 370 Cepstrum, 371 Analysis equations. See under Fourier Charge coupled device (CCD), 381-385, transform 430-432 Antialias filter. See under filters- analog Charge sensitive amplifier, in CCD, 382-384 Arithmetic encoding, 486 Chebyshev filter. See under Filters Artificial neural net, 458. See also Neural Chirp signals and systems, 222-224 network Chrominance signal, in television, 386 Artificial reverberation in music, 5 Circular buffer, 507 ASCII codes, table of, 484 Circularity. See under Discrete Fourier Aspect ratio of television, 386 transform Assembly program, 76-77, 520 Classifiers, 458 Astrophotography, 1, 10, 373-375, 394-396 Close neighbors in images, 439 Audio processing, 5-7, 304-307, 311, 351-372 Closing, morphological, 437 Audio signaling tones, detection of, 293 Coefficient of variation (CV), 17 Automatic gain control (AGC), 370 Color, 376, 379-381, 386 Compact laser disc (CD), 359-362 Backprojection, 446-450 Complex logarithm, 372 Basis functions Complex numbers discrete Fourier transform, 150-152, addition, 553-554 158-159 associative property, 554 discrete cosine transform, 496-497 commutative property, 5054 Bessel filter. -
Tektronix Signal Generator
Signal Generator Fundamentals Signal Generator Fundamentals Table of Contents The Complete Measurement System · · · · · · · · · · · · · · · 5 Complex Waves · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 The Signal Generator · · · · · · · · · · · · · · · · · · · · · · · · · · · · 6 Signal Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Analog or Digital? · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 7 Analog Modulation · · · · · · · · · · · · · · · · · · · · · · · · · 15 Basic Signal Generator Applications· · · · · · · · · · · · · · · · 8 Digital Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Verification · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Frequency Sweep · · · · · · · · · · · · · · · · · · · · · · · · · · · 16 Testing Digital Modulator Transmitters and Receivers · · 8 Quadrature Modulation · · · · · · · · · · · · · · · · · · · · · 16 Characterization · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Digital Patterns and Formats · · · · · · · · · · · · · · · · · · · 16 Testing D/A and A/D Converters · · · · · · · · · · · · · · · · · 8 Bit Streams · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 17 Stress/Margin Testing · · · · · · · · · · · · · · · · · · · · · · · · · · · 9 Types of Signal Generators · · · · · · · · · · · · · · · · · · · · · · 17 Stressing Communication Receivers · · · · · · · · · · · · · · 9 Analog and Mixed Signal Generators · · · · · · · · · · · · · · 18 Signal Generation Techniques -
Laboratory Manual
DEPARTMENT OF ELECTRICAL & COMPUTER ENGINEERING EEL 4515 FUNDAMENTALS OF DIGITAL COMMUNICATION LABORATORY MANUAL Revised August 2018 Table of Content • Safety Guidelines • Lab instructions • Troubleshooting hints • Experiment 1: Time Division Multiplexing 1 • Experiment 2: Pulse Code Modulation 5 • Experiment 3: Delta Modulation 15 • Experiment 4: Line Coding (Manchester) 21 • Experiment 5: Frequency Shift Keying 25 • Experiment 6: Phase Shift Keying 33 • Experiment 7: Matlab Project 40 Safety Rules and Operating Procedures 1. Note the location of the Emergency Disconnect (red button near the door) to shut off power in an emergency. Note the location of the nearest telephone (map on bulletin board). 2. Students are allowed in the laboratory only when the instructor is present. 3. Open drinks and food are not allowed near the lab benches. 4. Report any broken equipment or defective parts to the lab instructor. Do not open, remove the cover, or attempt to repair any equipment. 5. When the lab exercise is over, all instruments, except computers, must be turned off. Return substitution boxes to the designated location. Your lab grade will be affected if your laboratory station is not tidy when you leave. 6. University property must not be taken from the laboratory. 7. Do not move instruments from one lab station to another lab station. 8. Do not tamper with or remove security straps, locks, or other security devices. Do not disable or attempt to defeat the security camera. ANYONE VIOLATING ANY RULES OR REGULATIONS MAY BE DENIED ACCESS TO THESE FACILITIES. I have read and understand these rules and procedures. I agree to abide by these rules and procedures at all times while using these facilities. -
Oscilators Simplified
SIMPLIFIED WITH 61 PROJECTS DELTON T. HORN SIMPLIFIED WITH 61 PROJECTS DELTON T. HORN TAB BOOKS Inc. Blue Ridge Summit. PA 172 14 FIRST EDITION FIRST PRINTING Copyright O 1987 by TAB BOOKS Inc. Printed in the United States of America Reproduction or publication of the content in any manner, without express permission of the publisher, is prohibited. No liability is assumed with respect to the use of the information herein. Library of Cangress Cataloging in Publication Data Horn, Delton T. Oscillators simplified, wtth 61 projects. Includes index. 1. Oscillators, Electric. 2, Electronic circuits. I. Title. TK7872.07H67 1987 621.381 5'33 87-13882 ISBN 0-8306-03751 ISBN 0-830628754 (pbk.) Questions regarding the content of this book should be addressed to: Reader Inquiry Branch Editorial Department TAB BOOKS Inc. P.O. Box 40 Blue Ridge Summit, PA 17214 Contents Introduction vii List of Projects viii 1 Oscillators and Signal Generators 1 What Is an Oscillator? - Waveforms - Signal Generators - Relaxatton Oscillators-Feedback Oscillators-Resonance- Applications--Test Equipment 2 Sine Wave Oscillators 32 LC Parallel Resonant Tanks-The Hartfey Oscillator-The Coipltts Oscillator-The Armstrong Oscillator-The TITO Oscillator-The Crystal Oscillator 3 Other Transistor-Based Signal Generators 62 Triangle Wave Generators-Rectangle Wave Generators- Sawtooth Wave Generators-Unusual Waveform Generators 4 UJTS 81 How a UJT Works-The Basic UJT Relaxation Oscillator-Typical Design Exampl&wtooth Wave Generators-Unusual Wave- form Generator 5 Op Amp Circuits -

Fourier Transforms
Fourier Transforms Mark Handley Fourier Series Any periodic function can be expressed as the sum of a series of sines and cosines (or varying amplitides) 1 Square Wave Frequencies: f Frequencies: f + 3f Frequencies: f + 3f + 5f Frequencies: f + 3f + 5f + … + 15f Sawtooth Wave Frequencies: f Frequencies: f + 2f Frequencies: f + 2f + 3f Frequencies: f + 2f + 3f + … + 8f 2 Fourier Series A function f(x) can be expressed as a series of sines and cosines: where: Fourier Transform Fourier Series can be generalized to complex numbers, and further generalized to derive the Fourier Transform. Forward Fourier Transform: Inverse Fourier Transform: Note: 3 Fourier Transform Fourier Transform maps a time series (eg audio samples) into the series of frequencies (their amplitudes and phases) that composed the time series. Inverse Fourier Transform maps the series of frequencies (their amplitudes and phases) back into the corresponding time series. The two functions are inverses of each other. Discrete Fourier Transform If we wish to find the frequency spectrum of a function that we have sampled, the continuous Fourier Transform is not so useful. We need a discrete version: Discrete Fourier Transform 4 Discrete Fourier Transform Forward DFT: The complex numbers f0 … fN are transformed into complex numbers F0 … Fn Inverse DFT: The complex numbers F0 … Fn are transformed into complex numbers f0 … fN DFT Example Interpreting a DFT can be slightly difficult, because the DFT of real data includes complex numbers. Basically: The magnitude of the complex number for a DFT component is the power at that frequency. The phase θ of the waveform can be determined from the relative values of the real and imaginary coefficents. -
Tooth Wave Supplied to One Deflection Axis of 50 Field of Search
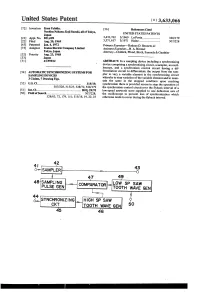
United States Patent (11) 3,633,066 72) Inventors Kozo Uchida; Naohisa Nakaya; Koji Suzuki, all of Tokyo, 56 References Cited Japan UNITED STATES PATENTS (21) Appl. No. 851,609 3,432,762 3/1969 La Porta....................... 328/179 22) Fied Aug. 20, 1969 3,571,617 3/1971 Hainz........................... 307/228 45) Patented Jan. 4, 1972 Primary Examiner-Rodney D. Bennett, Jr. 73 Assignee Iwatsu Electric Company Limited Assistant Examiner-H. A. Birmiel Tokyo, Japan Attorney-Chittick, Pfund, Birch, Samuels & Gauthier 32) Priority Aug. 23, 1968 33 Japan 31) 43/59922 ABSTRACT: In a sampling device including a synchronizing device comprising a synchronizing circuit, a sampler, an oscil loscope, and a synchronism control circuit having a dif 54) AUTOMATICSYNCHRONIZING SYSTEMSFOR ferentiation circuit to differentiate the output from the sam SAMPLNG EDEVICES pler to vary a variable element in the synchronizing circuit whereby to stop variation of the variable element and to main 3 Claims, 7 Drawing Figs. tain the same in the stopped condition upon reaching 52) U.S.C........................................................ 315/19, synchronism there is provided means to stop the operation of 307/228, 315125,328/72,328/179 the synchronism control circuit over the flyback interval of a (51) Int. Cl......................................................... H01j29/70 low-speed sawtooth wave supplied to one deflection axis of 50 Field of Search............................................ 307/228; the oscilloscope to prevent loss of synchronization which 328/63, 72, 179, 151; 315/18, 19, 22, 25 otherwise tends to occur during the flyback interval. LOW SP SAW 48SAMPLNGPULSE GEN COMPARATOR TOOTH WAVE GEN SYNCHRONIZING HGH SP SAW CKT TOOTH WAVE GEN 46 PATENTEDIAN 4972 3,633,066 SHEET 1 OF 2 - - - - - - - - - - was - - - - - - - - - - - - - -- a-- - - - F. -

Digital Transmission Is the Transmittal of Digital Signals Between Two Or More Points in a Communications System
Shri Vishnu Engineering College for Women :: Bhimavaram Department of Electronics & Communication Engineering Digital Communication UNIT I PULSE DIGITAL MODULATION Digital Transmission is the transmittal of digital signals between two or more points in a communications system. The signals can be binary or any other form of discrete-level digital pulses. Digital pulses can not be propagated through a wireless transmission system such as earth’s atmosphere or free space. Alex H. Reeves developed the first digital transmission system in 1937 at the Paris Laboratories of AT & T for the purpose of carrying digitally encoded analog signals, such as the human voice, over metallic wire cables between telephone offices. Advantages & disadvantages of Digital Transmission Advantages --Noise immunity --Multiplexing(Time domain) --Regeneration --Simple to evaluate and measure Disadvantages --Requires more bandwidth --Additional encoding (A/D) and decoding (D/A) circuitry Pulse Modulation --Pulse modulation consists essentially of sampling analog information signals and then converting those samples into discrete pulses and transporting the pulses from a source to a destination over a physical transmission medium. --The four predominant methods of pulse modulation: 1) pulse width modulation (PWM) 2) pulse position modulation (PPM) 3) pulse amplitude modulation (PAM) 4) pulse code modulation (PCM). Pulse Width Modulation --PWM is sometimes called pulse duration modulation (PDM) or pulse length modulation (PLM), as the width (active portion of the duty cycle) of a constant amplitude pulse is varied proportional to the amplitude of the analog signal at the time the signal is sampled. --The maximum analog signal amplitude produces the widest pulse, and the minimum analog signal amplitude produces the narrowest pulse.