On the Implicit Equation of Conics and Quadrics Offsets
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 11. Three Dimensional Analytic Geometry and Vectors
Chapter 11. Three dimensional analytic geometry and vectors. Section 11.5 Quadric surfaces. Curves in R2 : x2 y2 ellipse + =1 a2 b2 x2 y2 hyperbola − =1 a2 b2 parabola y = ax2 or x = by2 A quadric surface is the graph of a second degree equation in three variables. The most general such equation is Ax2 + By2 + Cz2 + Dxy + Exz + F yz + Gx + Hy + Iz + J =0, where A, B, C, ..., J are constants. By translation and rotation the equation can be brought into one of two standard forms Ax2 + By2 + Cz2 + J =0 or Ax2 + By2 + Iz =0 In order to sketch the graph of a quadric surface, it is useful to determine the curves of intersection of the surface with planes parallel to the coordinate planes. These curves are called traces of the surface. Ellipsoids The quadric surface with equation x2 y2 z2 + + =1 a2 b2 c2 is called an ellipsoid because all of its traces are ellipses. 2 1 x y 3 2 1 z ±1 ±2 ±3 ±1 ±2 The six intercepts of the ellipsoid are (±a, 0, 0), (0, ±b, 0), and (0, 0, ±c) and the ellipsoid lies in the box |x| ≤ a, |y| ≤ b, |z| ≤ c Since the ellipsoid involves only even powers of x, y, and z, the ellipsoid is symmetric with respect to each coordinate plane. Example 1. Find the traces of the surface 4x2 +9y2 + 36z2 = 36 1 in the planes x = k, y = k, and z = k. Identify the surface and sketch it. Hyperboloids Hyperboloid of one sheet. The quadric surface with equations x2 y2 z2 1. -

Pencils of Quadrics
Europ. J. Combinatorics (1988) 9, 255-270 Intersections in Projective Space II: Pencils of Quadrics A. A. BRUEN AND J. w. P. HIRSCHFELD A complete classification is given of pencils of quadrics in projective space of three dimensions over a finite field, where each pencil contains at least one non-singular quadric and where the base curve is not absolutely irreducible. This leads to interesting configurations in the space such as partitions by elliptic quadrics and by lines. 1. INTRODUCTION A pencil of quadrics in PG(3, q) is non-singular if it contains at least one non-singular quadric. The base of a pencil is a quartic curve and is reducible if over some extension of GF(q) it splits into more than one component: four lines, two lines and a conic, two conics, or a line and a twisted cubic. In order to contain no points or to contain some line over GF(q), the base is necessarily reducible. In the main part of this paper a classification is given of non-singular pencils ofquadrics in L = PG(3, q) with a reducible base. This leads to geometrically interesting configur ations obtained from elliptic and hyperbolic quadrics, such as spreads and partitions of L. The remaining part of the paper deals with the case when the base is not reducible and is therefore a rational or elliptic quartic. The number of points in the elliptic case is then governed by the Hasse formula. However, we are able to derive an interesting combi natorial relationship, valid also in higher dimensions, between the number of points in the base curve and the number in the base curve of a dual pencil. -

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

A Brief Tour of Vector Calculus
A BRIEF TOUR OF VECTOR CALCULUS A. HAVENS Contents 0 Prelude ii 1 Directional Derivatives, the Gradient and the Del Operator 1 1.1 Conceptual Review: Directional Derivatives and the Gradient........... 1 1.2 The Gradient as a Vector Field............................ 5 1.3 The Gradient Flow and Critical Points ....................... 10 1.4 The Del Operator and the Gradient in Other Coordinates*............ 17 1.5 Problems........................................ 21 2 Vector Fields in Low Dimensions 26 2 3 2.1 General Vector Fields in Domains of R and R . 26 2.2 Flows and Integral Curves .............................. 31 2.3 Conservative Vector Fields and Potentials...................... 32 2.4 Vector Fields from Frames*.............................. 37 2.5 Divergence, Curl, Jacobians, and the Laplacian................... 41 2.6 Parametrized Surfaces and Coordinate Vector Fields*............... 48 2.7 Tangent Vectors, Normal Vectors, and Orientations*................ 52 2.8 Problems........................................ 58 3 Line Integrals 66 3.1 Defining Scalar Line Integrals............................. 66 3.2 Line Integrals in Vector Fields ............................ 75 3.3 Work in a Force Field................................. 78 3.4 The Fundamental Theorem of Line Integrals .................... 79 3.5 Motion in Conservative Force Fields Conserves Energy .............. 81 3.6 Path Independence and Corollaries of the Fundamental Theorem......... 82 3.7 Green's Theorem.................................... 84 3.8 Problems........................................ 89 4 Surface Integrals, Flux, and Fundamental Theorems 93 4.1 Surface Integrals of Scalar Fields........................... 93 4.2 Flux........................................... 96 4.3 The Gradient, Divergence, and Curl Operators Via Limits* . 103 4.4 The Stokes-Kelvin Theorem..............................108 4.5 The Divergence Theorem ...............................112 4.6 Problems........................................114 List of Figures 117 i 11/14/19 Multivariate Calculus: Vector Calculus Havens 0. -

Elements of Chapter 9: Nonlinear Systems Examples
Elements of Chapter 9: Nonlinear Systems To solve x0 = Ax, we use the ansatz that x(t) = eλtv. We found that λ is an eigenvalue of A, and v an associated eigenvector. We can also summarize the geometric behavior of the solutions by looking at a plot- However, there is an easier way to classify the stability of the origin (as an equilibrium), To find the eigenvalues, we compute the characteristic equation: p Tr(A) ± ∆ λ2 − Tr(A)λ + det(A) = 0 λ = 2 which depends on the discriminant ∆: • ∆ > 0: Real λ1; λ2. • ∆ < 0: Complex λ = a + ib • ∆ = 0: One eigenvalue. The type of solution depends on ∆, and in particular, where ∆ = 0: ∆ = 0 ) 0 = (Tr(A))2 − 4det(A) This is a parabola in the (Tr(A); det(A)) coordinate system, inside the parabola is where ∆ < 0 (complex roots), and outside the parabola is where ∆ > 0. We can then locate the position of our particular trace and determinant using the Poincar´eDiagram and it will tell us what the stability will be. Examples Given the system where x0 = Ax for each matrix A below, classify the origin using the Poincar´eDiagram: 1 −4 1. 4 −7 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = −6 Det(A) = −7 + 16 = 9 ∆ = 36 − 4 · 9 = 0 Therefore, we have a \degenerate sink" at the origin. 1 2 2. −5 −1 SOLUTION: Compute the trace, determinant and discriminant: Tr(A) = 0 Det(A) = −1 + 10 = 9 ∆ = 02 − 4 · 9 = −36 The origin is a center. 1 3. Given the system x0 = Ax where the matrix A depends on α, describe how the equilibrium solution changes depending on α (use the Poincar´e Diagram): 2 −5 (a) α −2 SOLUTION: The trace is 0, so that puts us on the \det(A)" axis. -

Quadric Surfaces
Quadric Surfaces SUGGESTED REFERENCE MATERIAL: As you work through the problems listed below, you should reference Chapter 11.7 of the rec- ommended textbook (or the equivalent chapter in your alternative textbook/online resource) and your lecture notes. EXPECTED SKILLS: • Be able to compute & traces of quadic surfaces; in particular, be able to recognize the resulting conic sections in the given plane. • Given an equation for a quadric surface, be able to recognize the type of surface (and, in particular, its graph). PRACTICE PROBLEMS: For problems 1-9, use traces to identify and sketch the given surface in 3-space. 1. 4x2 + y2 + z2 = 4 Ellipsoid 1 2. −x2 − y2 + z2 = 1 Hyperboloid of 2 Sheets 3. 4x2 + 9y2 − 36z2 = 36 Hyperboloid of 1 Sheet 4. z = 4x2 + y2 Elliptic Paraboloid 2 5. z2 = x2 + y2 Circular Double Cone 6. x2 + y2 − z2 = 1 Hyperboloid of 1 Sheet 7. z = 4 − x2 − y2 Circular Paraboloid 3 8. 3x2 + 4y2 + 6z2 = 12 Ellipsoid 9. −4x2 − 9y2 + 36z2 = 36 Hyperboloid of 2 Sheets 10. Identify each of the following surfaces. (a) 16x2 + 4y2 + 4z2 − 64x + 8y + 16z = 0 After completing the square, we can rewrite the equation as: 16(x − 2)2 + 4(y + 1)2 + 4(z + 2)2 = 84 This is an ellipsoid which has been shifted. Specifically, it is now centered at (2; −1; −2). (b) −4x2 + y2 + 16z2 − 8x + 10y + 32z = 0 4 After completing the square, we can rewrite the equation as: −4(x − 1)2 + (y + 5)2 + 16(z + 1)2 = 37 This is a hyperboloid of 1 sheet which has been shifted. -

Section 6.2 Introduction to Conics: Parabolas 103
Section 6.2 Introduction to Conics: Parabolas 103 Course Number Section 6.2 Introduction to Conics: Parabolas Instructor Objective: In this lesson you learned how to write the standard form of the equation of a parabola. Date Important Vocabulary Define each term or concept. Directrix A fixed line in the plane from which each point on a parabola is the same distance as the distance from the point to a fixed point in the plane. Focus A fixed point in the plane from which each point on a parabola is the same distance as the distance from the point to a fixed line in the plane. Focal chord A line segment that passes through the focus of a parabola and has endpoints on the parabola. Latus rectum The specific focal chord perpendicular to the axis of a parabola. Tangent A line is tangent to a parabola at a point on the parabola if the line intersects, but does not cross, the parabola at the point. I. Conics (Page 433) What you should learn How to recognize a conic A conic section, or conic, is . the intersection of a plane as the intersection of a and a double-napped cone. plane and a double- napped cone Name the four basic conic sections: circle, ellipse, parabola, and hyperbola. In the formation of the four basic conics, the intersecting plane does not pass through the vertex of the cone. When the plane does pass through the vertex, the resulting figure is a(n) degenerate conic , such as . a point, a line, or a pair of intersecting lines. -

Polynomials and Quadratics
Higher hsn .uk.net Mathematics UNIT 2 OUTCOME 1 Polynomials and Quadratics Contents Polynomials and Quadratics 64 1 Quadratics 64 2 The Discriminant 66 3 Completing the Square 67 4 Sketching Parabolas 70 5 Determining the Equation of a Parabola 72 6 Solving Quadratic Inequalities 74 7 Intersections of Lines and Parabolas 76 8 Polynomials 77 9 Synthetic Division 78 10 Finding Unknown Coefficients 82 11 Finding Intersections of Curves 84 12 Determining the Equation of a Curve 86 13 Approximating Roots 88 HSN22100 This document was produced specially for the HSN.uk.net website, and we require that any copies or derivative works attribute the work to Higher Still Notes. For more details about the copyright on these notes, please see http://creativecommons.org/licenses/by-nc-sa/2.5/scotland/ Higher Mathematics Unit 2 – Polynomials and Quadratics OUTCOME 1 Polynomials and Quadratics 1 Quadratics A quadratic has the form ax2 + bx + c where a, b, and c are any real numbers, provided a ≠ 0 . You should already be familiar with the following. The graph of a quadratic is called a parabola . There are two possible shapes: concave up (if a > 0 ) concave down (if a < 0 ) This has a minimum This has a maximum turning point turning point To find the roots (i.e. solutions) of the quadratic equation ax2 + bx + c = 0, we can use: factorisation; completing the square (see Section 3); −b ± b2 − 4 ac the quadratic formula: x = (this is not given in the exam). 2a EXAMPLES 1. Find the roots of x2 −2 x − 3 = 0 . -

Quadric Surfaces
Quadric Surfaces Six basic types of quadric surfaces: • ellipsoid • cone • elliptic paraboloid • hyperboloid of one sheet • hyperboloid of two sheets • hyperbolic paraboloid (A) (B) (C) (D) (E) (F) 1. For each surface, describe the traces of the surface in x = k, y = k, and z = k. Then pick the term from the list above which seems to most accurately describe the surface (we haven't learned any of these terms yet, but you should be able to make a good educated guess), and pick the correct picture of the surface. x2 y2 (a) − = z. 9 16 1 • Traces in x = k: parabolas • Traces in y = k: parabolas • Traces in z = k: hyperbolas (possibly a pair of lines) y2 k2 Solution. The trace in x = k of the surface is z = − 16 + 9 , which is a downward-opening parabola. x2 k2 The trace in y = k of the surface is z = 9 − 16 , which is an upward-opening parabola. x2 y2 The trace in z = k of the surface is 9 − 16 = k, which is a hyperbola if k 6= 0 and a pair of lines (a degenerate hyperbola) if k = 0. This surface is called a hyperbolic paraboloid , and it looks like picture (E) . It is also sometimes called a saddle. x2 y2 z2 (b) + + = 1. 4 25 9 • Traces in x = k: ellipses (possibly a point) or nothing • Traces in y = k: ellipses (possibly a point) or nothing • Traces in z = k: ellipses (possibly a point) or nothing y2 z2 k2 k2 Solution. The trace in x = k of the surface is 25 + 9 = 1− 4 . -
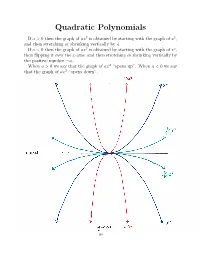
Quadratic Polynomials
Quadratic Polynomials If a>0thenthegraphofax2 is obtained by starting with the graph of x2, and then stretching or shrinking vertically by a. If a<0thenthegraphofax2 is obtained by starting with the graph of x2, then flipping it over the x-axis, and then stretching or shrinking vertically by the positive number a. When a>0wesaythatthegraphof− ax2 “opens up”. When a<0wesay that the graph of ax2 “opens down”. I Cit i-a x-ax~S ~12 *************‘s-aXiS —10.? 148 2 If a, c, d and a = 0, then the graph of a(x + c) 2 + d is obtained by If a, c, d R and a = 0, then the graph of a(x + c)2 + d is obtained by 2 R 6 2 shiftingIf a, c, the d ⇥ graphR and ofaax=⇤ 2 0,horizontally then the graph by c, and of a vertically(x + c) + byd dis. obtained (Remember by shiftingshifting the the⇥ graph graph of of axax⇤ 2 horizontallyhorizontally by by cc,, and and vertically vertically by by dd.. (Remember (Remember thatthatd>d>0meansmovingup,0meansmovingup,d<d<0meansmovingdown,0meansmovingdown,c>c>0meansmoving0meansmoving thatleft,andd>c<0meansmovingup,0meansmovingd<right0meansmovingdown,.) c>0meansmoving leftleft,and,andc<c<0meansmoving0meansmovingrightright.).) 2 If a =0,thegraphofafunctionf(x)=a(x + c) 2+ d is called a parabola. If a =0,thegraphofafunctionf(x)=a(x + c)2 + d is called a parabola. 6 2 TheIf a point=0,thegraphofafunction⇤ ( c, d) 2 is called thefvertex(x)=aof(x the+ c parabola.) + d is called a parabola. The point⇤ ( c, d) R2 is called the vertex of the parabola. -

Stable Rationality of Quadric and Cubic Surface Bundle Fourfolds
STABLE RATIONALITY OF QUADRIC AND CUBIC SURFACE BUNDLE FOURFOLDS ASHER AUEL, CHRISTIAN BOHNING,¨ AND ALENA PIRUTKA Abstract. We study the stable rationality problem for quadric and cubic surface bundles over surfaces from the point of view of the degeneration method for the Chow group of 0-cycles. Our main result is that a very general hypersurface X of bidegree (2, 3) in P2 × P3 is not stably rational. Via projections onto the two factors, X → P2 is a cubic surface bundle and X → P3 is a conic bundle, and we analyze the stable rationality problem from both these points of view. Also, 2 we introduce, for any n ≥ 4, new quadric surface bundle fourfolds Xn → P with 2 discriminant curve Dn ⊂ P of degree 2n, such that Xn has nontrivial unramified Brauer group and admits a universally CH0-trivial resolution. 1. Introduction An integral variety X over a field k is stably rational if X Pm is rational, for some m. In recent years, failure of stable rationality has been× established for many classes of smooth rationally connected projective complex varieties, see, for instance [1, 3, 4, 7, 15, 16, 22, 23, 24, 25, 26, 27, 28, 29, 30, 33, 34, 36, 37]. These results were obtained by the specialization method, introduced by C. Voisin [37] and developed in [16]. In many applications, one uses this method in the following form. For simplicity, assume that k is an uncountable algebraically closed field and consider a quasi-projective integral scheme B over k and a generically smooth projective morphism B with positive dimensional fibers. -

The Determinant and the Discriminant
CHAPTER 2 The determinant and the discriminant In this chapter we discuss two indefinite quadratic forms: the determi- nant quadratic form det(a, b, c, d)=ad bc, − and the discriminant disc(a, b, c)=b2 4ac. − We will be interested in the integral representations of a given integer n by either of these, that is the set of solutions of the equations 4 ad bc = n, (a, b, c, d) Z − 2 and 2 3 b ac = n, (a, b, c) Z . − 2 For q either of these forms, we denote by Rq(n) the set of all such represen- tations. Consider the three basic questions of the previous chapter: (1) When is Rq(n) non-empty ? (2) If non-empty, how large Rq(n)is? (3) How is the set Rq(n) distributed as n varies ? In a suitable sense, a good portion of the answers to these question will be similar to the four and three square quadratic forms; but there will be major di↵erences coming from the fact that – det and disc are indefinite quadratic forms (have signature (2, 2) and (2, 1) over the reals), – det and disc admit isotropic vectors: there exist x Q4 (resp. Q3) such that det(x)=0(resp.disc(x) = 0). 2 1. Existence and number of representations by the determinant As the name suggest, determining Rdet(n) is equivalent to determining the integral 2 2 matrices of determinant n: ⇥ (n) ab Rdet(n) M (Z)= g = M2(Z), det(g)=n . ' 2 { cd 2 } ✓ ◆ n 0 Observe that the diagonal matrix a = has determinant n, and any 01 ✓ ◆ other matrix in the orbit SL2(Z).a is integral and has the same determinant.