Modeling and Data-Driven Parameter Estimationfor Woven Fabrics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Natural Materials for the Textile Industry Alain Stout
English by Alain Stout For the Textile Industry Natural Materials for the Textile Industry Alain Stout Compiled and created by: Alain Stout in 2015 Official E-Book: 10-3-3016 Website: www.TakodaBrand.com Social Media: @TakodaBrand Location: Rotterdam, Holland Sources: www.wikipedia.com www.sensiseeds.nl Translated by: Microsoft Translator via http://www.bing.com/translator Natural Materials for the Textile Industry Alain Stout Table of Contents For Word .............................................................................................................................. 5 Textile in General ................................................................................................................. 7 Manufacture ....................................................................................................................... 8 History ................................................................................................................................ 9 Raw materials .................................................................................................................... 9 Techniques ......................................................................................................................... 9 Applications ...................................................................................................................... 10 Textile trade in Netherlands and Belgium .................................................................... 11 Textile industry ................................................................................................................... -

Guide to the Preparation of an Area of Distribution Manual. INSTITUTION Clemson Univ., S.C
DOCUMENT RESUME ID 087 919 CB 001 018 AUTHOR Hayes, Philip TITLE Guide to the Preparation of an Area of Distribution Manual. INSTITUTION Clemson Univ., S.C. Vocational Education Media Center.; South Carolina State Dept. of Education, Columbia. Office of Vocational Education. PUB DATE 72 NOTE 100p. EDRS PRICE MF-$0.75 HC-$4.20 DESCRIPTORS Business Education; Clothing Design; *Distributive Education; *Guides; High School Curriculum; Manuals; Student Developed Materials; *Student Projects IDENTIFIERS *Career Awareness; South Carolina ABSTRACT This semester-length guide for high school distributive education students is geared to start the student thinking about the vocation he would like to enter by exploring one area of interest in marketing and distribution and then presenting the results in a research paper known as an area of distribution manual. The first 25 pages of this document pertain to procedures to follow in writing a manual, rules for entering manuals in national Distributive Education Clubs of America competition, and some summary sheet examples of State winners that were entered at the 25th National DECA Leadership Conference. The remaining 75 pages are an example of an area of distribution manual on "How Fashion Changes Relate to Fashion Designing As a Career," which was a State winner and also a national finalist. In the example manual, the importance of fashion in the economy, the large role fashion plays in the clothing industry, the fast change as well as the repeating of fashion, qualifications for leadership and entry into the fashion world, and techniques of fabric and color selection are all included to create a comprehensive picture of past, present, and future fashion trends. -

Spring 2016 Collection Lookbook Jackie Rogers
JACKIE ROGERS SPRING 2016 COLLECTION LOOKBOOK JACKIE ROGERS Jackie Rogers’ new collection is an homage to the works of famed artist Salvador Dali, with whom she established a friendship with while she lived in Paris. Jackie who started as a menswear designer at the suggestion of Chanel was inspired by Dali’s works and Rogers uses the artistic motif and iconography in the collection coupled with sumptuous fabrics including gabardine, lamé and silk chiffon to create these unique looks. In addition, the new collection features an expansion of her burlap jackets, which she tailors to the body and creates beautiful structured designs and expands her use of the fabric into ornate dresses that turned the heads of many at the event. As Rogers, often referred to as “America’s Coco Chanel,” likes to say, “I don’t believe in fashion, I believe in style,” and this motto is reflected throughout her latest collection, which is made with the timeless elegance that is the signature of the Jackie Rogers brand. Each Jackie Rogers design makes a statement of sophistication and style with every piece being perfectly tailored to fit the body. When you enter a room, the beauty and craftsmanship of signature a Jackie Rogers design is unmistakable as Rogers uses sewing techniques she perfected while working with Coco Chanel at her Paris studio. Jackie Rogers is conceived, designed and manufactured entirely in New York City in its Midtown showroom and available for purchase in her Southampton, NY and Palm Beach, Florida boutiques as well as at www.jackierogers.com. Hair and makeup by Dion Moore Jose Rosello for Angelo David Salon 2. -

View Resume/Vita
Email: [email protected] LinkedIn : https://www.linkedin.com/in/eulandasanders EDUCATION: 1997 Doctorate of Philosophy Human Resources and Family Sciences, University of Nebraska-Lincoln Dissertation Title: African American Appearance: Cultural Analysis of Slave Women’s Narratives Advisor: Joan Laughlin, Ph.D. 1994 Masters of Arts Design, Merchandising and Consumer Sciences, Colorado State University Thesis Title: AutoCAD for Hand-Knitted Garment Production: Art Deco Design Advisor: Diane Sparks, Ed.D. 1990 Bachelor of Science Apparel and Merchandising, Colorado State University Honors: Cum Laude 1987 Associate of Arts Liberal Arts, Lamar Community College Honors: President’s List and Graduation Student Speaker ACADEMIC POSITIONS: August 2012 - forward Professor and Donna R. Danielson Endowed Professorship in Textiles and Clothing, Department of Apparel, Events and Hospitality Management (AESHM), College of Human Sciences, Iowa State University Current: Teaching 60%, Research/Creative Scholarship 20%, Service 20% Lead the development of the apparel design and product development programs Mentor tenure-track and non-tenure track faculty in apparel design and product development Recruit, mentor, and advise top graduate students into the department Manage the Digital Apparel & Textile Studio (DATS) 1 June 2016 – forward Equity Advisor, College of Human Sciences, Iowa State University Chair the CHS Committee on Diversity, Equity, and Community (DEC) and represents the CHS on the ISU Committee on Diversity Coordinate regularly with -

1931 Annual Report
ANNUAL REPORT OF THE FEDERAL TRADE COMMISSION FOR THE FISCAL YEAR ENDED JUNE 30 1931 UNITED STATES GOVERNMENT PRINTING OFFICE WASHINGTON 1931 For sale by the Superintendent of Documents, Washington. D.C. - - - Price 25 cents (paper cover) FEDERAL TRADE COMMISSION CHARLES W. HUNT, Chairman. WILLIAM E HUMPHREY. CHARLES H. MARCH. EDGAR A. McCulloch. GARLAND S. FERGUSON, Jr. OTIS B. JOHNSON, Secretary. FEDERAL TRADE COMMISSIONER--1915-1931 Name State from which appointed Period of service Joseph E Davies Wisconsin Mar. 16, 1915-Mar. 18, 1918. William J. Harris Georgia Mar. 16, 1915-May 31, 1918. Edward N. Hurley Illinois Mar.16, 1915-Jan. 31, 1917. Will H. Parry Washington Mar.16, 1915-Apr. 21, 1917. George Rublee New Hampshire Mar.16, 1915-May 14, 1916. William B. Colver Minnesota Mar.16, 1917-Sept. 25, 1920. John Franklin Fort New Jersey Mar.16, 1917-Nov. 30, 1919. Victor Murdock Kansas Sept. 4, 1917-Jan. 31, 1924. Huston Thompson Colorado Jan.17, 1919-Sept. 25, 1926. Nelson B. Gaskill New Jersey Feb. 1, 1920-Feb. 24, 1925. John Garland Pollard Virginia Mar. 6, 1925-Sept. 25,1921. John F. Nugent Idaho Jan.15, 1921-Sept. 25, 1927 Vernon W. Van Fleet Indiana June 26, 1922-July 31, 1926. C. W. Hunt Iowa June 16, 1924. William E Humphrey Washington Feb.25, 1925. Abram F. Myers Iowa Aug. 2, 1926-Jan. 15, 1929. Edgar A. McCulloch Arkansas Feb.11, 1927. G. S. Ferguson, Jr North Carolina Nov.14, 1927. Charles H. March Minnesota Feb. 1, 1929. GENERAL OFFICES OF THE COMMISSION 1800 Virginia Avenue, NW., Washington BRANCH OFFICES 608 South Dearborn Street 45 Broadway Chicago New York 544 Market Street 431 Lyon Building San Francisco Seattle II CONTENTS PART I. -
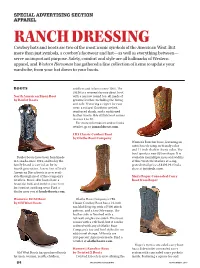
Ranch Dressing Cowboy Hats and Boots Are Two of the Most Iconic Symbols of the American West
SPECIAL ADVERTISING SECTION APPAREL RANCH DRESSING Cowboy hats and boots are two of the most iconic symbols of the American West. But more than just symbols, a cowboy’s footwear and hat—as well as everything between— serve an important purpose. Safety, comfort and style are all hallmarks of Western apparel, and Western Horseman has gathered a fine collection of items to update your wardrobe, from your hat down to your boots. BOOTS toddlers and infants since 1966. The 18150 is a women’s brown short boot North American Bison Boot with a narrow round toe, all made of by Boulet Boots genuine leather, including the lining and sole. Featuring a zipper for easy wear, a natural Goodyear welted, reinforced shank, and a cushioned leather insole, this stylish boot comes in sizes 5 to 10. For more information and to find a retailer, go to jamaoldwest.com. CB3 Classic Cowboy Boot by Olathe Boot Company Women’s Rancher boot, featuring an ostrich neck vamp in Brandy color and 11-inch shaft in Arena color. The boot sports a new SS toe shape. It is Boulet boots have been handmade available in multiple sizes and widths in Canada since 1933, and today the at fine Western retailers at a sug- family brand is carried on by its gested retail price of $309.99. Find a fourth generation. A new line of North store at twistedx.com. American Bison boots is now avail- able through most of the company’s Men’s Roper Concealed Carry retailers. Bison-skin boots have a Boot from Roper beautiful look and mold to your foot for comfort and long wear. -

B.Des. (Fashion Design)
Faculty of Architecture and Planning, Integral University, Lucknow INTEGRAL UNIVERITY, LUCKNOW FACULTY OF ARCHITECTURE AND PLANNING B.Des. (Fashion Design) Scheme of Teaching, Examination & Syllabus (Session 2020-21) Faculty of Architecture and Planning, Integral University, Lucknow INTEGRAL UNIVERSITY, LUCKNOW B. DES. (Fashion Design) SCHEME OF TEACHING AND EXAMINATIONS B.Des.: I Semester w.e.f. 2020 -2021 Continuous Exam Teaching Exam & Subject Subject Assessments Examination Marks Time Subject Name Credits Sessional Code Category Hours/ Periods Marks (Hr) L Tu St/P Total T P/V Total BD101 PC Theory of Design-I 2 1 3 3 50 50 50 100 3 BD102 CF Ergonomics 2 1 3 3 50 50 50 100 3 BD103 CF Civilization Culture & Fashion 1 1 2 2 50 50 50 100 3 BD104 PD Communication skills 1 1 2 2 60 40 40 100 3 BD105 CF Sketching 1 2 3 3 60 40 40 100 - BD106 CF Visualization and Representation-I 1 4 5 3 60 40 40 100 - BD107 CF Model Making/ Workshop 1 3 4 3 60 40 40 100 - BD108 CF Basic Design-I 2 6 8 5 50 50 50 100 3 Total Credit’s Total 11 4 15 30 24 800 GRAND TOTAL Notes: A semester contains approximately of 16 working weeks (90 workdays) each. The examinations of all subjects are conducted at the end of the semester. The viva-voce and practical examinations of subjects are jointly conducted by two examiners: one internal and one external. Abbreviations: L = Lectures; Tu = Tutorial; St/P = Studio/Practical; T = Theory; P/V = Practical/Viva-voce, PC = Professional Core; CF = Core Foundation; DE = Departmental Elective; PD = Professional Development; HS = Human Sciences; AC = Applied Compulsory Course; BS = Building Sciences; OE = Other Departmental Elective; PE = Professional Elective Faculty of Architecture and Planning, Integral University, Lucknow INTEGRAL UNIVERSITY, LUCKNOW B. -

A Digital Textile Printer to Aid in the Product Development Process
FROM CONCEPT TO CREATION: A DIGITAL TEXTILE PRINTER TO AID IN THE PRODUCT DEVELOPMENT PROCESS Dr. Sherry Schofield Dr. Jessica Ridgway Retail, Merchandising and Product Development – College of Human Sciences PROJECT DESCRIPTION The proposed funding from the Student Technology Fee will be used to purchase a wide- format digital ink-jet fabric printer which will provide students the unique opportunity to print their own developed creative ideas using this cutting edge textile printing technology. Our goal with this project is to further integrate current industry technologies into the Retail, Merchandising, and Product Development (RMPD) course curriculum. Within the textile and apparel industry, when a new product is being developed, often the designer is forced to use the available prints that were designed by someone else. This process can limit the designer’s ability to create a truly unique product or garment and to the designer is not able to design from initial concept to final product. Today’s technology is changing this process; with the introduction of digital textile printers, designers can take part in the entire product development process starting with textile design. With the incorporation of a digital printer and the accompanying software into the RMPD textile lab, our students will have the ability to experience a similar concept to product process with the creation of his or her own sample fabric, which could ultimately result in new and unique products. Furthermore, the use of a digital textile printer affords students the ability to incorporate technology into the product development process. This not only emulates current industry practices, but also allows for further exploration in product development. -

PAINT (01) S/S 16 2 3 4 5 6 7 8 9 10 11 12 13 COVER Painted Pants: Silk Organza Woven Top: Silk Woven Top Fixed Trousers with Charmeuse Lace with Eyelets and Tacks
PAINT (01) S/S 16 2 3 4 5 6 7 8 9 10 11 12 13 COVER Painted pants: Silk organza Woven top: Silk woven top fixed trousers with charmeuse lace with eyelets and tacks. closure, front pleats and back patch pockets. Silk trousers: Silk charmeuse trousers with slash pockets and Both jacket and pants painted by front fly closure. Eric Mack. 2/3 Tank with strap: Silk charmeuse Woven dress: Silk and cotton tank with adjustable knotted woven dress in multiple colors straps and grommet detailing. fixed with eyelets and tacks. 12/13 4/5 Slip with strap: Printed silk Cross tee: Cotton silk voile charmeuse slip dress with oversize tee shirt with woven side slit. One charmeuse strap detail. and one cotton twill strap are adjustable and weave through Painted pants: Silk organza grommets in the dress. trousers with charmeuse lace closure, front pleats and ABOUT back patch pockets. Painted by Lucinda Trask created LIKE as 14 Eric Mack. an outlet to share and customize 15 her most personal designs. 6/7 Blue spiral dress: two tone silk The current collection, charmeuse dress with silk piping PAINT (01), is a collaboration and cotton twill tape detail at with Eric Mack. the seams. Long slash closure at back. Contact web: like-clothing.biz 8/9 email: [email protected] Denim jacket: Bleached denim field jacket with patch pockets. CREDITS Photography: Sam Clarke Painted spiral dress: two tone Art direction: Harry Gassel silp charmeuse dress with silk & Eric Mack binding at the neckline, armhole Model: Sasha Jelan and back slash closure. -

Fabric Supplier List
FABRIC SUPPLIER LIST CANADA Kendor Textiles Ltd 1260 Cliveden Ave Delta BC V3M 6Y1 Canada 604.434.3233 [email protected] www.kendortextiles.com Fabrics Available: Fabric supplier. Eco-friendly. Organic. Knits: solids, prints, yarn dyes and warp. Wovens: solids and yarn dyes. End Use: activewear, bottomweights, medical, lingerie, childrenswear, swimwear, rainwear, skiwear and uniform. Natural & eco items include cottons, bamboo's, modals, linens, hemps, organic cottons & organic linens. Technical items include waterproof/breathable soft shells, antibacteric & wicking polyester & recycled polyesters. Is a proud representative of the British Millerain line of waxed cottons and wools, and are able to provide custom souring. Minimums: Carries stock. In-stock minimum: 5 yards/color. Minimum order for production: 10 yards/color. Gordon Fabrics LTD #1135-6900 Graybar Rd. Richmond BC Canada 604.275.2672 [email protected] Fabrics Available: Fabric Supplier. Importer. Jobber. Carries stock. Knits & Wovens: solids, prints, yarn dyes and novelties. End Use: activewear, borromweights, eveningwear/bridal, medical, lingerie and childrenswear. Minimums: In stock minimum 1 yard. Minimum order for production varies. StartUp Fashion Supplier List 2016 – Page 1 CHINA Ecopel (HX) Co., Ltd. China +86 216.767.9686 www.ecopel.cn Fabrics Available: Fake fur and leather garments. End Uses: Childrenswear, Menswear, Other, Womenswear. Minimums: Min. order 50-100 m Hangzhou New Design Source Textile Co., Ltd. China +86 057.182.530528 Fabrics Available: Knits, Polyester/Man-Made, Prints. End Uses: Juniors Fashion, Menswear, Womenswear. Minimums: Min order 50 m. Nantong Haukai Textile Co., Ltd. China +86 513.890.78626 www.huakaitex.com Fabrics Available: Cotton, Linen. End Uses: Corporatewear/Suiting, Menswear, Womenswear. -

Innovation in Textile Effects
Sustainable Textile Technology for High-Performance Water-Repellency Stay Dry – Ecologically 1 Introduction HeiQ is a Swiss specialty textile effects company with 30 employees, 15 nationalities, in 7 countries on 4 continents HeiQ was founded in 2005 as Spin-off of the Swiss Federal Institute of Technology (ETH) HeiQ offers innovation R&D, customized manufacturing and ingredient branding in one HeiQ promotes the product families: 2 HeiQ’s Global Presence HeiQ Direct HeiQ’s Distributors HeiQ’s Warehouses Serving you around the clock! 3 HeiQ Entrepreneurial Spirit 2013 Finalist Swiss of the Year 2011 European Environmental Press Award 2010 Swiss Technology Award 2010 Swiss Equity Fair Winner 2009 Finalist E&Y Entrepreneur Of the Year 2008 KTI Technology Entrepreneur 2007 McKinsey / ETH Venture Prize 2007 Venture Leaders Award 2006 W.A. DeVigier Foundation Award 2006 IMD Startup Award 2005 Siska-Heuberger Prize 4 Repellency Revisited • Durable Water Repellency (DWR) is an essential feature of outdoor apparel • DWR apparel today faces many challenges: • Fluorine phase-out • NGO campaigns • Comfort limitations • Time to revisit assumptions behind DWR • Opportunity to gain market share with fresh approaches CONFIDENTIAL 5 Challenges • Systematic elimination of fluorinated polymers, and telomer surfactants use in textiles. Concern over environmental and health impacts. Potential for bioaccumulation and mammalian toxicity from manufacturing by-products: • PFOA perfluorooctanoic acid • PFOS perfluorooctane sulfonate • Regulatory actions have been rapid and strong: • US EPA: Phase out of PFOA and PFOS fluorinated substances by 2015 • EU: PFOS banned since 2008, PFOA is a candidate for SVHC (REACH) • NGO campaigns: Overwhelming pressure for brands to specify fluorine-free treatments. -

The Complete Costume Dictionary
The Complete Costume Dictionary Elizabeth J. Lewandowski The Scarecrow Press, Inc. Lanham • Toronto • Plymouth, UK 2011 Published by Scarecrow Press, Inc. A wholly owned subsidiary of The Rowman & Littlefield Publishing Group, Inc. 4501 Forbes Boulevard, Suite 200, Lanham, Maryland 20706 http://www.scarecrowpress.com Estover Road, Plymouth PL6 7PY, United Kingdom Copyright © 2011 by Elizabeth J. Lewandowski Unless otherwise noted, all illustrations created by Elizabeth and Dan Lewandowski. All rights reserved. No part of this book may be reproduced in any form or by any electronic or mechanical means, including information storage and retrieval systems, without written permission from the publisher, except by a reviewer who may quote passages in a review. British Library Cataloguing in Publication Information Available Library of Congress Cataloging-in-Publication Data Lewandowski, Elizabeth J., 1960– The complete costume dictionary / Elizabeth J. Lewandowski ; illustrations by Dan Lewandowski. p. cm. Includes bibliographical references. ISBN 978-0-8108-4004-1 (cloth : alk. paper) — ISBN 978-0-8108-7785-6 (ebook) 1. Clothing and dress—Dictionaries. I. Title. GT507.L49 2011 391.003—dc22 2010051944 ϱ ™ The paper used in this publication meets the minimum requirements of American National Standard for Information Sciences—Permanence of Paper for Printed Library Materials, ANSI/NISO Z39.48-1992. Printed in the United States of America For Dan. Without him, I would be a lesser person. It is the fate of those who toil at the lower employments of life, to be rather driven by the fear of evil, than attracted by the prospect of good; to be exposed to censure, without hope of praise; to be disgraced by miscarriage or punished for neglect, where success would have been without applause and diligence without reward.