University of Huddersfield Repository
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Brook + Wilder + Taylor + Kovalev
BROOK + WILDER + TAYLOR + KOVALEV MARCH 1 2018 Every week THE AWARD-WINNING WORLD’S BEST FIGHT MAGAZINE EST. 1909 T WWW.BOXINGNEWSONLINE.NE NEVER FORGET Scott Westgarth 1986-2018 9 NO. 74 VOL. £3.49 Est. 1909 WHERE DOES YOUR FAVOURITE BRITISH BOXER RANK? Order today at www.boxingnewsonline.net/shop quoting GBB17 Also available at local newsagents or via the Boxing News app Retail price £7.99 ContMarchen 1, 2018 ts R.I.P SCOTT WESTGARTH 38 Tragedy strikes in a British ring, as 31-year-old loses his life Photos: ACTION IMAGES/ADAM HOLT & ED MULHOLLAND/HBO DON’T MISS HIGHLIGHTS >> 10 BROOK IS BACK >> 4 EDITOR’S LETTER An exclusive interview with Kell, as well This must serve as a wake-up call as a preview of the Rabchenko clash >> 5 GUEST COLUMN >> 16 POWER SURGE A comment from the BBBofC Who will win the world heavyweight title clash between Wilder and Ortiz? >> 26 THE OBSESSION Catching up with Jazza Dickens – >> 20 KEEP ON KRUSHIN’ a man who is addicted to boxing Looking ahead to Kovalev’s collision with his fellow Russian, Mikhalkin >> 30 FIGHT OF THE YEAR! A ringside report from the sensational >> 22 SCOTTISH SUPPORT Srisaket-Estrada super-fly spectacle Taylor prepares to face a late 30 substitute in front of his home fans >> 32 FITTING FINALE Smith sets up a mouth-watering WBSS final with Groves – injury-permitting DOWNLOAD OUR APP TODAY >> 42 AMATEURS For more details visit The Lionhearts head to Liverpool WWW.BOXINGNEWSONLINE.NET/SUBSCRIPTIONS >> 46 60-SECOND INTERVIEW ‘AS I REALLY DEVELOPED IN THE SPORT, I ALWAYS LOOKED UP TO BERNARD -

Unified Rules of Mixed Martial Arts
1st Vice President Secretary Kim Sumbler Alyson Tuley nd 123 William Street, 2 Floor Pmb 228, 902 Arlington Center New York, NY 10038 Ada, OK 74820 (212) 417-5700 (580) 310-0570 [email protected] [email protected] 2nd Vice President President Treasurer Mark Langlais Brian Dunn Trista Robischon 1111 Country Club Road 1313 Farnam St. 4190 Aumsville Highway Se Middletown, CT 06457 Omaha, NE 68102 Salem, OR 97317 (860) 685-8494 (402) 595-1624 (503) 378-8739 [email protected] [email protected] [email protected] Unified Rules of Mixed Martial Arts Scoring: The 10 point must system is defined as follows: All bouts will be evaluated and scored by three judges. The 10-Point Must System will be the standard system of scoring a bout. Under the 10-Point Must Scoring System, 10 points must be awarded to the winner of the round and nine points or less must be awarded to the loser, except for an even round, which is scored (10-10). **** as of 2019 Unified Rules **** Effective Striking/Grappling shall be considered the first priority of round assessments. Effective Aggressiveness is a ‘Plan B’ and should not be considered unless the judge does not see ANY advantage in the Effective Striking/Grappling realm. Cage/Ring Control (‘Plan C’) should only be needed when ALL other criteria are 100% even for both competitors. This will be an extremely rare occurrence. PRIORITIZED CRITERIA: Effective Striking/Grappling “Legal blows that have immediate or cumulative impact with the potential to contribute towards the end of the match with the IMMEDIATE weighing in more heavily than the cumulative impact. -
The Old-Timer
The Old-Timer produced by www.prewarboxing.co.uk Number 1. August 2007 Sid Shields (Glasgow) – active 1911-22 This is the first issue of magazine will concentrate draw equally heavily on this The Old-Timer and it is my instead upon the lesser material in The Old-Timer. intention to produce three lights, the fighters who or four such issues per year. were idols and heroes My prewarboxing website The main purpose of the within the towns and cities was launched in 2003 and magazine is to present that produced them and who since that date I have historical information about were the backbone of the directly helped over one the many thousands of sport but who are now hundred families to learn professional boxers who almost completely more about their boxing were active between 1900 forgotten. There are many ancestors and frequently and 1950. The great thousands of these men and they have helped me to majority of these boxers are if I can do something to learn a lot more about the now dead and I would like preserve the memory of a personal lives of these to do something to ensure few of them then this boxers. One of the most that they, and their magazine will be useful aspects of this exploits, are not forgotten. worthwhile. magazine will be to I hope that in doing so I amalgamate boxing history will produce an interesting By far the most valuable with family history so that and informative magazine. resource available to the the articles and features The Old-Timer will draw modern boxing historian is contained within are made heavily on the many Boxing News magazine more interesting. -
Mendez Gets Workout, Sets up October TV Date
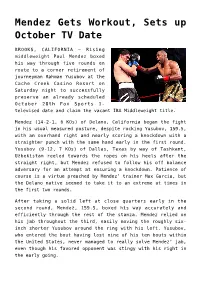
Mendez Gets Workout, Sets up October TV Date BROOKS, CALIFORNIA – Rising middleweight Paul Mendez boxed his way through five rounds en route to a corner retirement of journeyman Rahman Yusubov at the Cache Creek Casino Resort on Saturday night to successfully preserve an already scheduled October 28th Fox Sports 1- televised date and claim the vacant IBA Middleweight title. Mendez (14-2-1, 6 KOs) of Delano, California began the fight in his usual measured posture, despite rocking Yusubov, 159.5, with an overhand right and nearly scoring a knockdown with a straighter punch with the same hand early in the first round. Yusubov (9-12, 7 KOs) of Dallas, Texas by way of Tashkent, Uzbekistan reeled towards the ropes on his heels after the straight right, but Mendez refused to follow his off balance adversary for an attempt at ensuring a knockdown. Patience of course is a virtue preached by Mendez’ trainer Max Garcia, but the Delano native seemed to take it to an extreme at times in the first two rounds. After taking a solid left at close quarters early in the second round, Mendez, 159.5, boxed his way accurately and efficiently through the rest of the stanza. Mendez relied on his jab throughout the third, easily moving the roughly six- inch shorter Yusubov around the ring with his left. Yusubov, who entered the bout having lost nine of his ten bouts within the United States, never managed to really solve Mendez’ jab, even though his favored opponent was stingy with his right in the early going. -

Louisville Ali Park
Nov. 27, 2005------- LOUISVILLE, Ky. ---- Just as the red carpet was going up for the opening of the Muhammad Ali Center, a group of lifelong residents from young Cassius Clay's neighborhood were getting down in Chickasaw Park on the west side of town. The men were gathered around a picnic bench to watch college basketball on a funky TV set with a rope-a-dope antenna. Chickasaw Park is on 61 acres of lush land along the muddy Ohio River. It is the same Ohio River that runs near the downtown Ali Center. It is the same Ohio River into which Ali allegedly threw his 1960 Olympic gold medal after being refused service in a Louisville restaurant. Chickasaw Park was created in 1922 specifically for African-American use. Featuring winding paths and tennis courts, it was one of the last parks designed by Frederick Olmsted, best known for co-designing Central Park in New York. Ali ran through Chickasaw Park as part of his training regimen. He grew up a mile away from the park in a small three-bedroom ranch house at 3302 W. Grand Ave. "Our family lived on Greenwood," said Rodney Noble, 49. "He used to run from 34th and Grand down Greenwood. He would run around this park on the street there are sidewalks today and go back. His goal was to beat the bus. He remains a hero to people here." Added Earl Reed, 44: "I ran the mile. I know he ran the mile. He never ran for distance. He lost a lot of track meets because he was running while shadowboxing." Charles Bundrent looked at the African-American men, who numbered around a dozen. -

AIBA 2020 Medical Rules
AIBA 2020 MEDICAL RULES FOR RINGSIDE DOCTORS Version 2020.10.24 1 Page 1 AIBA 2020 Medical Rules Table of Contents CHAPTER I – Organization / Structure of AIBA ...................................................................................................................... 4 1.1 Introduction of AIBA .................................................................................................................................................. 4 1.2 Governing Structure of AIBA...................................................................................................................................... 4 1.3 Competition Structure of AIBA .................................................................................................................................. 5 1.4 Introduction to AOB ................................................................................................................................................... 5 1.5 Introduction to WSB ................................................................................................................................................... 5 1.6 Comparison between AOB and WSB – Competition Aspects .................................................................................... 6 1.7 Comparison between AOB and WSB – Medical Aspects .......................................................................................... 7 CHAPTER II – AIBA Medical Commission ............................................................................................................................ -

Betting Rules
OPAP SPORTS LTD [email protected] These Rules will take effect from 14/07/2020 CONTENTS Betting Terms:.................................................................................................................................................. 2 1st MODULE .......................................................................................................................................3 GENERAL RULES .................................................................................................................................3 PARTICIPATION IN THE GAMES ...........................................................................................................4 PLACEMENT AND ACCEPTANCE OF BETS .............................................................................................5 RESULTS OF EVENTS ...........................................................................................................................5 CANCELLATION OF BETTING SLIP ........................................................................................................5 REPAYMENT OF WINNING BETTING SLIP .............................................................................................5 MAXIMUM PAY-OUT ..........................................................................................................................7 OBJECTIONS .......................................................................................................................................7 FORCE MAJEURE, LIABILITY OF COMPANY ..........................................................................................8 -
TB2 Manual 1
Manual Version 2.0 INDEX INDEX.........................................................................................................................................2 INTRODUCTION .....................................................................................................................5 THE HOME SCREEN..................................................................................................................5 STARTING A FIGHT...................................................................................................................6 SELECT FIGHTERS TAB........................................................................................................6 SELECT FIGHTER 1/SELECT FIGHTER 2 ..........................................................................6 FIGHTER SUMMARY ..........................................................................................................7 CAREER STAGE .................................................................................................................7 CONDITION.........................................................................................................................7 TRAINER .............................................................................................................................8 CUT MAN ............................................................................................................................8 DESIGNATE ........................................................................................................................8 -

Bookmaker Operational Rules Index Section a 1. Definitions Section B General Rules
BOOKMAKER OPERATIONAL RULES INDEX SECTION A 1. DEFINITIONS SECTION B GENERAL RULES (INCORPORATING HORSERACING, SPORT EVENTS & OTHER CONTINGENCIES) 2. Cut-off time to accept and process bets 3. Collection of winning bets 4. Connected Bet 5. Related Bet 6. Key bet 7. Confidentiality of betting transactions 8. Void bets 9. Possibility to win 10. Bets after official start of a race 11. Acceptance of bets 12. Error 13. Settling 14. Rules for other contingencies SECTION C BETTING RULES FOR HORSERACING 15. Ante post bets 16. Display of odds 17. Betting “with a run” 18. Deductions 19. Postponed races 20. Change of venue or track 21. Dead heats 22 Starting prices and tote odds Page 1 of 24 Approved by WCGRB on 24 April 2008 23. “Open bets” 24. Place betting at fixed odds 25. Races re-run SECTION D BETTING RULES FOR SPORTING EVENTS (OTHER THAN HORSERACING) 26. Application of this section 27. Void bets 28. Soccer (Football) 29. Athletics and Swimming 30. Boxing 31. Cricket 32. Golf 33. Motor racing 34. Rugby 35. American Football 36. Tennis 37. Extreme Fighting 38. Aussie Rules 39. Baseball 40. Basketball 41. Darts 42. Futsal 43. Handball 44. Ice Hockey 45. Snooker 46. Volleyball 47. Cycling SECTION E SPREAD BETTING 48 Betting rules for spread betting 49 Sport provisions Page 2 of 24 Approved by WCGRB on 24 April 2008 INTRODUCTION These rules are applicable to all bookmakers within the Republic of South Africa and seek to ensure uniformity, transparency, fairness and the protection of all participants to wagering transactions SECTION A 1. -

Rules for WBF Sanctioned Championship Contests
WBF World Boxing Foundation Rules for WBF Sanctioned Championship Contests (Amended June 2013) Contents 1. PURPOSE 2 2. DEFINITIONS 2‐3 3. WEIGHT DIVISIONS 3 4. WEIGH‐IN 3‐4 5. PROMOTERS 4 6. CONTESTANTS 4‐5 6.1 General Requirements 4 6.2 Contestant Attire 4‐5 6.3 Jewellery 5 6.4 Hand Wraps 5 6.5 Gloves 5 7. TRAINERS 5‐6 8. TIME KEEPERS 6 8.5 Roll of the Time Keeper 6 8.6 Cessation of a Count 6 9. MEDICAL PRACTITIONER 6 9.2 Pre‐Contest Examination 6 9.3 During the Championship Contest 6 9.4 Post‐Contest Examination 7 9.5 Authority to Stop a Contest 7 9.6 Non‐Fight Periods 7 10. REFEREE 7‐8 10.5 Duties of the Referee During a Bout 8 10.6 Powers of a Referee 8‐9 10.7 Stopping the Contest 9‐10 10.8 Consulting a Medical Practitioner 10 11.JUDGES 10 11.5 Role of a Judge 10 12. SCORING 10 12.1 Points 10‐11 12.2 Judges Decisions 11 12.3 Official Outcomes 11 12.4 The Decision is Final 11‐12 13. WBF TITLE HOLDER OBLIGATIONS 12 14. MISCELLANEOUS 12 APPENDIX 1 ‐ WBF Championship Weight Divisions (Male) 13 APPENDIX 2 – WBF Championship Weight Divisions (Female) 13 1 1. PURPOSE 1.1 The purpose of these Rules is to supplement the requirements of the local Boxing Commission where the WBF Championship Bout is being contested. 1.2 These Rules are issued by the World Boxing Foundation in the interests of safety and integrity of professional boxing anywhere in the world. -

Boxer Died from Injuries in Fight 73 Years Ago," Pittsburgh Post-Gazette, January 28, 2010
SURVIVOR DD/MMM /YEA RESULT RD SURVIVOR AG CITY STATE/CTY/PROV COUNTRY WEIGHT SOURCE/REMARKS CHAMPIONSHIP PRO/ TYPE WHERE CAUSALITY/LEGAL R E AMATEUR/ Richard Teeling 14-May 1725 KO Job Dixon Covent Garden (Pest London England ND London Journal, July 3, 1725; (London) Parker's Penny Post, July 14, 1725; Old Bailey Proceedings Online (www.oldbaileyonline.org), Richard Teeling, Pro Brain injury Ring Blows: Manslaughter Fields) killing: murder, 30th June, 1725. The Proceedings of the Old Bailey Ref: t17250630-26. Covent Garden was a major entertainment district in London. Both men were hackney coachmen. Dixon and another man, John Francis, had fought six or seven minutes. Francis tired, and quit. Dixon challenged anyone else. Teeling accepted. They briefly scuffled, and then Dixon fell and did not get up. He was carried home, where he died next day.The surgeon and apothecary opined that cause of death was either skull fracture or neck fracture. Teeling was convicted of manslaughter, and sentenced to branding. (Branding was on the thumb, with an "M" for murder. The idea was that a person could receive the benefit only once. Branding took place in the courtroom, Richard Pritchard 25-Nov 1725 KO 3 William Fenwick Moorfields London England ND Londonin front of Journal, spectators. February The practice12, 1726; did (London) not end Britishuntil the Journal, early nineteenth February 12,century.) 1726; Old Bailey Proceedings Online (www.oldbaileyonline.org), Richard Pro Brain injury Ring Misadventure Pritchard, killing: murder, 2nd March, 1726. The Proceedings of the Old Bailey Ref: t17260302-96. The men decided to settle a quarrel with a prizefight. -

Cassius Clay Provided By
Nashville Children's Theatre Support for And In This Corner: Cassius Clay provided by By Idris Goodwin Commissioned and originally performed by StageOne Family Theatre, Louisville, KY. Premiered January 19, 2015. February 25 - March 13 About the Play About the Play: And In This Corner: Cassius Clay provides a glimpse into young Cassius Clay’s life during his childhood in Louisville, Kentucky - before he renames himself and becomes the legendary Muhammad Ali. When he is twelve years old, Cassius’ bicycle is stolen. He reports the theft to a police officer named Joe Martin, and angrily insists that he will “whup” whoever stole the bike. In turn, Joe invites him to visit his gym because if fighting is what he wants to do, first he must learn how to fight. Joe recognizes Cassius’ talent and passion, which he redirects into boxing, and Cassius begins spending all of his time at the gym. His hard work and dedication pay off and, after graduating high school, he travels with Joe to the 1960 Rome Olympics, where he defeats the Polish boxer, Zbigniew Pietrzkowski, winning the Olympic Gold medal. The play also serves as a lens through which the audience can understand the laws rulingthe South at the time. Cassius’ best friend, Eddie, is politically-minded and challenges the restrictions imposed on African American citizens throughout the play but it is not until Cassius returns from the Olympics with his gold medal and is refused service in a white diner that Cassius is motivated to also take action. About the Playwright Idris Goodwin is a playwright, poet, rapper, and essayist.