Robotic Rovers Aid Mars Surface Exploration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The IRM the Iron That Binds: the Unexpectedly Strong Magnetism Of
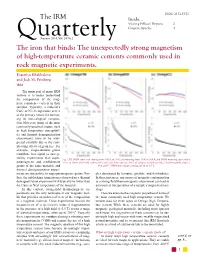
ISSN: 2152-1972 The IRM Inside... Visiting Fellows' Reports 2 Current Articles 4 QuarterlySummer 2014, Vol. 24 No.2 The iron that binds: The unexpectedly strong magnetism of high-temperature ceramic cements commonly used in rock magnetic experiments. Evgeniya Khakhalova and Josh M. Feinberg IRM The main goal of many IRM visitors is to better understand the composition of the mag- netic remanence carriers in their samples. Typically, a material’s Curie or Néel temperature serves as the primary means for estimat- ing its mineralogical composi- tion. However, many of the most commonly used techniques, such as high temperature susceptibil- ity and thermal demagnetization experiments, have to be inter- preted carefully due to the com- plicating effects of grain size. For example, single-domain grains contribute less signal to suscep- tibility experiments than super- Fig 1. RT SIRM curves on cooling from 300 K to 10 K and warming from 10 K to 300 K and SIRM warming curves from paramagnetic and multidomain 10 K to 300 K after field-cooling (FC) and zero-field-cooling (ZFC) of samples (a) Omega700_3, (b) Omega600, and (c) grains of the same material, and OmegaCC. SIRM was imparted using a field of 2.5 T. thermal demagnetization experi- ments are insensitive to superparamagnetic grains. Fur- ples dominated by hematite, goethite, and ferrihydrite). ther, the unblocking temperatures observed in a thermal In these instances, any source of magnetic contamination demagnetization experiment will typically be lower than in a strong-field thermomagnetic experiment can lead to the Curie or Néel temperature of the material. an incorrect interpretation of a sample’s magnetic miner- In this context, strong-field thermomagnetic ex- alogy. -

Meteorites on Mars Observed with the Mars Exploration Rovers C
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 113, E06S22, doi:10.1029/2007JE002990, 2008 Meteorites on Mars observed with the Mars Exploration Rovers C. Schro¨der,1 D. S. Rodionov,2,3 T. J. McCoy,4 B. L. Jolliff,5 R. Gellert,6 L. R. Nittler,7 W. H. Farrand,8 J. R. Johnson,9 S. W. Ruff,10 J. W. Ashley,10 D. W. Mittlefehldt,1 K. E. Herkenhoff,9 I. Fleischer,2 A. F. C. Haldemann,11 G. Klingelho¨fer,2 D. W. Ming,1 R. V. Morris,1 P. A. de Souza Jr.,12 S. W. Squyres,13 C. Weitz,14 A. S. Yen,15 J. Zipfel,16 and T. Economou17 Received 14 August 2007; revised 9 November 2007; accepted 21 December 2007; published 18 April 2008. [1] Reduced weathering rates due to the lack of liquid water and significantly greater typical surface ages should result in a higher density of meteorites on the surface of Mars compared to Earth. Several meteorites were identified among the rocks investigated during Opportunity’s traverse across the sandy Meridiani plains. Heat Shield Rock is a IAB iron meteorite and has been officially recognized as ‘‘Meridiani Planum.’’ Barberton is olivine-rich and contains metallic Fe in the form of kamacite, suggesting a meteoritic origin. It is chemically most consistent with a mesosiderite silicate clast. Santa Catarina is a brecciated rock with a chemical and mineralogical composition similar to Barberton. Barberton, Santa Catarina, and cobbles adjacent to Santa Catarina may be part of a strewn field. Spirit observed two probable iron meteorites from its Winter Haven location in the Columbia Hills in Gusev Crater. -

A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years
A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years Anthony Barrett, Deborah Bass, Sharon Laubach, and Andrew Mishkin Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive M/S 301-260 {firstname.lastname}@jpl.nasa.gov Abstract Over the past five years on Mars, the Mars Exploration Rovers have traveled over 20 kilometers to climb tall hills and descend into craters. Over that period the operations process has continued to evolve as deep introspection by the MER uplink team suggests streamlining improvements and lessons learned adds complexity to handle new problems. As such, the operations process and its supporting tools automate enough of the drudgery to circumvent staff burnout issues while being nimble and safe enough to let an operations staff respond to the problems that Mars throws up on a daily basis. This paper describes the currently used integrated set of planning processes that support rover operations on a daily basis after five years of evolution. Figure 1. Mars Exploration Rover For communications, each rover has a high gain antenna Introduction for receiving instructions from Earth, and a low gain On January 3 & 24, 2004 Spirit and Opportunity, the twin antenna for transmitting data to the Odyssey or Mars Mars Exploration Rovers (MER), landed on opposite sides Reconnaissance orbiters with subsequent relay to Earth. of Mars at Gusev Crater and Meridiani Planum Given that it takes between 6 and 44 minutes for a signal to respectively. Each rover was originally expected to last 90 travel to and from the rovers, simple joystick operations Sols (Martian days) due to dust accumulation on the solar are not feasible. -
2020 Crew Health & Performance EVA Roadmap
NASA/TP-20205007604 Crew Health and Performance Extravehicular Activity Roadmap: 2020 Andrew F. J. Abercromby1 Omar Bekdash4 J. Scott Cupples1 Jocelyn T. Dunn4 E. Lichar Dillon2 Alejandro Garbino3 Yaritza Hernandez4 Alexandros D. Kanelakos1 Christine Kovich5 Emily Matula6 Matthew J. Miller7 James Montalvo6 Jason Norcross4 Cameron W. Pittman7 Sudhakar Rajulu1 Richard A. Rhodes1 Linh Vu8 1NASA Johnson Space Center, Houston, Texas 2University of Texas Medical Branch, Galveston, Texas 3GeoControl Systems Inc., Houston, Texas 4KBR, Houston, Texas 5The Aerospace Corporation, Houston, Texas 6Stinger Ghaffarian Technologies (SGT) Inc., Houston, Texas 7Jacobs Technology, Inc., Houston, Texas 8MEI Technologies, Inc., Houston, Texas National Aeronautics and Space Administration Johnson Space Center Houston, Texas 77058 October 2020 The NASA STI Program Office ... in Profile Since its founding, NASA has been dedicated to the • CONFERENCE PUBLICATION. advancement of aeronautics and space science. The Collected papers from scientific and NASA scientific and technical information (STI) technical conferences, symposia, seminars, program plays a key part in helping NASA or other meetings sponsored or maintain this important role. co-sponsored by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information Officer. technical, or historical information from It collects, organizes, provides for archiving, and NASA programs, projects, and missions, disseminates NASA’s STI. The NASA STI often concerned with subjects having program provides access to the NTRS Registered substantial public interest. and its public interface, the NASA Technical Report Server, thus providing one of the largest • TECHNICAL TRANSLATION. collections of aeronautical and space science STI in English-language translations of foreign the world. Results are published in both non-NASA scientific and technical material pertinent to channels and by NASA in the NASA STI Report NASA’s mission. -
Mars Exploration Rovers: 4 Years on Mars
https://ntrs.nasa.gov/search.jsp?R=20080047431 2019-10-28T16:17:34+00:00Z Mars Exploration Rovers: 4 Years on Mars Geoffrey A. Landis This January, the Mars Exploration Rovers "Spirit" and "Opportunity" are starting their fifth year of exploring the surface of Mars, well over ten times their nominal 90-day design lifetime. This lecture discusses the Mars Exploration Rovers, presents the current mission status for the extended mission, some of the most results from the mission and how it is affecting our current view of Mars, and briefly presents the plans for the coming NASA missions to the surface of Mars and concepts for exploration with robots and humans into the next decade, and beyond. Four Years on Mars: the Mars Exploration Rovers Geoffrey A. Landis NASA John Glenn Research Center http://www.sff.net/people/geoffrey.landis Presentation at MIT Department of Aeronautics and Astronautics, January 18, 2008 Exploration - Landis Mars viewed from the Hubble Space Telescope Exploration - Landis Views of Mars in the early 20th century Lowell 1908 Sciaparelli 1888 Burroughs 1912 (cover painting by Frazetta) Tales of Outer Space ed. Donald A. Wollheim, Ace D-73, 1954 (From Winchell Chung's web page projectrho.com) Exploration - Landis Past Missions to Mars: first close up images of Mars from Mariner 4 Mariner 4 discovered Mars was a barren, moon-like desert Exploration - Landis Viking 1976 Signs of past water on Mars? orbiter Photo from orbit by the 1976 Viking orbiter Exploration - Landis Pathfinder and Sojourner Rover: a solar-powered mission -

Of Curiosity in Gale Crater, and Other Landed Mars Missions
44th Lunar and Planetary Science Conference (2013) 2534.pdf LOCALIZATION AND ‘CONTEXTUALIZATION’ OF CURIOSITY IN GALE CRATER, AND OTHER LANDED MARS MISSIONS. T. J. Parker1, M. C. Malin2, F. J. Calef1, R. G. Deen1, H. E. Gengl1, M. P. Golombek1, J. R. Hall1, O. Pariser1, M. Powell1, R. S. Sletten3, and the MSL Science Team. 1Jet Propulsion Labora- tory, California Inst of Technology ([email protected]), 2Malin Space Science Systems, San Diego, CA ([email protected] ), 3University of Washington, Seattle. Introduction: Localization is a process by which tactical updates are made to a mobile lander’s position on a planetary surface, and is used to aid in traverse and science investigation planning and very high- resolution map compilation. “Contextualization” is hereby defined as placement of localization infor- mation into a local, regional, and global context, by accurately localizing a landed vehicle, then placing the data acquired by that lander into context with orbiter data so that its geologic context can be better charac- terized and understood. Curiosity Landing Site Localization: The Curi- osity landing was the first Mars mission to benefit from the selection of a science-driven descent camera (both MER rovers employed engineering descent im- agers). Initial data downlinked after the landing fo- Fig 1: Portion of mosaic of MARDI EDL images. cused on rover health and Entry-Descent-Landing MARDI imaged the landing site and science target (EDL) performance. Front and rear Hazcam images regions in color. were also downloaded, along with a number of When is localization done? MARDI thumbnail images. The Hazcam images were After each drive for which Navcam stereo da- used primarily to determine the rover’s orientation by ta has been acquired post-drive and terrain meshes triangulation to the horizon. -

Downloaded for Personal Non-Commercial Research Or Study, Without Prior Permission Or Charge
MacArtney, Adrienne (2018) Atmosphere crust coupling and carbon sequestration on early Mars. PhD thesis. http://theses.gla.ac.uk/9006/ Copyright and moral rights for this work are retained by the author A copy can be downloaded for personal non-commercial research or study, without prior permission or charge This work cannot be reproduced or quoted extensively from without first obtaining permission in writing from the author The content must not be changed in any way or sold commercially in any format or medium without the formal permission of the author When referring to this work, full bibliographic details including the author, title, awarding institution and date of the thesis must be given Enlighten:Theses http://theses.gla.ac.uk/ [email protected] ATMOSPHERE - CRUST COUPLING AND CARBON SEQUESTRATION ON EARLY MARS By Adrienne MacArtney B.Sc. (Honours) Geosciences, Open University, 2013. Submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy at the UNIVERSITY OF GLASGOW 2018 © Adrienne MacArtney All rights reserved. The author herby grants to the University of Glasgow permission to reproduce and redistribute publicly paper and electronic copies of this thesis document in whole or in any part in any medium now known or hereafter created. Signature of Author: 16th January 2018 Abstract Evidence exists for great volumes of water on early Mars. Liquid surface water requires a much denser atmosphere than modern Mars possesses, probably predominantly composed of CO2. Such significant volumes of CO2 and water in the presence of basalt should have produced vast concentrations of carbonate minerals, yet little carbonate has been discovered thus far. -
Initial Results from the Miniature Thermal Emission Spectrometer
S PIRIT AT G USEV C RATER S RESEARCH ARTICLE PECIAL Initial Results from the Mini-TES Experiment in S Gusev Crater from the Spirit Rover ECTION P. R. Christensen,1* S. W. Ruff,1 R. L. Fergason,1 A. T. Knudson,1 S. Anwar,1 R. E. Arvidson,2 J. L. Bandfield,1 D. L. Blaney,3 C. Budney,3 W. M. Calvin,4 T. D. Glotch,1 M. P. Golombek,3 N. Gorelick,1 T. G. Graff,1 V. E. Hamilton,5 A. Hayes,6 J. R. Johnson,7 H. Y. McSween Jr.,8 G. L. Mehall,1 L. K. Mehall,1 J. E. Moersch,8 R. V. Morris,9 A. D. Rogers,1 M. D. Smith,10 S. W. Squyres,6 M. J. Wolff,11 M. B. Wyatt1 The Miniature Thermal Emission Spectrometer (Mini-TES) on Spirit has studied Several targets have been observed with the the mineralogy and thermophysical properties at Gusev crater. Undisturbed soil use of 5ϫ spatial oversampling and spatial spectra show evidence for minor carbonates and bound water. Rocks are olivine- deconvolution techniques to improve spec- rich basalts with varying degrees of dust and other coatings. Dark-toned soils tral isolation (8), together with multiple observed on disturbed surfaces may be derived from rocks and have derived RAT brushings to clean larger areas. mineralogy (Ϯ5 to 10%) of 45% pyroxene (20% Ca-rich pyroxene and 25% Undisturbed surficial materials. Un- pigeonite), 40% sodic to intermediate plagioclase, and 15% olivine (forsterite disturbed surfaces in the vicinity of the 45% Ϯ5 to 10). Two spectrally distinct coatings are observed on rocks, a possible station are ϳ5% surface cover of clasts that indicator of the interaction of water, rock, and airfall dust. -

Active Gullies and Mass Wasting on Equatorial Mars
EPSC Abstracts Vol. 12, EPSC2018-457-1, 2018 European Planetary Science Congress 2018 EEuropeaPn PlanetarSy Science CCongress c Author(s) 2018 Active Gullies and Mass Wasting on Equatorial Mars Alfred S. McEwen (1), Melissa F. Thomas (1), Colin M. Dundas (2) (1) LPL, University of Arizona, Tucson, Arizona, USA, (2) USGS, Flagstaff, Arizona, USA Abstract Previously-reported equatorial topographic changes include slumps on the colluvial fans below active Mid- to high-latitude gully activity has been directly RSL sites in Garni Crater [5] and in Juventae Chasma observed at hundreds of locations on Mars [1]. Here [7]. These slumps all occurred near the coldest time we describe equatorial locations (25 latitude) with of year for these locations, Ls 0-120, which is gully-like or other topographic changes in before- opposite to the seasonality of RSL. and-after images from HiRISE. This activity is concentrated in sulfate-rich sedimentary units, which We are in the process of searching HiKER pairs over places constraints on the age and mechanical steep equatorial slopes, as well as acquiring new properties of these deposits. Hydrated sulfates may HiKER images. From the effort to date we have found that equatorial changes are most common in be the largest equatorial reservoir of H2O on Mars, and their friability makes them more attractive for in- sedimentary layers that may be rich is sulfates situ resource utilization (ISRU). according to mapping by orbital spectrometers [8], and have concentrated our search in these regions. 1. Introduction The most impressive changes we have found are on Mid- to high-latitude gully activity can be explained bright layered mounds in Ganges Chasma. -

CURRICULUM VITAE Bradley J
CURRICULUM VITAE Bradley J. Thomson Assistant Professor Department of Earth & Planetary Sciences Phone: 865.974.2699 University of Tennessee Fax: 865.974.2368 1621 Cumberland Ave., Room 602 Email: [email protected] Knoxville, TN 37996-1410 Website: https://lunatic.utk.edu EDUCATION Ph.D. Geological Sciences, Brown University, 2006 Dissertation title: Recognizing impact glass on Mars using surface texture, mechanical properties, and mid-infrared spectroscopic properties Advisor: Peter H. SchultZ M.Sc. Geological Sciences, Brown University, 2001 Thesis title: Utopia Basin, Mars: Origin and evolution of basin internal structure Advisor: James W. Head III B.S. Harvey Mudd College, 1999, Geology major at Pomona College Thesis title: Thickness of basalts in Mare Imbrium Advisor: Eric B. Grosfils PROFESSIONAL EXPERIENCE Assistant Professor, Department of Earth and Planetary Sciences (EPS), University of Tennessee, Knoxville TN, 2020–present Research Associate Professor, Department of Earth and Planetary Sciences (EPS), University of Tennessee, Knoxville TN, 2016–2020 Senior Research Scientist, Boston University Center for Remote Sensing, 2011–2016 Co-Investigator, Mini-RF radar on the Lunar Reconnaissance Orbiter, 2009–present Co-Investigator, Mini-SAR radar on Chandrayaan-1, 2008–2009 Senior Staff Scientist, JHU Applied Physics Lab, 2008–2011 NASA Postdoctoral Program Fellow, Jet Propulsion Lab, 2006–2008 Science Theme Lead for mass wasting processes HiRISE camera on Mars Reconnaissance Orbiter, 2007–2010 Postdoctoral Fellow, Lunar and Planetary -

Broschüre Zu MIMOS II
MMOS Mössbauerspektrometer auf dem Mars Mössbauer spectrometer on Mars Einleitung Mars ist von allen Planeten im Sonnen Um zwei Landestellen genau zu unter system der Erde am ähnlichsten. Unser suchen, startete die NASA 2003 die „Mars Nachbarplanet verfügt über eine dünne ExplorationRoverMission“. Die beiden Atmosphäre, die Temperaturen auf Rover „Spirit“ und „Opportunity“ sind nach der Marsoberfläche erreichen bis zu „Mars Pathfinder“ bereits robotische 20 °C und ein Tag auf dem Mars („Sol“) MarsErkunder der zweiten Generation. Als dauert nur 39 Minuten länger vorrangige Ziele der Mission wurde definiert, als ein Tag auf der Erde. an zwei Stellen auf der Marsoberfläche nach Hinweisen auf mögliche Wasser Der Mars ist daher ein begehrtes aktivität in der Vergangenheit zu suchen und Forschungsobjekt, um mehr über mögliche aus den Ergebnissen Rückschlüsse auf die Entwicklungsszenarien eines erdähnlichen Entwicklung des Marsklimas und möglicher Planeten zu lernen. weise einst vorhandene lebensfreundliche Bedingungen auf dem Mars zu ziehen. Eine Frage ist von besonderem Interesse: Warum konnten auf der Erde lebensfreund Als Teil ihrer wissenschaftlichen Nutzlast liche Bedingungen entstehen, aber nicht auf tragen beide Rover das miniaturisierte dem Mars? Da Wasser die Grundlage aller Mössbauerspektrometer MIMOS II, dessen bekannten Lebensformen bildet, folgen die Aufgabe der Nachweis von Eisenmineralen Forscher mit ihren Untersuchungen den ist. Einige dieser Minerale können mit Spuren von Wasseraktivität auf dem Mars. dem Vorhandensein von Wasser bei ihrer Seit mehr als vier Jahrzehnten sind dazu Entstehung in Verbindung gebracht werden. Bilder und spektroskopische Daten sowohl Die mineralogische Charakterisierung aus dem Marsorbit als auch von der der Landestellen gibt zusätzlich Aufschluss Oberfläche aufgenommen worden. -

Art on Mars: a Foundation for Exoart
THESIS SUBMITTED FOR THE DEGREE OF DOCTOR OF PHILOSOPHY UNIVERSITY OF CANBERRA AUSTRALIA by TREVOR JOHN RODWELL Bachelor of Design (Hons), University of South Australia Graduate Diploma (Business Enterprise), The University of Adelaide ART ON MARS: A FOUNDATION FOR EXOART May 2011 ABSTRACT ART ON MARS: A FOUNDATION FOR EXOART It could be claimed that human space exploration started when the former Soviet Union (USSR) launched cosmonaut Yuri Gagarin into Earth orbit on 12 April 1961. Since that time there have been numerous human space missions taking American astronauts to the Moon and international crews to orbiting space stations. Several space agencies are now working towards the next major space objective which is to send astronauts to Mars. This will undoubtedly be the most complex and far-reaching human space mission ever undertaken. Because of its large scale and potentially high cost it is inevitable that such a mission will be an international collaborative venture with a profile that will be world- wide. Although science, technology and engineering have made considerable contributions to human space missions and will be very much involved with a human Mars mission, there has been scant regard for artistic and cultural involvement in these missions. Space agencies have, however, realised the influence of public perception on space funding outcomes and for some time have strived to engage the public in these space missions. This has provided an opportunity for an art and cultural involvement, but there is a problem for art engaging with space missions as currently there is no artform specific to understanding and tackling the issues of art beyond our planet.