TM5 Hardware Installation Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

FAQ About Recycling Cartons
FREQUENTLY ASKED QUESTIONS ABOUT CARTONS WHAT IS A CARTON? » Cartons are a type of packaging for food and beverage products you can purchase at the store. They are easy to recognize and are available in two types—shelf-stable and refrigerated. Shelf-stable cartons (types of products) Refrigerated (types of products) » Juice » Milk » Milk » Juice » Soy Milk » Cream » Soup and broth » Egg substitutes » Wine You will find these You will find these products in the chilled products on the shelves sections of grocery stores. in grocery stores. WHAT ARE CARTONS MADE FROM? » Cartons are mainly made from paper in the form of paperboard, as well as thin layers of polyethylene (plastic) and/or aluminum. Shelf-stable cartons contain on average 74% paper, 22% polyethylene and 4% aluminum. Refrigerated cartons contain about 80% paper and 20% polyethylene. ARE CARTONS RECYCLABLE? » Yes! Cartons are recyclable. In fact, the paper fiber contained in cartons is extremely valuable and useful to make new products. WHERE CAN I RECYCLE CARTONS? » To learn if your community accepts cartons for recycling, please visit RecycleCartons.com or check with your local recycling program. HOW DO I RECYCLE CARTONS? » Simply place the cartons in your recycle bin. If your recycling program collects materials as “single- stream,” you may place your cartons in your bin with all the other recyclables. If your recycling program collects materials as “dual-stream” (paper items together and plastic, metal and glass together), please place cartons with your plastic, metal and glass containers. WAIT, YOU JUST SAID CARTONS ARE MADE MAINLY FROM PAPER. Don’t I WANT TO PUT THEM WITH OTHER PAPER RECYCLABLES? » Good question. -

French Reverse Or Airplane Straight? Carton Styles Explained
French Reverse or Airplane Straight? Carton Styles Explained. Industry Insights • Global folding carton packaging market valued at $117B in 2018. View Source • Expected CAGR of 4.4% over 2019–2024 forecast period. View Source • Brand owners and marketers are leaning on packaging to allure consumers more than ever before. • Folding carton products still represent the most important material used for the packaging of goods with roughly 25% of market share. • US folding carton shipments projected to be $9.65B in 2021. View Source French Reverse Tuck (also known as Reverse Tuck End) • Style differs from the Standard Reverse Tuck due to its bottom closure attaching in the rear and folding/tucking towards the front of the carton while its top closure is joined in front and folds/tucks towards the rear. The diagram shows a French Reverse Tuck carton with a slit (pie) lock bottom (more secure) and a friction lock top closure (easy to open and re-close). This style has a polished, finished look which enhances graphic design capabilities. Additional available closure styles include a friction lock for top and bottom and the slit jock for top and bottom. Able to set up fast and easy without tape or glue. • Usages: Custom food, medical, pharmaceutical packaging, retail, software boxes, and toy boxes. • Pros: Cost effective, easy assembly, compact storing, works for light packaging. • Cons: Not good for heavy products, raw edges on front of box. Airplane Style Straight Tuck (also known as Straight Tuck End) • Style features closure panels on both the bottom and top that hinge from the rear and tuck in the front. -

PACKAGING Folding Carton & Corrugated
WEDNESDAY, NOV. 4, 2020 GUIDE TO DAY EIGHT: PACKAGING Folding Carton & Corrugated INSIDE: CONNECTED PACKAGING DELIVERING GENUINE CONSUMER ENGAGEMENT IS YOUR BRAND READY? THE STATE OF THE FOLDING CARTON & CORRUGATED MARKETS FIVE PACKAGING AND DESIGN TRENDS FOR 2020 TODAY’S SPONSOR: POWERED BY: WELCOME Welcome to this special publication for attendees of the 2020 PRINTING United Digital Experience. In June, PRINTING United announced the decision to transition from an in-person event in Atlanta, Ga. to a comprehensive digital platform. The PRINTING United Digital Ex- perience, taking place Oct. 26 – Nov. 12, o ers attendees three weeks of live, guided programming, educational sessions, and panel discussions with the experts; along with access to a complete online exhibitor showcase featuring information about the newest industry technology, case studies, whitepapers, the chance to speak with exhibitor repre- sentatives, and more. Today is Day Eight of this 14-day event. Focused on the package printing market — spe- cifi cally the folding carton and corrugated segments — attendees have a packed sched- ule of content and product demos (see the detailed agenda on page 4). According to the Digital Printing for Folding Carton Converting study by PRINTING United Alliance and Keypoint Intelligence, the folding carton segment represents about $18 billion in annual print value in the U.S. and Canada. The Fibre Box Association reports that the U.S. corrugated packaging market represents about $35.2 billion in annual print value. For both of these markets, however, it is estimated that 99% of the products are printed via analog technologies. There is a signifi cant amount of opportunity for digital printing going forward. -
EGG CARTON Filed Dec
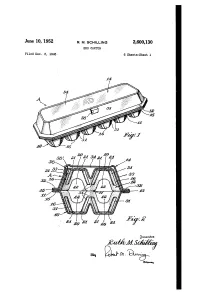
June 10, 1952 R. M. SCHILLING 2,600,130 EGG CARTON Filed Dec. 3, 1945. 6 Sheets-Sheet 1 June 10, 1952 R. M. SCHILLING 2,600,130 EGG CARTON Filed Dec. 3, 1945 6 Sheets-Sheet 2 June 10, 1952 R. M. scHILLING 2,600,130 EGG CARTON Filed Dec. 3, 1945 6 Sheets-Sheet 3 aese essessease VAWA) All ly/AWA WAITWA/WAIVIM/WATWIAI (AAA-AA-AA-AA C - seese Neerae YawawasaNANAAAAAALI sSSSSSS27 As Area - June 10, 1952 R. M. SCHILLING 2,600,130 EGG CARTON Filed Dec. 3, 1945 6 Sheets-Sheet 4 a 4642 50464,2346 042 42 4620 37 June 10, 1952 R. M. SCHILLING 2,600,130 EGG CARTON Filed Dec. 3, 1945 6 Sheets-Sheet 5 20 63 67 63 69 67 62 (seeAll 4 INA Y 69E9E9E9E9E9ESISDEES's Se21 Eas EastEs 62 22769393 21 N *2\Stats: NS4 (S.395 S. 60 62 62. 69.64 72 3: 6 22 7a 64.7065777a TT66 Zze 67, Sebsite&ressbváxissilsEA 2. NS 55 626Z 241.3 Sa:É, ASL June 10, 1952 R. M. SCHILLING 2,600,130 EGG CARTON Filed Dec. 3, 1945 6 Sheets-Sheet 6 s. 24.) be Patented June 10, 1952 2,600,130 UNITED STATES PATENT OFFICE 2,600,130 EGG CARTON Ruth M. Schilling, St. Paul, Minn., assignor, by mesne assignments, to Shellmar Products Cor poration, Chicago, Ill., a corporation of Dela Ware Application December 3, 1945, Serial No. 632,331 8 Claims. (C. 229-2.5) 2 My invention relates to an improvement in by my carton from movement in any direction. -

Xpedx, LLC, a Veritiv Company Camp Hill, PA
Bid Tabulation #2015-35 Office Papers and Envelopes Impact Office WB Mason B.W. Wilson Paper Company, Inc. Xpedx, LLC, A Veritiv Company Beltsville, MD York, PA Richmond, VA Camp Hill, PA Description & Specified Specification Cartons Bid Product Bid Package Price Per Extended Bid Product Bid Package Price Per Extended Bid Product Bid Package Price Per Extended Bid Product Bid Package Price Per Extended As Spec'd? (√ As Spec'd? (√ As Spec'd? (√ As Spec'd? (√ Product Number or Note Alt. Carton/Box Total/Year Number or Note Alt. Carton/Box Total/Year Number or Note Alt. Carton/Box Total/Year Number or Note Alt. Carton/Box Total/Year Pkg.) Pkg.) Pkg.) Pkg.) Multipurpose White Paper, 8 20 pound, 92 brightness, 8.5" x 11" , 1/2 X 11", Xpedex - Vector - 10M, White, Multi Purpose (10 1 MFG # 095347 or Equal reams of 500 sheets or 5,000 sheets GP Spectrum per carton) 8220 IMP851192 $ 26.65 $ 219,063.00 WBM21200 √ $ 28.19 $ 231,721.80 999705 $ 26.45 $ 217,419.00 2368365 √ $ 25.22 $ 207,308.40 Multipurpose White Paper, 20 pound, 11" x 17", 20M White *wrote 11 X 17" (2,500 sheets per carton) 6.89 2 GP Spectrum 120 FCPS010453 $ 34.45 $ 4,134.00 WBM28110 √ $ 29.30 $ 3,516.00 999812L2 $ 29.25 $ 3,510.00 2251793 Vector $ 28.97 $ 3,476.40 Multipurpose WHITE Paper, 20 pound, 8.5" x 14", 12M, White 8 1/2 X 14" (10 reams of 500/5,000 sheets per 3 GP Spectrum carton) 15 MOH14 $ 44.29 $ 664.35 WBM24200 √ $ 38.97 $ 584.55 999706 $ 37.25 $ 558.75 2251794 Vector $ 36.85 $ 552.75 Multipurpose WHITE Paper, 24 pound, 8.5" x 11, 12.72M, White 8 1/2 X 11" (10 reams -

Wolf Classic Specs
PRODUCT SPECIFICATIONS Effective January 11, 2021 CABINETRY WOLF CLASSIC With a combination of style and affordability,Wolf Classic has become one of America's most popular cabinetry lines. Designed for independent dealers by independent dealers, cabinets are available in today's most popular door style and finish combinations in stock and at extremely attractive price points. With a broad selection of SKUs, mouldings, modifications, and Complement Paints, Wolf Classic will make any design as beautiful as it is affordable. Wolf Classic is a trusted choice for cabinetry. It’s backed by a five-year warranty, which is better than any other cabinetry line at this price, so you can buy with confidence. EXCEPTIONAL STYLE, EXCEPTIONAL VALUE Designed for independent dealers by independent dealers, Wolf Classic proudly offers today’s most popular door style/finish combinations in stock and at extremely attractive price points.This includes the upscale look of paints at no additional charge. With a broad selection of SKUs, accessories and mouldings, Wolf Classic will make any design as beautiful as it is affordable. QUALITY IS IN THE DETAILS Wolf Classic offers distinct series to make finding the right cabinetry for every project easy.Thanks to carefully curated styles, finishes, features and more, every need is met with a quality choice. Plus, all Wolf Classic cabinets are handcrafted, combining generations of woodworking expertise with today’s latest manufacturing technologies. Solid hardwood components and a state-of-the-art finishing systems produce a consistently beautiful and long-lasting appearance. BUY WITH CONFIDENCE You can be confident when choosing Wolf Classic cabinets. -

TICCIT Member Announcement
2011 PROGRAM GUIDE TREES INTO CARTONS, CARTONS INTO TREES TICCIT Educational Goals Jennie Markens of PPC rom the presentation, helps a fifth-grade students should walk student at Brightwood Faway with an under - Elementary School to standing of the: plant a sapling in a n Benefits of trees to the used milk carton. earth’s lifecycle n Benefits of paper- based packaging over plastic and other less TICCIT Overview sustainable forms of packaging ICCIT (pronounced “ticket,” which paper is made, and why trees are important n How paper is made stands for “Trees into Cartons, Cartons to the earth’s lifecycle. n How a milk carton is into Trees”) is an outreach and educa - Each company also donates either tree made from paper T n How a milk carton will tional program for fourth through sixth seeds or native saplings to each child to plant biodegrade over time graders that is held at the end of each April in a milk carton they have saved from lunch in honor of Earth Day. (or brought from home). The new “carton- The 45-minute program is designed to and-tree units” are then planted in the highlight the natural renewability and sus - ground. The cartons provide protection and tainability of paperboard packaging. As part a natural water funnel for the new trees. of TICCIT, PPC members partner with local As the trees grow, the cartons biodegrade, elementary schools to make a presentation to completing the “trees into cartons, cartons students about the benefits of recycling, how into trees” cycle. 2010 TICCIT Participants n 2010, eleven PPC members participated in TICCIT. -

Paper: Copy, Card, Computer, NCR, Misc, Envelopes
10/30/2018 Paper: Copy, Card, Computer, NCR, Misc, Envelopes Page: 1 Bid Opening: 10/17/2018 Period Range: 11/01/2018 - 01/31/2019 Supplies Catalog (By Category) Awarded Vendors Sub Classification: Group I Description/Brand/Alternative/Variance Unit Price Vendor Awarded 130000 Offset 70# Long Grain - WHITE CARTON $54.2400 9013 10 / 2018 11" X 17" W.B. Mason 70# Windsor Offset 2000/Ctn Husky or equivalent WILLIAMS BURG/HMM05337 130005 Offset 60# Long Grain - WHITE CARTON $52.9000 9013 10 / 2018 11" X 17" W.B. Mason 60# Husky or equivalent 2500/Ctn HUSKY/LIND8947 130010 Xerographic Paper - WHITE CARTON $42.3200 9013 10 / 2018 8 1/2" X 11" W.B. Mason 24#, 96 Brightness 5000/Ctn Imageprint or equivalent MASON SUPERSTAR/STR91200 130015 Xerographic Paper - WHITE CARTON $39.2600 9013 10 / 2018 8 1/2" X 14" W.B. Mason 20#, White Savin or equivalent 5000/Ctn MASON FLAGSHIP/WBM24200 130020 Xerographic Paper - WHITE CARTON $28.4700 9013 10 / 2018 8 1/2" X 11" W.B. Mason 20#, White Savin or equivalent 5000/Ctn MASON FLAGSHIP/WBM21200 130021 Mohawk Color Copy 98 Bright White CARTON $64.1400 9013 10 / 2018 28 W 8.5 x 14 17.8M W.B. Mason 3000/Ctn MOHAWK/MOW12205 10/30/2018 Paper: Copy, Card, Computer, NCR, Misc, Envelopes Page: 2 Bid Opening: 10/17/2018 Period Range: 11/01/2018 - 01/31/2019 Supplies Catalog (By Category) Awarded Vendors Sub Classification: Group I Description/Brand/Alternative/Variance Unit Price Vendor Awarded 130025 Xerographic Paper - WHITE CARTON $31.3800 9013 10 / 2018 8 1/2" X 11" W.B. -

WHITE PAPER Gable-Top Cartons Considerations for This Container Choice Are High End Graphics and a Quick Turnaround Realistic for Gable-Top Cartons?
WHITE PAPER Gable-Top Cartons Considerations For This Container Choice Are High End Graphics and a Quick Turnaround Realistic for Gable-Top Cartons? A Little History. Like many multifaceted printers serving food, pharma and consumer packaged good (CPG) categories, our customers’ requests can vary widely. We try to keep our facility and equipment state-of-the-art so we can accommodate a wide range of specifications. In the last five years, we started noticing a trend. Our customers wanting gable top cartons always seem to have the same request – how can I get high end, creative graphics with quick turnaround? Customers using the larger sizes of gable top cartons (the gallon size for example) and customers using heavier, coated paperboard (more commonly called milk stock) especially found their printing choices to be limited to flexographic printing, less sturdy paperboard and low quality graphics. We heard major challenges such as print registration being so poor that you couldn’t even read an ingredients list. The reasons for choosing gable-top cartons were clear to us - customers want the billboard space to tell their story. Cartons give you room for branding and selling. And gable-top cartons can be significantly more affordable, costing up to 30% less than their plastic tub counterparts. If you use plastic to contain your product, you are limited to options and subjected heavily to the petroleum market. After hearing some of these challenges, Carton Service decided to take a look. We evaluated the market and our capabilities and found that there might be an opportunity to help an underserved market. -

Making a Birdfeeder from Creatively Repurposed Materials
Making a Birdfeeder from Creatively Repurposed Materials Helpful Hints: Be sure the container is washed and completely clean. Save the lid when washing a soda bottle. Remove the labels. If there is a strong smell after washing, fill with water and add several tablespoons of baking soda. Let sit for an hour, Wash again. After washing, let the container dry completely. Have a parent help you if you are cutting with a sharp tool. Try creating a feeder by using the bottle or carton upside down! Use twigs or sticks from your yard as perches. Do not use glitter, toxic paint, or items that may harm birds. Be sure there are no sharp edges on the feeder. When you take your feeder home, place it where birds can easily reach it. Place your birdfeeders in places that aren’t too windy, have good cover nearby, and minimize other hazards. Making a Birdfeeder from Creatively Repurposed Materials A couple simple recycled bird feeder options are a 20-ounce plastic bottle or a quart or half-gallon cardboard drink carton. For either one, simply wash it out well, cut two to three sets of holes opposite each other at varying levels and insert old wooden spoons all the way through. Attach twine at the top to hang it by, and fill with your favorite bird seed. ****************************************************************************** Punch holes on either side of a plastic pop bottle, stick a twig all the way through with its ends sticking out for perches and poking more holes nearby for the birds to pull the seeds out. -
Environmental Report 2017
Environmental Report 2017 Table of Contents Renewable Sourcing, Increased Renewable Sourcing, Increased Efficiency and Recycling 05 Renewability 07 Efficiency and Recycling Why Is Renewability Important? 08 The Importance of Forests 10 For Elopak, the environmental strategy fundamentally has to do with management of the earth’s Elopak’s New and Improved Renewable PE Offering 12 resources. This is operationalized through the sourcing of renewable raw materials, through efficient Naturally Pure-Pak® 14 production and distribution processes, and by recycling to take care of resources after use. Elopak Joins Norwegian Research Team 17 Environmental Highlights 2017 18 Renewability in sourcing means utilizing raw materials from sources that renew themselves over a Carbon Neutral – two years in 21 reasonable time period. Paperboard, the main raw material for our cartons, is a good example. Wood Elopak’s Pathway to Carbon Neutrality 22 sources are renewed over a few decades. Elopak is reinforcing the use of environmentally responsible Uganda Improved Cookstoves Project 23 wood fibers, and is expanding the sourcing of renewable polyethylene. Another prioritized area is the Rimba Raya Biodiversity Reserve Project 24 sourcing of renewable electricity. By using renewable resources, we are not contributing to the Recycling 25 depletion of scarce resources, and we reduce the carbon footprint of our operations and our products. The Journey of a Used Beverage Carton 28 You can read more about our sourcing strategy in this report. Methodology 30 We continue our efforts to improve the efficiency of our production processes, reducing waste and thereby the amount of raw material used per carton produced, reducing energy consumption, Published by Elopak AS Group HQ Published: March 2018 Illustrations: optimizing logistical solutions and many other measures. -
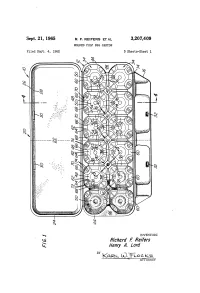
Kael- (Otto C <S
Sept. 21, 1965 R. F. REIFERs ET AL 3,207,409 MODED PULP EGG CARTON Filed Sept. 4, 1962 5 Sheets-Sheet 37/ INVENTORS ?9/3/ Aichard AE A’effers Henry A. Lord BY KAel- (Otto c <S ATTORNEY Sept. 21, 1965 R. F. REIFERs ETAL 3,207409 MOLDED PULP EGG CARTON Filed Sept. 4, 1962 5. Sheets-Sheet 2 ShhAAhhAAJJ HLLLLLhAAALAAAAhJA L Hh INVENTORS Aichard AE A’e/fers Henry A. Lord BY - KA ReSr. - - GUD,2 Foc- ATTONEy SS Sept. 21, 1965 R. F. REIFERS ETAL 3,207409 MOLDED PULP EGG CARTON Filed Sept. 4, 1962 5 Sheets-Sheet 3 A/6.6 INVENTORS Alchard AE feifers Henry A. Lord BY KARL GUD. FL-Ocksts ATTORNEY Sept. 21, 1965 R. F. REIFERs ETAL 3,207409 MODED PULP EGG CARTON Filed Sept. 4, 1962 5 Sheets-Sheet 4 A/G 10 A/G, ?/ A/6/2 Rigid-, - Flexible Area - Rigid 62 86" 68 86' 62' A/6 /3 INVENTORS AFPichard A feifers Henry A. Lord P° KARA (). Flock<s ---6 ATTORNEY Sept. 21, 1965 R. F. REFERs ETAL 3,207,409 MOLDED PULP EGG CARTON Filed Sept. 4, 1962 5 Sheets-Sheet 5 A/G f4 252 226 W.W , INVENTORS Aichard A5 /eifers Henry A. Lord BY KAR- Uu). Locks ????y 3,207,409 United States Patent Office Patented Sept. 21, 1965 2 vide a novel substantially universal molded pulp egg 3,207,409 carton in which egg movement and rattle are substan MOLEDED PULP EGG CARTON tially reduced, to accommodate for varying dimensions Richard F. Reifers, New Canaan, Conn., and Henry A.