Influencing Parameters on Tire–Pavement Interaction Noise: Review, Experiments and Design Considerations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Road Texture and Tire Noise
Copyright SFA - InterNoise 2000 1 inter.noise 2000 The 29th International Congress and Exhibition on Noise Control Engineering 27-30 August 2000, Nice, FRANCE I-INCE Classification: 1.3 ROAD TEXTURE AND TIRE NOISE J.-F. Hamet, P. Klein INRETS, 25 av. F. Mitterrand, F69675, Bron, France Tel.: +33(0)472142402 / Fax: +33(0)472376837 / Email: [email protected] Keywords: TIRE, ROAD, NOISE, TEXTURE ABSTRACT The research project presented here addresses the influence of road texture profile on tire noise. It is deemed more appropriate, when seeking for correlation between road profile and tire noise spectra, to ’envelope’ the road profile before evaluating its spectrum. Two approaches are taken to tackle the problem. A static approach based on evaluating the contact between two plane surfaces. A dynamic approach based on a rolling tire model. Since the latter enables the evaluation of tire noise from any given road texture profile, it is also used to get a better grasp of the phenomena. Only the fundamentals of the processes are presented: experiments will be performed in the coming years. The static approach is worked in the PREDIT project ”Relation between road texture and the tire noise” [1]. The partners are: INRETS, LCPC, ENPC, MICROdB, Gerland Routes, Colas S.A. The dynamic approach is developed in the frame of the European project SI.R.U.US. The partners are Autostrade (it), CRR (be), Pavimental (it), INRETS (fr), SACER (fr), Argex (be), LNEC (pt). 1 - INTRODUCTION Although some 20 years elapsed since the basics of the road texture influence on tire noise were given [2] the principles for designing low noise surfaces remain mostly qualitative [3]. -

Prestone Ebook Winter Driving 3
A Prestone ebook: WINTER DRIVING Of all the seasons, winter creates the most challenging driving conditions, and can be extremely tough on your car. Treacherous weather coupled with dark evenings can make driving hazardous, so it’s vital you ready yourself and your car before the season takes hold. From heavy rain to ice and snow, winter will throw all sorts of extreme weather your way — so it’s best to be prepared. By checking the condition of your car and changing your driving style to adapt to the hazardous conditions, you can keep driving no matter how extreme the weather becomes. To help you stay safe behind the wheel this season, here’s an in-depth guide on the dos and don’ts of winter driving. From checking your vehicle’s coolant/antifreeze to driving in thick fog, heavy rain and high winds — this guide is packed with tips and advice on driving in even the most extreme winter weather. PREPARING YOUR VEHICLE FOR WINTER DRIVING Keeping your car in a good, well maintained condition is important throughout the year, but especially so in winter. At a time when extreme weather can strike at any moment, your car needs to be prepared and ready for the worst. The following checks will help to make sure your car is ready for even the toughest winter conditions. COOLANT / ANTIFREEZE Whatever the weather, your car needs coolant/antifreeze all year round to make sure the engine doesn’t overheat or freeze up. By adding a quality coolant/antifreeze to your engine, it’ll be protected in all extremes — from -37°C to 129°C and you’ll also be protected against corrosion. -

The Parliament of the Commonwealth of Australia Tyre Safety Report Op the House of Representatives Standing Committee on Road Sa
THE PARLIAMENT OF THE COMMONWEALTH OF AUSTRALIA TYRE SAFETY REPORT OP THE HOUSE OF REPRESENTATIVES STANDING COMMITTEE ON ROAD SAFETY JUNE 1980 AUSTRALIAN GOVERNMENT PUBLISHING SERVICE CANBERRA 1980 © Commonwealth of Australia 1980 ISBN 0 642 04871 1 Printed by C. I THOMPSON, Commonwealth Govenimeat Printer, Canberra MEMBERSHIP OF THE COMMITTEE IN THE THIRTY-FIRST PARLIAMENT Chairman The Hon. R.C. Katter, M.P, Deputy Chai rman The Hon. C.K. Jones, M.P. Members Mr J.M. Bradfield, M.P. Mr B.J. Goodluck, M.P. Mr B.C. Humphreys, M.P. Mr P.F. Johnson, M.P. Mr P.F. Morris, M.P. Mr J.R. Porter, M.P. Clerk to the Committee Mr W. Mutton* Advisers to the Committee Mr L. Austin Mr M. Rice Dr P. Sweatman Mr Mutton replaced Mr F.R. Hinkley as Clerk to the Committee on 7 January 1980. (iii) CONTENTS Chapter Page Major Conclusions and Recommendations ix Abbreviations xvi i Introduction ixx 1 TYRES 1 The Tyre Market 1 -Manufacturers 1 Passenger Car Tyres 1 Motorcycle Tyres 2 - Truck and Bus Tyres 2 ReconditionedTyi.es 2 Types of Tyres 3 -Tyre Construction 3 -Tread Patterns 5 Reconditioned Tyres 5 The Manufacturing Process 7 2 TYRE STANDARDS 9 Design Rules for New Passenger Car Tyres 9 Existing Design Rules 9 High Speed Performance Test 10 Tests under Conditions of Abuse 11 Side Forces 11 Tyre Sizes and Dimensions 12 -Non-uniformity 14 Date of Manufacture 14 Safety Rims for New Passenger Cars 15 Temporary Spare Tyres 16 Replacement Passenger Car Tyres 17 Draft Regulations 19 Retreaded Passenger Car Tyres 20 Tyre Industry and Vehicle Industry Standards 20 -

RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE and OPEN- LOOP HANDLING METRICS Robert Powell Clemson University, [email protected]
Clemson University TigerPrints All Theses Theses 1-1-2009 RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE AND OPEN- LOOP HANDLING METRICS Robert Powell Clemson University, [email protected] Follow this and additional works at: http://tigerprints.clemson.edu/all_theses Part of the Engineering Mechanics Commons Please take our one minute survey! Recommended Citation Powell, Robert, "RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE AND OPEN-LOOP HANDLING METRICS" (2009). All Theses. Paper 743. This Thesis is brought to you for free and open access by the Theses at TigerPrints. It has been accepted for inclusion in All Theses by an authorized administrator of TigerPrints. For more information, please contact [email protected]. RELATIONSHIPS BETWEEN LANE CHANGE PERFORMANCE AND OPEN-LOOP HANDLING METRICS A Thesis Presented to the Graduate School of Clemson University In Partial Fulfillment of the Requirements for the Degree Master of Science Mechanical Engineering by Robert A. Powell December 2009 Accepted by: Dr. E. Harry Law, Committee Co-Chair Dr. Beshahwired Ayalew, Committee Co-Chair Dr. John Ziegert Abstract This work deals with the question of relating open-loop handling metrics to driver- in-the-loop performance (closed-loop). The goal is to allow manufacturers to reduce cost and time associated with vehicle handling development. A vehicle model was built in the CarSim environment using kinematics and compliance, geometrical, and flat track tire data. This model was then compared and validated to testing done at Michelin’s Laurens Proving Grounds using open-loop handling metrics. The open-loop tests conducted for model vali- dation were an understeer test and swept sine or random steer test. -

Exxon™ Butyl Rubber Innertube Technology Manual
Exxon™ butyl rubber Exxon™ butyl rubber innertube technology manual Country name(s) 2 - Exxon™ butyl rubber innertube technology manual Exxon™ butyl rubber innertube technology manual - 3 Abstract Many bias and radial tires have innertubes. Radial truck tube-type tires are particularly common, and in many instances, such as in severe service, off-road applications, are preferred over tubeless radial tire constructions. The technology requirements for tubes for such tires is, in many respects, equally demanding when compared to that for the tire and wheel in the assembly. This manual has been prepared to describe how butyl rubber is important in meeting the demanding performance requirements of tire innertubes. Representative innertube compound formulations and compound properties are discussed along with typical processing guidelines of the compound in the manufacture of innertubes. Chlorobutyl rubber based compound formulations are also used in innertubes. Such innertubes show good heat resistance, durability, allow greater flexibility in compounding, and process equally well as regular butyl rubber tube compounds. An extensive discussion of bicycle tire innertubes has been included. Service conditions can range from simple commuting and recreation to high speed competitive sporting applications. Like automobile and truck tire innertubes, tubes for bicycle tires can thus have demanding performance requirements. Guidelines on troubleshooting provide a checklist for the factory process engineer to enhance manufacturing efficiency, high -
Automotive Engineering II Lateral Vehicle Dynamics
INSTITUT FÜR KRAFTFAHRWESEN AACHEN Univ.-Prof. Dr.-Ing. Henning Wallentowitz Henning Wallentowitz Automotive Engineering II Lateral Vehicle Dynamics Steering Axle Design Editor Prof. Dr.-Ing. Henning Wallentowitz InstitutFürKraftfahrwesen Aachen (ika) RWTH Aachen Steinbachstraße7,D-52074 Aachen - Germany Telephone (0241) 80-25 600 Fax (0241) 80 22-147 e-mail [email protected] internet htto://www.ika.rwth-aachen.de Editorial Staff Dipl.-Ing. Florian Fuhr Dipl.-Ing. Ingo Albers Telephone (0241) 80-25 646, 80-25 612 4th Edition, Aachen, February 2004 Printed by VervielfältigungsstellederHochschule Reproduction, photocopying and electronic processing or translation is prohibited c ika 5zb0499.cdr-pdf Contents 1 Contents 2 Lateral Dynamics (Driving Stability) .................................................................................4 2.1 Demands on Vehicle Behavior ...................................................................................4 2.2 Tires ...........................................................................................................................7 2.2.1 Demands on Tires ..................................................................................................7 2.2.2 Tire Design .............................................................................................................8 2.2.2.1 Bias Ply Tires.................................................................................................11 2.2.2.2 Radial Tires ...................................................................................................12 -
Information on Tire Radial Force Variation (RFV)
Information on Tire Radial Force Variation (RFV) 2019 and Prior GM Passenger Cars and Light Duty Trucks This Bulletin also applies to any of the above models that may be Export from North America vehicles. This Bulletin has been revised to add the 2018 and 2019 Model Year. Please discard Corporate Bulletin Number 00-03-10-006M. Important Before measuring tires on GM approved tire force variation measurement equipment, the vehicle MUST be driven a minimum of 24 km (15 mi) to ensure removal of any flat-spotting. Refer to the latest version of Corporate Bulletin Number 03-03-10-007: Tire/Wheel Characteristics of GM Original Equipment Tires. GM approved tire force variation measurement equipment MUST be calibrated prior to measuring tire/wheel assemblies for each vehicle. Note If the equipment being used is capable of performing a centering check, the centering check must be completed before taking measurements of balance or RFV. The purpose of this bulletin is to provide guidance to GM dealers when using GM approved tire force variation measurement equipment. This type of equipment can be a valuable tool in diagnosing vehicle ride concerns. The most common ride concern involving tire radial force variation is highway speed (105-115 km/h (65-70 mph) shake on smooth roads. Tire related smooth road highway speed shake can be caused by three conditions: imbalance, out of round and tire force variation. These three conditions are not necessarily related. All three conditions must be addressed. Imbalance is normally addressed first, because it is the simplest of the three to correct. -

TECHNICAL SERVICE BULLETINS Ultraseal Tire Life Extender/Sealer
Ultraseal Tire Life Extender/sealer ® TECHNICAL SERVICE BULLETINS EXTENDING TIRE LIFE TIRE SIZES, APPLICATIONS & SITUATIONS TO AVOID TUBE-TYPE TIRES MOUNTING SOLUTIONS OUT-OF-ROUND CONDITION AVOIDING VALVE CORE PROBLEMS OUT-OF-BALANCE CONDITION VIBRATIONS RUST AND CORROSION AVOIDING POTENTIAL TREAD SEPARATIONS & ZIPPER RUPTURES QUALITY CONTROL PUNCTURE DOES NOT SEAL ® Ultraseal Tire Life Extender/sealer TECHNICAL SERVICE BULLETIN EXTEND TIRE LIFE Many years ago, Ultraseal R&D developed an anti-aging additive and incorporated it into its manufacturing process to reduce the detrimental effects related to heat buildup in tire casings. In the past, the U.S. Military had experienced excessive dry-rotting in many tires, primarily in desert environments. After installing Ultraseal, careful moni- toring showed that treated tires had significant reduction of incidencdes of dry rot as compared to untreated controls. Ultraseal’s proprietary ability to retard dry rot and maintain the casing's resilience is a remarkable achievement considering dry rot is typically caused by outside contaminants and UV radiation. Ultraseal Tire Life Extender/sealer cannot restore an old tire that has lost elasticity, however, it will inhibit and retard subsequent casing degradation. Retreading is a major cost savings for fleets. The more times a casing can be retreaded, the lower the cost per mile. This represents a substantial savings. Plus, retreading re- duces the environment impact by reducing the number of casings being recycled. Ultraseal Tire Life Extender/sealer will enhance the tire casing in many ways. In new tires, as well as retreads, Ultraseal virtually eliminates porosity and air migration, lowers heat and significantly reduces the occurance of tread, belt and zipper separations. -

Managing End-Of-Life Tires
Managing End-of-Life Tires Full report World Business Council for Sustainable Development Contents WBCSD Tire Industry Project: An introduction 1 The life of a tire: Facts and trends 2 What are tires made of? What is the environmental impact of a tire during its life cycle? What is an end-of-life tire? End-of-life tire generation and recovery worldwide How does the end-of-life tire recovery rate compare with other goods? End-of-life tire uses: Numerous possibilities, existing and under development 6 Why use end-of-life tires and for what purposes? Energy recovery Material recovery Other innovative and emerging uses for end-of-life tires Management systems for collecting and recovering end-of-life tires 11 Tire industry responsibility Government/community responsibility Free market approach Landfill and waste piles End-of-life tire management in developing regions What is the future outlook? 13 Useful resources 14 Photo credits: © Lebanmax – Fotolia.com © www.guardian.co.uk/business/gallery/2007 Copyright: © WBCSD, November 2008 ISBN: 978-3-940388-31-5 Printer: Atar Roto Presse SA, Switzerland Printed on paper containing 50% recycled content and 50% from mainly certified forests (FSC and PEFC). 100% chlorine free. ISO 14001 certified mill. WBCSD Tire Industry Project: An introduction Today, when people think of the environmental impacts of tires, they mostly focus on the management of tires at the end of their useful lives (end-of-life tires, or ELTs), as this topic usually draws the most public attention. Globally, an estimated one billion tires reach the end of their useful lives every year. -

Texture-Based Vanishing Point Voting for Road Shape Estimation
Texture-Based Vanishing Point Voting for Road Shape Estimation Christopher Rasmussen Dept. Computer & Information Sciences University of Delaware [email protected] Abstract Many rural roads lack sharp, smoothly curving edges and a homogeneous surface appearance, hampering traditional vision-based road-following methods. However, they often have strong texture cues parallel to the road direction in the form of ruts and tracks left by other vehicles. This paper describes an unsupervised al- gorithm for following ill-structured roads in which dominant texture orientations computed with Gabor wavelet filters vote for a consensus road vanishing point lo- cation. The technique is first described for estimating the direction of straight-road segments, then extended to curved and undulating roads by tracking the vanishing point indicated by a differential “strip” of voters moving up toward the nominal vanishing line. Finally, the vanishing point is used to constrain a search for the road boundaries by maximizing texture- and color-based region discriminant func- tions. Results are shown for a variety of road scenes including gravel roads, dirt trails, and highways. 1. Introduction Many complementary strategies for visual road following have been developed based on certain assumptions about the characteristics of the road scene. For ex- ample, edge-based methods such as those described in [17, 16, 1] are often used to identify lane lines or road borders, which are fit to a model of the road curvature, width, and so on. These algorithms typically work best on well-engineered roads such as highways which are paved and/or painted, resulting in a wealth of high- contrast contours suited for edge detection. -
Final Report
Final Report Reinventing the Wheel Formula SAE Student Chapter California Polytechnic State University, San Luis Obispo 2018 Patrick Kragen [email protected] Ahmed Shorab [email protected] Adam Menashe [email protected] Esther Unti [email protected] CONTENTS Introduction ................................................................................................................................ 1 Background – Tire Choice .......................................................................................................... 1 Tire Grip ................................................................................................................................. 1 Mass and Inertia ..................................................................................................................... 3 Transient Response ............................................................................................................... 4 Requirements – Tire Choice ....................................................................................................... 4 Performance ........................................................................................................................... 5 Cost ........................................................................................................................................ 5 Operating Temperature .......................................................................................................... 6 Tire Evaluation .......................................................................................................................... -
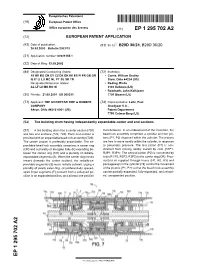
Tire Building Drum Having Independently Expandable Center and End Sections
Europäisches Patentamt *EP001295702A2* (19) European Patent Office Office européen des brevets (11) EP 1 295 702 A2 (12) EUROPEAN PATENT APPLICATION (43) Date of publication: (51) Int Cl.7: B29D 30/24, B29D 30/20 26.03.2003 Bulletin 2003/13 (21) Application number: 02021255.1 (22) Date of filing: 19.09.2002 (84) Designated Contracting States: (72) Inventors: AT BE BG CH CY CZ DE DK EE ES FI FR GB GR • Currie, William Dudley IE IT LI LU MC NL PT SE SK TR Stow, Ohio 44224 (US) Designated Extension States: • Reding, Emile AL LT LV MK RO SI 9163 Kehmen (LU) • Roedseth, John Kolbjoern (30) Priority: 21.09.2001 US 960211 7790 Bissen (LU) (71) Applicant: THE GOODYEAR TIRE & RUBBER (74) Representative: Leitz, Paul COMPANY Goodyear S.A., Akron, Ohio 44316-0001 (US) Patent-Department 7750 Colmar-Berg (LU) (54) Tire building drum having independently expandable center and end sections (57) A tire building drum has a center section (720) therebetween. In an embodiment of the invention, the and two end sections (722, 724). Each end section is bead lock assembly comprises a cylinder and two pis- provided with an expandable bead lock assembly (726). tons (P1, P2) disposed within the cylinder. The pistons The center section is preferably expandable. The ex- are free to move axially within the cylinder, in response pandable bead lock assembly comprises a carrier ring to pneumatic pressure. The first piston (P1) is con- (CR) and a plurality of elongate links (K) extending be- strained from moving axially inward by rods (R1P1, tween the carrier ring (CR) and a plurality of radially- R2P1, R3P1).