Robocon 2018 Held at the Badminton Arena of Shree Shiv Chhatrapati Sports Complex, Balewadi, Pune
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Robocon News 55
ABU ROBOCON NEWS ABU ROBOCON 2012 Hong Kong http://aburobocon2012.hk/ No. 164 Date of Issue: September 14, 2012 China got back on top at the Hong Kong Robocon! The 11th ABU ROBOCON 2012 Hong Kong was held at KITEC in Hong Kong on August 19. Total of 17 teams selected in the regional contest held in 16 countries and regions participated in the contest and unfolded heated competition. A number of teams achieved ‘Peng On Dai Gat’ from the preliminary rounds to the finals, renewing the time of achievement match after match. The spectators were wildly excited over the dramatic turnabout and the unpredictable game result. As a result, University of Electronic Science and Technology of China won the champion title and Lac Hong University of Vietnam came second, followed by Japan and Thailand. Check out the highlight of the contest at RTHK’s official website at; http://aburobocon2012.hk/ Vietnam Television will host ABU ROBOCON 2013 in Danang, Vietnam VTV’s official logo of the contest At the handover ceremony held at the Hong Kong Robocon, the ABU Robocon flag was passed from Radio Television Hong Kong to the next host organisation, Vietnam Television. Mr Phan Viet Tien, Vice President of the Vietnam Television, proudly announced that they would host the 12th ABU ROBOCON 2013 in the city of Danang, Vietnam on August 18 next year. The contest theme is ‘The Green Planet’. The theme has a message that the world citizens are responsible for protecting the earth. Each participating team creates a total of two robots, one manual robot and an automatic robot, and completes tasks in the field on which the earth is drawn. -
TPA Robocon Presentation นำเสนอ Robot 1 3 Resize สมบูรณ์
Inspiring Youth to Science &Technology via Monozukuri Inspiring Youth to S&T via Monotsukuri TPA has found a way to make our Thai Youth interested in Science and Technology via Robot contest since 1993. Plus the innovative learning style of Monozukuri by encourage our teenagers to learn from art, science, craft and joy of making things with the ultimate philosophy “to develop knowledge and enrich education so as to improve the industry, economy and society” Training Robot Contest TPA Robot Contest Thailand Championship Previous TPA Robot Contest 2009 ”Travel Together for the Victory Drums” Hosted by JAPAN Manual Robot will carry Auto Robot (assuming like using TAKO) to the assigned place. After that Manual Robot will release Auto Robot and let it track the way to the Victory Drum. Who can hit the Drum first will win the Game. 2013 ”The Green Planet” Hosed by VIETNAM Manual Robot will load 6 Trees on the Auto Robot and let Auto Robot take all Tress to the assigned place. After that Manual Robot will shoot all Trees to the Earth assuming that they have made the planting on the Earth. 2016 “Clean Energy Recharging the World” Hosted by THAILAND Eco Robot will carry Wind Turbine Propeller and be moved by wind- power sent by Hybrid Robot to 3 Slopes and Hills. Until Eco Robot reach the Wind Turbine Pole Hybrid Robot will come and take the Propeller and clime up the Pole to fix the Wind Turbine Propeller with Wind Turbine Engine on the top of Wind Turbine Pole. ถ้วยรางวลั พระราชทาน สมเดจ็ พระเทพรัตนราชสุดาฯ สยามบรมราชกมุ ารี This year Robot Contest winner will be graciously awarded by Her Royal Highness Princess Maha Chakri Sirindhorn TPA Robot Contest Thailand Championship TPA was established with the strong intention, co-operation and dedication of the Japanese alumni in 1973. -

Robocon Brochure
THE SAGA OF ROBOCON Nirma Education and Research Foundation (NERF) Renowned industrialist and philanthropist Dr Karsanbhai K Patel, the founder of the Nirma Group of Industries, established the Nirma Education and Research Foundation (NERF) in the year 1994 with a vision to promote higher education and provide excellent educational facilities to the youth in India. In 1995, Nirma Institute of Technology, affiliated to Gujarat University was established by the NERF. It was followed by the establishment of Nirma Institute of Management in 1996. In the year 2003, the Government of Gujarat approved the proposal of the NERF to found the Nirma University, Ahmedabad. Hence, the Nirma University was established under a special Act passed by the Gujarat State Legislative Assembly. The University Grants Commission (UGC) duly recognised the University under the Section 2 (f) of the UGC Act. The NERF is equally committed to school education. It strongly believes in the fact that a strong foundation is a prerequisite for education. With this philosophy, it runs two schools ‘Nirma Vidyavihar’ at Bodakdev and Chharodi in Ahmedabad, where the emphasis is laid on to provide value-based education clubbed up with innovative educational practices. About Nirma University Established in the year 2003, the Nirma University, Ahmedabad is a research-oriented, student-centric, multidisciplinary, not-for-profit state private university. Within a short period of its existence, it has emerged as a nationally renowned higher education institution. The University and its constituent institutes are highly ranked by different ranking agencies. Nirma University is duly recognised by the University Grants Commission (UGC) under Section 2 (f) of the UGC Act. -

1.Contest Outlines
1. Contest Outlines Title: ABU ASIA-PACIFIC ROBOT CONTEST 201 BANGKOK (Alias: ABU ROBOCON 2016 Bangkok Organizer: ABU (Asia-Pacific Broadcasting Union) Host: ABU Asia-Pacific Robot Contest 2016 Bangkok-Thailand Host Organizing Committee, MCOT Public Company Limited Special Sponsors: Panasonic System Networks Co., Ltd. TOYOTA MOTOR CORPORATION MABUCHI MOTOR CO., LTD. Nagase Brothers Inc. ROHM Co., Ltd. NOK Corporation Sponsors: PTT Public Company Limited Thai Life Insurance Support: Foreign Embassies in Thailand Ministry of Foreign Affairs of Thailand Airports of Thailand Thai Customs Department Immigration Bureau of Thailand Cooperation: YAMATO LOGISTICS CO.,LTD. Nippon Production Service Co., Ltd (NPS) Sports Authority of Thailand Vocational Education Commission (VEC) Technology Promotion Association (Thailand-Japan) (TPA) Contest Date: Sunday, 21 August 2016 Contest Venue: Indoor Stadium Huamark, Bangkok Schedule: Friday, 19 August Participants’ Arrival Saturday, 20 August Orientation, Test-run, Rehearsal Sunday, 21 August Contest Day Monday, 22 August Friendship Exchange Programme, ABU ROBOCON Meetings Tuesday, 23 August Participants’ Departure THEME & RULES Contest Theme: “Clean Energy Recharging the World” Competition Method: Preliminary League and Final Tournament Participants: 16 teams from 15 countries /region Awards: GRAND PRIX, 1st RUNNER-UP, 2nd RUNNER-Ups, BEST IDEA AWARD, BEST ENGINEERING AWARD, BEST DESIGN AWARD, SPECIAL AWARDS, ABU ROBOCON AWARD 2 2. Event Schedule for Team Members, Pit Crews and University Supporters Day 1 (Aug19) Day 2 (Aug20) Day 3 (Aug21) Day 4 (Aug22) Day 5 (Aug23) Friday Saturday Sunday Monday Tuesday 6:00 Breakfast Breakfast 7:45 7:45 7:00 Breakfast Transfer to venue Transfer to venue Breakfast 8:15 8:15 8:00 Robot unpacking Measurement Participants’ 9:00 9:00 9:00 arrival and Weighting and Gate opens for 9:00-11:30 transfer to the Measurement public Friendship Pack and check- hotel Exchange out by 12:00. -
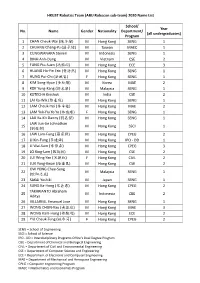
(ABU Robocon Sub-Team) 2020 Name List
HKUST Robotics Team (ABU Robocon sub-team) 2020 Name List School/ Year No. Name Gender Nationality Department/ (all undergraduates) Program 1 CHAN Cheuk-Wai (陳卓椲) M Hong Kong SENG 1 2 CHUANG Cheng-Yu (莊承諭) M Taiwan MAEC 1 3 CUNGWANARA Steven M Indonesia SENG 1 4 DINH Anh-Dung M Vietnam CSE 2 5 FUNG Piu-Suen (馮標瑄) M Hong Kong ECE 3 6 HUANG Ho-Yin Eric (黄浩然) M Hong Kong SENG 1 7 HUNG Pui-Chi (洪珮姿) F Hong Kong SENG 1 8 KIM Song-Hyun (金松顯) M Korea MAE 2 9 KOK Yung-Kang (郭永康) M Malaysia SENG 1 10 KOTECHA Kinshuk M India CSE 2 11 LAI Ka-Wik (黎嘉域) M Hong Kong SENG 1 12 LAM Cheuk-Hei (林卓禧) M Hong Kong MAE 2 13 LAM Yuk-Yiu Yo Yo (林彧瑤) F Hong Kong SENG 1 14 LAU Ka-Kit Danny (劉嘉傑) M Hong Kong SENG 1 LAW Jun-Jie Johnathan 15 M Hong Kong SSCI 1 (劉俊傑) 16 LAW Lam-Fung (羅霖鋒) M Hong Kong CPEG 2 17 LI Kin-Fung (李建鋒) M Hong Kong IPO - DD 1 18 LI Wai-Sum (李偉森) M Hong Kong CPEG 3 19 LO King-Lam (羅敬淋) M Hong Kong CSE 2 20 LUI Wing-Yan (呂穎欣) F Hong Kong CIVL 2 21 LUK Yung-Kwan (陸雍昆) M Hong Kong CSE 2 OW YONG Chee-Seng 22 M Malaysia SENG 1 (欧阳志成) 23 SAKAI Yoshiki M Japan SENG 1 24 SUNG Ka-Hong (宋嘉康) M Hong Kong CPEG 2 TAKARIANTO Abraham 25 M Indonesia CBE 2 Aditya 26 VILLAREAL Emanuel Jose M Hong Kong SENG 1 27 WONG CHUN-Kau (黃振球) M Hong Kong MAE 3 28 WONG Kam-Hung (黃錦鴻) M Hong Kong ECE 2 29 YIU Cheuk-Tung (姚卓同) F Hong Kong CPEG 2 SENG = School of Engineering SSCI = School of Science IPO - DD = Interdisciplinary Programs Office’s Dual Degree Program CBE = Department of Chemical and Biological Engineering CIVL = Department of Civil and Environmental Engineering CSE = Department of Computer Science and Engineering ECE = Department of Electronic and Computer Engineering MAE = Department of Mechanical and Aerospace Engineering CPEG = Computer Engineering Program MAEC = Mathematics and Economics Program . -

Victory for Thailand at ABU Robocon 2011 ~ ABU Robocon Award to University of Tokyo ~
Press Release Victory for Thailand at ABU Robocon 2011 ~ ABU Robocon Award to University of Tokyo ~ TOKYO, 28th August 2011 19 teams of students from 18 countries and regions competed at the ABU Asia-Pacific Robot Contest (ABU Robocon) in Bangkok, Thailand, on Sunday, 28th August. This year marks the tenth anniversary of ABU Robocon, and the venue was filled with cheering viewers and excitement as feverish as the Bangkok heat. Two universities from Thailand, which was given two representatives as a host country, made way to the final. After a heated contest, Dhurakijpundit University, which excelled in technique and accuracy, beat Kampaengphet Technical College and won the Grand Prix. Dhurakijpundit University was presented with the award and a trophy. The University of Tokyo represented Japan in Robocon for the third time. Although beaten by Dhurakijpundit University in the Quarter Final round, University of Tokyo was given the ABU Robocon Award, top honors commending preeminent ideas, originality, creativity and technology. ABU Robocon will be held in Hong Kong next year. NHK will broadcast a program “NHK Robocon 2011 Bangkok” (Working title) on its terrestrial channel (General TV) from 14:00 to 14:59 on 19th September. - 1 - Notes to editors <ABU Robocon> This contest started in 2002 at the instigation of NHK in order to cultivate young engineers and promote international friendship between the countries as well as to enhance quality of program production in Asia-Pacific region. <Rules of ABU Robocon 2011> This year’s theme was “Loy Krathong, Lighting Happiness with Friendship” in honor of a traditional festival in Thailand, Loy Krathon. -

“ROBO RUGBY 7S”
ABU Asia-Pacific Robot Contest 2020 Suva, Fiji THEME & RULES “ROBO RUGBY 7s” August 2020 ABU Asia-Pacific Robot Contest 2020 Suva, Fiji Host Organising Committee http://aburobocon2020.com.fj 1 1 ABU Robocon 2020 Suva Contest Theme “ROBO RUGBY 7s” The concept of the contest: The ABU Robocon 2020 Suva contest is to play rugby 7’s game using two robots and five obstacles as five defending players. The highlight of this game is how the two robots collaborate to score Try and the Goal Kick. The main and unique challenge of this game will be Goal Kick, kicking the Kick Ball over the cross bar of the conversion post because of the unique shape of the rugby ball. The audience will be fascinated if the robot made all the Goals successfully. We are looking forward to witnessing exciting games of unique robots built by the young budding engineers in Suva, Fiji. Based on this concept, ABU Robocon 2020 Suva is designed to promote the idea of “Rugby 7’s”. A game is between Red and Blue teams. It lasts three minutes at most. Each team has two robots known as Pass Robot (PR) and Try Robot (TR). The two robots can be either manual or automatic. The PR starts from the PR Start Zone. The PR picks up one Try Ball from the Ball Rack and passes the Try Ball from the Passing Zone to TR located in the Receiving Zone. The TR starts from the TR Start Zone and moves into the Receiving Zone to receive the Try Ball from PR. -
Robocon 2017 the LANDING DISC ROBOCON 2017 THEME and RULE BOOK
AJAY KUMAR GARG ENGINEERING COLLEGE, GHAZIABAD PROJECT REPORT ON INTERNATIONAL ROBOTICS COMPETITION 1 INDEX TITLE 1. The ABURobocon 2. ABURobocon2017 theme rulebook THE SAFETY THE DOMESTIC CONTESTS CONTEST RULES CONTEST OUTLINE GAME PROCEDURE: SETUP, START OF THE GAME, TEAM MEMBERS DURING THE GAME, HANDLING OF THE DISCS, SCORE, END OF THE GAME, DECIDING THE WINNER, RETRIES, VIOLATIONS, DISQUALIFICATIONS TEAMS ROBOT: ROBOT SIZE, ROBOT WEIGHT, ROBOT SAFETY APPENDIX: MATCHES, AWARDS DRAWINGS OF THEME/ ARENA COLOUR SPECIFICATIONS 3. THE FRIZZ GUN OUR DESIGN AND ANALYSIS COMPONENTS USED IN FINAL MODEL WORKING PROPOSED METHODOLOGY 4. CONDITION OF BOT BEFORE LEAVING FOR PUNE 5. CONDITION OF BOT AFTER REACHING PUNE 6. EVENT SUMMARY 7. PROBLEMS FACED 8. OUR ACHIEVEMENTS 9. PICTURE GALLERY ROBOCON2017@PUNE 10. CONCLUSION 11. LESSONS LEARNT 12. APPENDIX-1 : Team Member List 13. APPENDIX-2 : Student Testimonials 14. APPENDIX-3 : Main Resource Vendors 2 THE ABUROBOCON Robocon, short for Robotic Contest, is an interesting game - cum - intellectual exercise for budding engineers and their enthusiastic instructors, determined to innovate and create machines for producing desired results. Participation in this activity is an end-to-end competitive experience from concept design of a system of robots programmed to perform according to rules of the game played on a high precision technical Contest Area and to score a victory beating the competitors; all this according to a Theme declared by the Host Country. International Robocon is mainly sponsored by Asia Pacific Broadcasting Union (ABU) which includes Doordarshan (Prasarbharati) of India as a member which has been organizing all activities in India for last Nine years with collaboration with MIT Group of Institutions, Pune, India. -

Victory for Malaysia's Universiti Teknologi Malaysia at ABU Robocon
(Press Release) Victory for Malaysia’s Universiti Teknologi Malaysia at ABU Robocon BANGKOK, August 21, 2016- The 15th ABU Asia-Pacific Robot Contest (ABU Robocon) was held in Bangkok, Thai today, with 17 university teams from 16 countries and regions vying for the title of handmade robot champion. ABU Robocon is an annual contest that brings together robots designed and built by selected teams of university students in the Asia-Pacific region. It started in 2002, and is also an international program co-production in which participating TV stations air highlights of the contest from the images provided by the host broadcaster. Under this year’s theme “Clean Energy Recharging the World”, each teams use two robots, Eco and Hybrid, to go through the winding course. Eco robot, without driving force, runs three zones with zigzag river and hills by Hybrid robot’s help using wind, magnetic, or gravity force. After surviving the course, Hybrid robot climbs up the wind turbine pole and attaches propeller. Participating teams are expected to challenge creating unique robots. Today, Malaysia’s Universiti Teknologi Malaysia and China’s Northeastern University advanced to the final. The team of Malaysia has won a close match showing solid performance. This is the first victory as a Malaysian team in ABU Robocon. Meanwhile, Tokyo University represented Japan in Robocon for the fifth time. They’ve put up a brave fight, however, they were narrowly beaten in the semi-final round by Northeastern University, China. NHK will broadcast the contest in nationwide program, “ABU Robocon 2016”. It is scheduled to be aired on NHK GTV (terrestrial channel) on Thursday, September 22. -
Report on Aburobocon-2016
Date: 3 – 5 March, 2016 Basic-Introduction about the competition The Asia-Pacific Robot Contest (ABU Robocon) is an Asian Oceania College robot competition, founded in 2002 by Asia-Pacific Broadcasting Union. In the competition, robots compete to complete a task within a set period. The contest aims to create friendship among young people with similar interests who will lead their countries in the 21st century, as well as help advance engineering and broadcasting technologies in the region. The event is broadcasted in many countries through ABU member broadcasters. Robotic Contests (Robocon) organised by Asia Pacific Broadcasting Union (ABU) and its member countries including Doordasrshan (Prasarbharati) of India offer young engineers a platform to innovate and excel in creative thinking. Here, they demonstrate their technical ideas in robotics, as well as establish cross cultural contacts in an environment. These events also offer great opportunity to broadcasting agencies for advancing their technological skills and international cooperation. The Abu Robocon-2016 will be held at Bangkok, Thailand. The theme is "Clean Energy Recharging the World". The concept behind the theme is the utilization of renewable energy sources, the theme is available at the match is between 2 teams (viz. red and blue), each team consisting of two robots. The game of ABU Robocon 2016 is designed in order to create the awareness of efficient energy consumption and clean and renewable energy utilization. Each team has to build two robots; Eco Robot and Hybrid Robot. Eco Robot doesn’t have an actuator to drive. It receives the driving energy from Hybrid Robot. Eco Robot has to use only one steering actuator to control its direction, to track the path containing Slopes and Hills, River, and Down Hill. -

Developing Robots for Daily Life to Help out by Japan’S Most Famous Twentieth- with Jobs Such As Carrying Heavy Things Or Moving Century Cartoonist, Tezuka Osamu
Japanese Culture Now http://www.tjf.or.jp/takarabako/ A robot running around with children, a robot playing a Developing Robots musical instrument, a robot missing the bus—robots have recently begun to appear on television commercials and at event sites in Japan, where research and development for Daily Life of humanoid robots is active and advanced. And not only researchers but an increasing number of amateurs, too, are enthusiastic about making robots. In this issue we report on the robot scene in Japan. What is a Robot? The word “robot,” derived from the Czechoslovakian word robota vices called “robots” today are extremely diverse in both shape and (worker), was first used in the play “R.U.R.” (Rossum’s Universal function. For example, the robots that work in manufacturing plants Robots) first performed in Czechoslovakia in 1920. Robots appeared mainly perform a certain task programmed into them by human in the play as artificial humans who function only as workers. A operators and are usually shaped something like a human arm. Ro- robot in female guise appeared in “Metropolis,” a movie made in bots that help with rescue operations at disaster sites include those Germany in 1927. Both “R.U.R.” and “Metropolis” were box office that move away debris and other obstacles through manipulation hits, firmly establishing the idea of the robot (a humanoid machine via remote control, as well as self-controlled robots that can get that works for human beings) in the popular consciousness. around obstacles in their path and search for victims, thus assessing Exactly what a robot is, nevertheless, is not clearly defined. -

Ong Wee Hong Assistant Professor, Digital Science Universiti Brunei Darussalam Contact and Personal Information Email Address: [email protected] | [email protected]
Ong Wee Hong Assistant Professor, Digital Science Universiti Brunei Darussalam Contact and Personal Information Email address: [email protected] | [email protected] Website: https://ailab.space Contact address: Universiti Brunei Darussalam Faculty of Science Jalan Tungku Link, Gadong BE1410 Brunei Darussalam Date of birth: 13 October 1972 Race: Chinese Nationality: Brunei Citizen Gender: Male Marital status: Married Languages: Hokkien (mother tongue), Mandarin, Cantonese, English, Malay Summary Position: Assistant Professor Affiliation: Universiti Brunei Darussalam Education: PhD (2014), MSc (2004), PGCTE (1999), BEng (1997), BTEC HND (1994), BTEC NC (1992) Research areas: Personal robotics, cyber-physical systems, ambient intelligence Teaching areas: Computer systems, artificial intelligence, robotics Academic and Google Scholar: Documents 19, Citations 70, h-index 6 research Scopus: Documents 12, Citations 28, h-index 3 contributions: Supervisions: PhD 1 completed, 4 on-going | MSc 1 completed, 3 on-going | Undergraduate senior projects 27 completed, 2 on-going Years of teaching: 23 years, starting from 1998 Years as university faculty member: 14 years, starting from 2007 Professional membership: Member, IEEE since 1998 Awards, medals Pingat Indah Kerja Baik (PIKB, Meritorious Service Medal), Brunei, 2017 and other recognitions: Education 2014 Doctor of Engineering (PhD) in Electrical Engineering and Information Systems The University of Tokyo, Japan • Thesis: “Autonomous Human Activity Recognition based on a Novel Incremental 1 Ong