Noncoherence of Arithmetic Hyperbolic Lattices
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Arxiv:Math/0511624V1
Automorphism groups of polycyclic-by-finite groups and arithmetic groups Oliver Baues ∗ Fritz Grunewald † Mathematisches Institut II Mathematisches Institut Universit¨at Karlsruhe Heinrich-Heine-Universit¨at D-76128 Karlsruhe D-40225 D¨usseldorf May 18, 2005 Abstract We show that the outer automorphism group of a polycyclic-by-finite group is an arithmetic group. This result follows from a detailed structural analysis of the automorphism groups of such groups. We use an extended version of the theory of the algebraic hull functor initiated by Mostow. We thus make applicable refined methods from the theory of algebraic and arithmetic groups. We also construct examples of polycyclic-by-finite groups which have an automorphism group which does not contain an arithmetic group of finite index. Finally we discuss applications of our results to the groups of homotopy self-equivalences of K(Γ, 1)-spaces and obtain an extension of arithmeticity results of Sullivan in rational homo- topy theory. 2000 Mathematics Subject Classification: Primary 20F28, 20G30; Secondary 11F06, 14L27, 20F16, 20F34, 22E40, 55P10 arXiv:math/0511624v1 [math.GR] 25 Nov 2005 ∗e-mail: [email protected] †e-mail: [email protected] 1 Contents 1 Introduction 4 1.1 Themainresults ........................... 4 1.2 Outlineoftheproofsandmoreresults . 6 1.3 Cohomologicalrepresentations . 8 1.4 Applications to the groups of homotopy self-equivalences of spaces 9 2 Prerequisites on linear algebraic groups and arithmetic groups 12 2.1 Thegeneraltheory .......................... 12 2.2 Algebraicgroupsofautomorphisms. 15 3 The group of automorphisms of a solvable-by-finite linear algebraic group 17 3.1 The algebraic structure of Auta(H)................ -
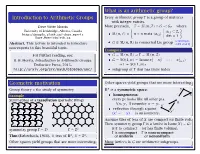
Introduction to Arithmetic Groups What Is an Arithmetic Group? Geometric
What is an arithmetic group? Introduction to Arithmetic Groups Every arithmetic group is a group of matrices with integer entries. Dave Witte Morris More precisely, SLΓ(n, Z) G : GZ where " ∩ = University of Lethbridge, Alberta, Canada ai,j Z, http://people.uleth.ca/ dave.morris SL(n, Z) nΓ n mats (aij) ∈ ∼ = " × # det 1 $ [email protected] # = # semisimple G SL(n, R) is connected Lie# group , Abstract. This lecture is intended to introduce ⊆ # def’d over Q non-experts to this beautiful topic. Examples For further reading, see: G SL(n, R) SL(n, Z) = ⇒ = 2 2 2 D. W. Morris, Introduction to Arithmetic Groups. G SO(1, n) Isom(x1 x2 xn 1) = = Γ − − ···− + Deductive Press, 2015. SO(1, n)Z ⇒ = http://arxiv.org/src/math/0106063/anc/ subgroup of that has finite index Γ Dave Witte Morris (U of Lethbridge) Introduction to Arithmetic Groups Auckland, Feb 2020 1 / 12 Dave Witte Morris (U of Lethbridge) Introduction to Arithmetic Groups Auckland, Feb 2020 2 / 12 Γ Geometric motivation Other spaces yield groups that are more interesting. Group theory = the study of symmetry Rn is a symmetric space: y Example homogeneous: x Symmetries of a tessellation (periodic tiling) every pt looks like all other pts. x,y, isometry x ! y. 0 ∀ ∃ x0 reflection through a point y0 (x+ x) is an isometry. = − Assume tiles of tess of X are compact (or finite vol). Then symmetry group is a lattice in Isom(X) G: = symmetry group Z2 Z2 G/ is compact (or has finite volume). = " is cocompact Γis noncocompact Thm (Bieberbach, 1910). -

Volumes of Arithmetic Locally Symmetric Spaces and Tamagawa Numbers
Volumes of arithmetic locally symmetric spaces and Tamagawa numbers Peter Smillie September 10, 2013 Let G be a Lie group and let µG be a left-invariant Haar measure on G. A discrete subgroup Γ ⊂ G is called a lattice if the covolume µG(ΓnG) is finite. Since the left Haar measure on G is determined uniquely up to a constant factor, this definition does not depend on the choice of the measure. If Γ is a lattice in G, we would like to be able to compute its covolume. Of course, this depends on the choice of µG. In many cases there is a canonical choice of µ, or we are interested only in comparing volumes of different lattices in the same group G so that the overall normalization is inconsequential. But if we don't want to specify µG, we can still think of the covolume as a number which depends on µG. That is to say, the covolume of ∗ a particular lattice Γ is R -equivariant function from the space of left Haar measures on G ∗ to the group R ={±1g. Of course, a left Haar measure on a Lie group is the same thing as a left-invariant top form which corresponds to a top form on the Lie algebra of G. This is nice because the space of top forms on Lie(G) is something we can get our hands on. For instance, if we have a rational structure on the Lie algebra of G, then we can specify the covolume of Γ uniquely up to rational multiple. -

Why Arithmetic Groups Are Lattices a Short Proof for Some Lattices
Recall is a lattice in G means Why arithmetic groups are lattices is a discrete subgroup of G, and Γ G/ has finite volume (e.g., compact) Dave Witte Morris Γ RemarkΓ University of Lethbridge, Alberta, Canada http://people.uleth.ca/ dave.morris M = hyperbolic 3-manifold of finite volume (e.g., compact) ∼ M h3/ , where = (torsion-free) lattice in SO(1, 3). [email protected] ⇐⇒ = More generally: Γ Γ Abstract. SL(n, Z) is the basic example of a lattice in SL(n, R), and a locally symmetric space of finite volume lattice in any other semisimple Lie group G can be obtained by (torsion-free) lattice in semisimple Lie group G intersecting (a copy of) G with SL(n, Z). We will discuss the main ideas ←→ behind three different approaches to proving the important fact that the integer points do form a lattice in G. So it would be nice to have an easy way to make lattices. Dave Witte Morris (Univ. of Lethbridge) Why arithmetic groups are lattices U of Chicago (June 2010) 1 / 19 Dave Witte Morris (Univ. of Lethbridge) Why arithmetic groups are lattices U of Chicago (June 2010) 2 / 19 Example Theorem (Siegel, Borel & Harish-Chandra, 1962) SL(n, Z) is a lattice in SL(n, R) G is a (connected) semisimple Lie group G ! SL(n, R) SL(n, Z) is the basic example of an arithmetic group. G is defined over Q i.e. G is defined by polynomial equations with Q coefficients More generally: i.e. Lie algebra of G is defined by linear eqs with Q coeffs For G SL(n, R) (with some technical conditions): i.e. -
![Math.GR] 19 May 2019](https://docslib.b-cdn.net/cover/3001/math-gr-19-may-2019-2893001.webp)
Math.GR] 19 May 2019
Épijournal de Géométrie Algébrique epiga.episciences.org Volume 3 (2019), Article Nr. 6 p-adic lattices are not Kähler groups Bruno Klingler Abstract. We show that any lattice in a simple p-adic Lie group is not the fundamental group of a compact Kähler manifold, as well as some variants of this result. Keywords. Kähler groups; lattices in Lie groups 2010 Mathematics Subject Classification. 57M05; 32Q55 [Français] Titre. Les réseaux p-adiques ne sont pas des groupes kählériens Résumé. Dans cette note, nous montrons qu’un réseau d’un groupe de Lie p-adique simple n’est pas le groupe fondamental d’une variété kählérienne compacte, ainsi que des variantes de ce résultat. arXiv:1710.07945v3 [math.GR] 19 May 2019 Received by the Editors on September 21, 2018, and in final form on January 22, 2019. Accepted on March 21, 2019. Bruno Klingler Humboldt-Universität zu Berlin, Germany e-mail: [email protected] B.K.’s research is supported by an Einstein Foundation’s professorship © by the author(s) This work is licensed under http://creativecommons.org/licenses/by-sa/4.0/ 2 1. Results Contents 1. Results ................................................... 2 2. Reminder on lattices ........................................... 3 3. Proof of Theorem 1.1 ........................................... 4 1. Results 1.A. A group is said to be a Kähler group if it is isomorphic to the fundamental group of a connected compact Kähler manifold. In particular such a group is finitely presented. As any finite étale cover of a compact Kähler manifold is still a compact Kähler manifold, any finite index subgroup of a Kähler group is a Kähler group. -

GENERATORS for ARITHMETIC GROUPS 1. Introduction in This
GENERATORS FOR ARITHMETIC GROUPS R. SHARMA AND T. N. VENKATARAMANA Abstract. We prove that any non-cocompact irreducible lattice in a higher rank real semi-simple Lie group contains a subgroup of finite index which is generated by three elements. 1. Introduction In this paper we study the question of giving a small number of generators for an arithmetic group. The question of a small number of generators is also motivated by the congruence subgroup problem (abbreviated to CSP in the sequel). Our main theorem says that if Γ is a higher rank arithmetic group, which is non-uniform, then Γ has a finite index subgroup which has at most THREE generators. Our proof makes use of the methods and results of [T] and [R 4] on certain unipotent generators for non-uniform arithmetic higher rank groups, as also the classification of absolutely simple groups over num- ber fields. Let G be a connected semi-simple algebraic group over Q. Assume that G is Q-simple i.e. that G has no connected normal algebraic subgroups defined over Q. Suppose further, that R-rank(G) 2. Let Γ be a subgroup of finite index in G(Z). We will refer to Γ as a≥\higher rank" arithmetic group. Assume moreover, that Γ is non-uniform, that is, the quotient space G(R)=Γ is not compact. With this notation, we prove the following theorem, the main theorem of this paper. Theorem 1. Every higher rank non-uniform arithmetic group Γ has a subgroup Γ0 of finite index which is generated by at the most three elements. -
An Introduction to Arithmetic Groups (Via Group Schemes)
An introduction to arithmetic groups (via group schemes) Ste↵en Kionke 02.07.2020 Content Properties of arithmetic groups Arithmetic groups as lattices in Lie groups Last week Let G be a linear algebraic group over Q. Definition: A subgroup Γ G(Q) is arithmetic if it is commensurable to ✓ G0(Z) for some integral form G0 of G. integral form: a group scheme G0 over Z with an isomorphism EQ/Z(G0) ⇠= G. Recall: Here group schemes are affine and of finite type. S-arithmetic groups S: a finite set of prime numbers. 1 ZS := Z p S p | 2 Definition: ⇥ ⇤ A subgroup Γ G(Q) is S-arithmetic if it is commensurable to ✓ G0(ZS) for some integral form G0 of G. - " over bretter : afvm Ks „ t : replace 2 by Ep [ ] Sir= Q by Fpk ) Properties of arithmetic groups Theorem 2: Let Γ G(Q) be an arithmetic group. ✓ * 1 Γ is residually finite. 2 Γ is virtually torsion-free. To Torsion -free % !! with 3 Γ has only finitely many conjugacy classes of finite subgroups. ③ ⇒ finitely many iso classes of finite subgroups Er ⇒ E- finite Es !> leg F isomorph:c to asuboraarp 4 Γ is finitely presented. µ ↳ Fa P is aftype Proof: Γ virtually torsion-free Assume Γ=G0(Z). Claim: G0(Z,b) is torsion-free for b 3. ≥ G0(Z,mby)=ker G0(Z) G0(Z/bZ) ! Suppose g G0(Z,b) has finite order > 1. 2 Vlog ordlg) =p Prime Etbh G : → 2 g- h:&] ? 2-linear Assuwe his out Proof: Γ virtually torsion-free g = " + bh with h: G0 Z onto. -

Arithmeticity of Groups Zn Z
Arithmeticity of groups Zn o Z Bena Tshishiku September 13, 2020 Abstract n We study when the group Z oAZ is arithmetic, where A 2 GLn(Z) is hyper- bolic and semisimple. We begin by giving a characterization of arithmeticity phrased in the language of algebraic tori, building on work of Grunewald{ Platonov. We use this to prove several more concrete results that relate the n arithmeticity of Z oA Z to the reducibility properties of the characteristic poly- nomial of A. Our tools include algebraic tori, representation theory of finite groups, Galois theory, and the inverse Galois problem. 1 Introduction This paper focuses on the following question. n Question 1. Fix A 2 GLn(Z). When is the semidirect product ΓA := Z oA Z an arithmetic group? Recall that a group Γ is called arithmetic if it embeds in an algebraic group G defined over Q with image commensurable to G(Z). Standing assumption. We restrict focus to the generic case when A is hyperbolic (no eigenvalues on the unit circle) and semisimple (diagonalizable over C). With the standing assumption, Question 1 can be answered in terms of the eigen- n1 nm values of A as follows. Let χ(A) = µ1 ··· µm be the characteristic polynomial, decomposed into irreducible factors over Q. Choose a root λi of µi, and view it as an element in (the Z-points of) the algebraic torus RQ(λi)=Q(Gm), where Gm is the multiplicative group and RK=Q(·) denotes the restriction of scalars. Theorem A (Arithmeticity criterion). Fix A 2 GLn(Z) hyperbolic and semisimple, n1 nm with characteristic polynomial χ(A) = µ1 ··· µm and fix eigenvalues λ1; : : : ; λm, as above. -

Discrete Subgroups of Lie Groups
Discrete subgroups of Lie groups Michael Kapovich (University of California, Davis), Gregory Margulis (Yale University), Gregory Soifer (Bar Ilan University), Dave Witte Morris (University of Lethbridge) December 9, 2019–December 13, 2019 1 Overview of the Field Recent years have seen a great deal of progress in our understanding of “thin” subgroups, which are dis- crete matrix groups that have infinite covolume in their Zariski closure. (The subgroups of finite covolume are called “lattices” and, generally speaking, are much better understood.) Traditionally, thin subgroups are required to be contained in arithmetic lattices, which is natural in the context of number-theoretic and al- gorithmic problems but, from the geometric or dynamical viewpoint, is not necessary. Thin subgroups have deep connections with number theory (see e.g. [6, 7, 8, 18, 22]), geometry (e.g. [1, 14, 16, 38]), and dynamics (e.g. [3, 23, 27, 29]). The well-known “Tits Alternative” [44] (based on the classical “ping-pong argument” of Felix Klein) constructs free subgroups of any matrix group that is not virtually solvable. (In most cases, it is easy to arrange that the resulting free group is thin.) Sharpening and refining this classical construction is a very active and fruitful area of research that has settled numerous old problems. For instance, Breuillard and Gelander [11] proved a quantitative form of the Tits Alternative, which shows that the generators of a free subgroup can be chosen to have small word length, with respect to any generating set of the ambient group. Kapovich, Leeb and Porti [26] provided a coarse-geometric proof of the existence of free subgroups that are Anosov. -

The Diffeomorphism Group of a K3 Surface and Nielsen Realization 3
The diffeomorphism group of a K3 surface and Nielsen realization Jeffrey GIANSIRACUSA Institut des Hautes Etudes´ Scientifiques 35, route de Chartres 91440 – Bures-sur-Yvette (France) Septembre 2007 IHES/M/07/32 THE DIFFEOMORPHISM GROUP OF A K3 SURFACE AND NIELSEN REALIZATION JEFFREY GIANSIRACUSA Abstract. We use moduli spaces of various geometric structures on a mani- fold M to probe the cohomology of the diffeomorphism group and mapping class group of M. The general principle is that existence of a moduli problem for which the Teichm¨uller space resembles a point implies that the homomorphism from the diffeomorphism group (or the mapping class group) to an appropriate discrete group resembles a retraction after applying the classifying space func- tor. Our main application of this idea is for K4 a K3 surface; here the maps 2 2 BDiff(K) → BAut(H (K; Z)) and Bπ0Diff(K) → BAut(H (K; Z)) are injec- tive on real cohomology in degrees ∗ ≤ 9. The work of Borel and Matsushima determines the real cohomology of BAut(H2(K; Z)) in these degrees. Using the above injections, the Borel classes provide cohomological obstructions to a gen- eralized Nielsen realization problem which asks when subgroups of the mapping class group can be lifted to the diffeomorphism group. We conclude that the homomorphism Diff(M) → π0Diff(M) does not admit a section if M contains a K3 surface as a connected summand. 1. Introduction Let M be a smooth closed oriented manifold. We write Diff(M) for the group of orientation preserving C∞ diffeomorphisms of M. It is a topological group with the C∞ Fr´echet topology. -

A Miyawaki Type Lift for $$\Textit{Gspin} (2,10)$$ Gspin ( 2 , 10 )
A Miyawaki type lift for $$\textit{GSpin} (2,10)$$ GSpin ( 2 , 10 ) Henry H. Kim & Takuya Yamauchi Mathematische Zeitschrift ISSN 0025-5874 Math. Z. DOI 10.1007/s00209-017-1895-y 1 23 Your article is protected by copyright and all rights are held exclusively by Springer- Verlag Berlin Heidelberg. This e-offprint is for personal use only and shall not be self- archived in electronic repositories. If you wish to self-archive your article, please use the accepted manuscript version for posting on your own website. You may further deposit the accepted manuscript version in any repository, provided it is only made publicly available 12 months after official publication or later and provided acknowledgement is given to the original source of publication and a link is inserted to the published article on Springer's website. The link must be accompanied by the following text: "The final publication is available at link.springer.com”. 1 23 Author's personal copy Math. Z. DOI 10.1007/s00209-017-1895-y Mathematische Zeitschrift A Miyawaki type lift for GSpin(2, 10) Henry H. Kim1,2 · Takuya Yamauchi3 Received: 4 May 2016 / Accepted: 4 April 2017 © Springer-Verlag Berlin Heidelberg 2017 Abstract Let T2 (resp. T) be the Hermitian symmetric domain of Spin(2, 10) (resp. E7,3). In previous work (Compos. Math 152(2):223–254, 2016), we constructed holomorphic cusp forms on T from elliptic cusp forms with respect to SL2(Z). By using such cusp forms we construct holomorphic cusp forms on T2 which are similar to Miyawaki lift constructed by Ikeda (Duke Math J 131:469–497, 2006) in the context of symplectic groups. -

Arithmetic Groups (Banff, Alberta, April 14–19, 2013) Edited by Kai-Uwe Bux, Dave Witte Morris, Gopal Prasad, and Andrei Rapinchuk
Arithmetic Groups (Banff, Alberta, April 14–19, 2013) edited by Kai-Uwe Bux, Dave Witte Morris, Gopal Prasad, and Andrei Rapinchuk Abstract. We present detailed summaries of the talks that were given during a week- long workshop on Arithmetic Groups at the Banff International Research Station in April 2013, organized by Kai-Uwe Bux (University of Bielefeld), Dave Witte Morris (University of Lethbridge), Gopal Prasad (University of Michigan), and Andrei Rapinchuk (University of Virginia). The vast majority of these reports are based on abstracts that were kindly provided by the speakers. Video recordings of lectures marked with the symbol ⊲ are available online at http://www.birs.ca/events/2013/5-day-workshops/13w5019/videos/ Contents 1 1. Introduction and Overview The theory of arithmetic groups deals with groups of matrices whose entries are integers, or more generally, S-integers in a global field. This notion has a long history, going back to the work of Gauss on integral quadratic forms. The modern theory of arithmetic groups retains its close connection to number theory (for example, through the theory of automorphic forms) but also relies on a variety of methods from the theory of algebraic groups, particularly over local and global fields (this area is often referred to as the arithmetic theory of algebraic groups), Lie groups, algebraic geometry, and various aspects of group theory (primarily, homological methods and the theory of profinite groups). At the same time, results about arithmetic groups have numerous applications in differential and hyperbolic geometry (as the fundamental groups of many important manifolds often turn out to be arithmetic), combinatorics (expander graphs), and other areas.