Linearized Dynamics Equations for the Balance and Steer of a Bicycle: a Benchmark and Review
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1 Portraits Leonhard Euler Daniel Bernoulli Johann-Heinrich Lambert
Portraits Leonhard Euler Daniel Bernoulli Johann-Heinrich Lambert Compiled and translated by Oscar Sheynin Berlin, 2010 Copyright Sheynin 2010 www.sheynin.de ISBN 3-938417-01-3 1 Contents Foreword I. Nicolaus Fuss, Eulogy on Leonhard Euler, 1786. Translated from German II. M. J. A. N. Condorcet, Eulogy on Euler, 1786. Translated from French III. Daniel Bernoulli, Autobiography. Translated from Russian; Latin original received in Petersburg in 1776 IV. M. J. A. N. Condorcet, Eulogy on [Daniel] Bernoulli, 1785. In French. Translated by Daniel II Bernoulli in German, 1787. This translation considers both versions V. R. Wolf, Daniel Bernoulli from Basel, 1700 – 1782, 1860. Translated from German VI. Gleb K. Michajlov, The Life and Work of Daniel Bernoullli, 2005. Translated from German VII. Daniel Bernoulli, List of Contributions, 2002 VIII. J. H. S. Formey, Eulogy on Lambert, 1780. Translated from French IX. R. Wolf, Joh. Heinrich Lambert from Mühlhausen, 1728 – 1777, 1860. Translated from German X. J.-H. Lambert, List of Publications, 1970 XI. Oscar Sheynin, Supplement: Daniel Bernoulli’s Instructions for Meteorological Stations 2 Foreword Along with the main eulogies and biographies [i, ii, iv, v, viii, ix], I have included a recent biography of Daniel Bernoulli [vi], his autobiography [iii], for the first time translated from the Russian translation of the Latin original but regrettably incomplete, and lists of published works by Daniel Bernoulli [vii] and Lambert [x]. The first of these lists is readily available, but there are so many references to the works of these scientists in the main texts, that I had no other reasonable alternative. -

New General Principle of Mechanics and Its Application to General Nonideal Nonholonomic Systems
New General Principle of Mechanics and Its Application to General Nonideal Nonholonomic Systems Firdaus E. Udwadia1 Abstract: In this paper we develop a general minimum principle of analytical dynamics that is applicable to nonideal constraints. The new principle encompasses Gauss’s Principle of Least Constraint. We use this principle to obtain the general, explicit, equations of motion for holonomically and/or nonholonomically constrained systems with non-ideal constraints. Examples of a nonholonomically constrained system where the constraints are nonideal, and of a system with sliding friction, are presented. DOI: 10.1061/͑ASCE͒0733-9399͑2005͒131:4͑444͒ CE Database subject headings: Constraints; Equations of motion; Mechanical systems; Friction. Introduction ments. Such systems have, to date, been left outside the perview of the Lagrangian framework. As stated by Goldstein ͑1981, p. The motion of complex mechanical systems is often mathemati- 14͒ “This ͓total work done by forces of constraint equal to zero͔ cally modeled by what we call their equations of motion. Several is no longer true if sliding friction is present, and we must exclude formalisms ͓Lagrange’s equations ͑Lagrange 1787͒, Gibbs– such systems from our ͓Lagrangian͔ formulation.” And Pars Appell equations ͑Gibbs 1879, Appell 1899͒, generalized inverse ͑1979͒ in his treatise on analytical dynamics writes, “There are in equations ͑Udwadia and Kalaba 1992͔͒ have been developed for fact systems for which the principle enunciated ͓D’Alembert’s obtaining the equations of motion for such structural and me- principle͔… does not hold. But such systems will not be consid- chanical systems. Though these formalisms do not all afford the ered in this book.” Newtonian approaches are usually used to deal same ease of use in any given practical situation, they are equiva- with the problem of sliding friction ͑Goldstein 1981͒. -

On Stability Problem of a Top Rendiconti Del Seminario Matematico Della Università Di Padova, Tome 68 (1982), P
RENDICONTI del SEMINARIO MATEMATICO della UNIVERSITÀ DI PADOVA V. V. RUMJANTSEV On stability problem of a top Rendiconti del Seminario Matematico della Università di Padova, tome 68 (1982), p. 119-128 <http://www.numdam.org/item?id=RSMUP_1982__68__119_0> © Rendiconti del Seminario Matematico della Università di Padova, 1982, tous droits réservés. L’accès aux archives de la revue « Rendiconti del Seminario Matematico della Università di Padova » (http://rendiconti.math.unipd.it/) implique l’accord avec les conditions générales d’utilisation (http://www.numdam.org/conditions). Toute utilisation commerciale ou impression systématique est constitutive d’une infraction pénale. Toute copie ou impression de ce fichier doit conte- nir la présente mention de copyright. Article numérisé dans le cadre du programme Numérisation de documents anciens mathématiques http://www.numdam.org/ On Stability Problem of a Top. V. V. RUMJANTSEV (*) This paper deals with the stability of a heavy gyrostate [1] on a horizontal plane. The gyrostate is considered as a rigid body with a rotor rotating freely (without friction) about an axis invariably con- nected with the body leaning on a plane by a convex surface, i.e. the top in a broad sence of this word. For mechanician the top is a symple and principal object of study [2] attracting investigators’ attention. 1. Let $ql be the fixed coordinate system with the origin in some point of a horizontal plane and vertically up directed axis I with unit vector y; OXIX2Xa is the coordinate system rigidly connected with the body with the origin in centre of mass of gyrostate and axis ~3 coincided with one of its principal central axes of inertia. -

Building a Motorized Drift Trike Hayden Pegley
Building a Motorized Drift Trike Hayden Pegley ASR - F Block - 5/17/2017 Abstract: The goal of this project was to create an affordable motorized drift trike using a hand-welded steel frame, the front half of a used mountain bike, and a 6.5 hp, 212 cc Predator gas engine. The back frame of the trike was welded over the course of several weeks, and components including the axle, front wheel, and throttle system were added after the frame’s completion. While the trike is not fully operational, the throttle system is functional and the trike is near completion. Introduction, Motivation, and History During my freshman year, while conducting an experiment in the Whitaker Lab, I stumbled upon a go kart that an ASR student had recently completed. I was fascinated by the idea of making an operational automobile during high school. I promised myself then and there that I would take ASR and make a go kart of my own for my second semester project. However, as I began the initial research stages for my project and read previous students’ papers, it became clear that making a go kart would not be an original idea. I determined the two aspects of a go kart that made it appealing to me, those being that is was fun and motorized, and continued my search for an alternative project. It was on a go kart parts website that the phrase “drift trike” first popped up. After watching videos of people bombing hills on motorless drift trikes, I was led to multiple instructional videos on how to outfit a drift trike with a gas engine for flatland use [1]. -

On the Foundations of Analytical Dynamics F.E
International Journal of Non-Linear Mechanics 37 (2002) 1079–1090 On the foundations of analytical dynamics F.E. Udwadiaa; ∗, R.E. Kalabab aAerospace and Mechanical Engineering, Civil Engineering, Mathematics, and Information and Operations Management, 430K Olin Hall, University of Southern California, Los Angeles, CA 90089-1453, USA bBiomedical Engineering and Economics, University of Southern California, Los Angeles, CA 90089, USA Abstract In this paper, we present the general structure for the explicit equations of motion for general mechanical systems subjected to holonomic and non-holonomic equality constraints. The constraints considered here need not satisfy D’Alembert’s principle, and our derivation is not based on the principle of virtual work. Therefore, the equations obtained here have general applicability. They show that in the presence of such constraints, the constraint force acting on the systemcan always be viewed as madeup of the sumof two components.The explicit formfor each of the two components is provided. The ÿrst of these components is the constraint force that would have existed, were all the constraints ideal; the second is caused by the non-ideal nature of the constraints, and though it needs speciÿcation by the mechanician and depends on the particular situation at hand, this component nonetheless has a speciÿc form. The paper also provides a generalized formof D’Alembert’sprinciple which is then used to obtain the explicit equations of motion for constrained mechanical systems where the constraints may be non-ideal. We show an example where the new general, explicit equations of motion obtained in this paper are used to directly write the equations of motion for describing a non-holonomically constrained system with non-ideal constraints. -

Victorian Rider Handbook Part 2
Keep away from troubles 46 Keep a grip 54 Riding at night 58 Loading up 62 Riding in a group 66 Looking after your bike 70 Staying Alive 44 Staying Alive Staying Alive Anticipation and skill make riding safer and enjoyable The one thing above all others that will keep you safer on the road is your attitude. You can learn as many skills as you like, and be the most technically skilled rider around, but you can throw it all away because you can’t be bothered thinking before you act. Make no mistake about it, the road is a dangerous place, especially on a bike. Staying alive while you are out there is your responsibility. You will find the VicRoads booklet,Discover Safe Riding, a useful guide for developing your skills. 45 Keep away from trouble It might sound simple, but what can’t get at you can’t hurt you. So it makes sense to stay as far away as possible from the things that can hurt you on the road. Survival space The consequences of an error, yours or someone else’s, can be very serious for you as a rider. Survival space is the best protection you can have. The more space you have around you, the more time you have to see trouble and work out a way of avoiding it. Of course, that only works if you keep your eyes open and your mind alert. In front This is the distance between your bike and the vehicle you are following, and you have control over it. -

Recent Advances in Multi-Body Dynamics and Nonlinear Control
Recent Advances in Multi-body Dynamics and Nonlinear Control Recent Advances in Multi-body Firdaus E. Udwadia Dynamics and Nonlinear Control Aerospace and Mechanical Engineering This paper presents some recent advances in the dynamics and control of constrained Civil Engineering,, Mathematics multi-body systems. The constraints considered need not satisfy D’Alembert’s principle Systems Architecture Engineering and therefore the results are of general applicability. They show that in the presence of and Information and Operations Management constraints, the constraint force acting on the multi-body system can always be viewed as University of Southern California, Los Angeles made up of the sum of two components whose explicit form is provided. The first of these CA 90089-1453 components consists of the constraint force that would have existed were all the [email protected] constraints ideal; the second is caused by the non-ideal nature of the constraints, and though it needs specification by the mechanician who is modeling the specific system at hand, it nonetheless has a specific form. The general equations of motion obtained herein provide new insights into the simplicity with which Nature seems to operate. They are shown to provide new and exact methods for the tracking control of highly nonlinear mechanical and structural systems without recourse to the usual and approximate methods of linearization that are commonly in use. Keywords : Constrained motion, multi-body dynamics, explicit equations of motion, exact tracking control of nonlinear systems In this paper we extend these results along two directions. First, Introduction we extend D’Alembert’s Principle to include constraints that may be, in general, non-ideal so that the forces of constraint may The general problem of obtaining the equations of motion of a therefore do positive, negative, or zero work under virtual constrained discrete mechanical system is one of the central issues displacements at any given instant of time during the motion of the in multi-body dynamics. -

Engineering Balance: the Conceptual Approach by Jonathan E
Engineering Balance: The Conceptual Approach by Jonathan E. Abbott Submitted to the Department of Mechanical Engineering in partial fulfillment of the requirements for the degree of Bachelor of Engineering in Mechanical Engineering at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY February 2014 © Jonathan E. Abbott, MMXIV. All rights reserved. The author hereby grants to MIT permission to reproduce and to distribute publicly paper and electronic copies of this thesis document in whole or in part in any medium now known or hereafter created. Author.............................................................. Department of Mechanical Engineering January 17, 2014 Certified by. Anette (Peko) Hosoi Professor of Mechanical Engineering Thesis Supervisor Accepted by . Anette (Peko) Hosoi Professor of Mechanical Engineering Chairman, Department Committee on Undergraduate Theses 2 Engineering Balance: The Conceptual Approach by Jonathan E. Abbott Submitted to the Department of Mechanical Engineering on January 17, 2014, in partial fulfillment of the requirements for the degree of Bachelor of Engineering in Mechanical Engineering Abstract This work presents a view of balance useful for mechanical engineers. Mechanical engineers often need to make quick intelligent decisions using conceptual and physi- cal understanding. The typical mechanical engineering instruction usually provides a good basis for \back of the envelope" calculations, especially for mechanical systems; however, one exception to this case is in the field of dynamics and control. Dynam- ics and control is generally taught with much math, modelling most systems with differential equations. Although math is useful for designing control systems, when designing products for people who act as sophisticated controllers the engineer needs a more general understanding of balance. This work presents a conceptual intuitive way to break the act of balance into distinct mechanisms and thereby quickly evaluate how a system balances. -

Explicit Equations of Motion for Constrained
Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics Firdaus Udwadia, Phailaung Phohomsiri To cite this version: Firdaus Udwadia, Phailaung Phohomsiri. Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, Royal Society, The, 2006, 462 (2071), pp.2097 - 2117. 10.1098/rspa.2006.1662. hal-01395968 HAL Id: hal-01395968 https://hal.archives-ouvertes.fr/hal-01395968 Submitted on 13 Nov 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics 1 2 FIRDAUS E. UDWADIA AND PHAILAUNG PHOHOMSIRI 1Civil Engineering, Aerospace and Mechanical Engineering, Mathematics, and Information and Operations Management, and 2Aerospace and Mechanical Engineering, University of Southern California, Los Angeles, CA 90089, USA We present the new, general, explicit form of the equations of motion for constrained mechanical systems applicable to systems with singular mass matrices. The systems may have holonomic and/or non holonomic constraints, which may or may not satisfy D’Alembert’s principle at each instant of time. -
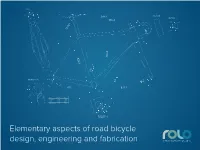
Elementary Aspects of Road Bicycle Design, Engineering
VIEW C 3 6 25 9,62 549,4 VIEW B-B SECTION - 376,4 B 16,08 5,50 8 149,7 72,82° 17,20 C B 562,4 522,9 A E E 10 5 27 150 SECTION A-A R8,20 74 46,3 R 10 9,46 32,50° 77,31° 411 574,1 A 141 147 153 brand 50teeth 53teeth Shimano 141mm 147mm 8,70 SRAM 141mm 147mm 25 Campagnolo 142mm 148mm R1,5 12 3,5° R7,6 6 5 R R 8,4 8,15 2 SECTION E-E SCALE 1 : 1 Elementary aspects of road bicycle design, engineering and fabrication © Motion Devices SA, 2015 © Motion Devices SA Page 1 Over the course of the last one hundred years, the design of the Contents diamond frame road racing bicycle has evolved surprisingly little. A quick look at frame building 2 Nonetheless, many riders complain about not feeling comfortable What has custom meant? 3 on their bicycles but do not always understand why that is the case. When is a monocoque a monocoque? 4 Few complain that their bicycles do not handle as they would wish, A quick background on carbon fiber 5 silently accepting that a new bicycle does not feel as intuitive as the Why a custom lay-up? 6 bicycles of their youth. They usually ascribe the difference to their It turns out that geometry is not as easy as it looks 7 rose colored backward looking glasses. The rule of thirds 8 Stack and reach explained 8 In fact, while correct bicycle design and engineering requires a The importance of being consistent 8 thorough understanding in order to produce a very high performing Top tube length 9 bicycle, it is not impossible to achieve. -
IN CONTROL.Indd
2 3 Dear motorcycle rider! The book you now hold in your hand is unique. freedom on your way towards unknown places. It is a gift from motorcycle riders to motorcycle We are today about 90.000 riders in Norway. riders. Motorcycle riding is first of all about the Every spring we swarm out on the roads as joy of life. The feeling of being on the road. Meet soon as the snow is gone. Eager to enjoy a new friends. Enjoy the man-machine togetherness riding season. More than 99% of us return on curvy roads. Feel the power of acceleration, happily home from adventure. But not all. the thrill of leaning into a curve. Or the calm, For motorcycle riding is a demanding sport. p u l s a t i n g sensation of A small rider error can result in serious injury. The accident could have been avoided if only small things had been done otherwise. Indeed, research shows that many a rider 2 3 ditches in situations where the bike itself could the rider’s own instinctive actions. Conscious have carried him safely through. But often the effort to learn precise riding techniques, rider disturbs the bike by inadequate action. and thus beat instinct, will inevitably lead to Faced with danger, a human being reacts increased joy and less trouble. instinctively. A lightning quick reaction intended To change working habits demands A motorcycle to avoid injury. Action that happens before perseverance. It takes humility to realize can do only we have time to think. Riding a bike, these that you may be wrong. -

2015 Training Manual
Copyright © 2015 by T revor Dech (Owner of Too Cool Motorcycle School Inc.) All rights reserved. This manual is provided to our students as a part of our Basic Motorcycle Course. Its contents are the property of Too Cool Motorcycle School Inc. and are not to be reproduced, distributed, or transmitted without permission. Publish Date: Jan 10, 2015 Version: 2.6 Training: McMahon Stadium, South East Lot Classroom: Dalhousie Community Centre Phone: 403-202-0099 Website: www.toocoolmotorcycleschool.com TABLE OF CONTENTS Too Cool Motorcycle School Training Manual TABLE OF CONTENTS PART ONE ..................................................................................1 TYPES OF MOTORCYCLES ..........................................................................1 OFF-ROAD MOTORCYCLES .................................................................................................1 TRAIL ......................................................................................................................1 ENDURO...................................................................................................................2 MOTOCROSS ............................................................................................................2 TRIALS.....................................................................................................................2 DUAL PURPOSE.........................................................................................................2 ROAD BIKES .....................................................................................................................3