Bicycle and Motorcycle Dynamics - Wikipedia, the Free Encyclopedia 16/1/22 上午 9:00
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
A Procedure for Determining Bicycle Braking Performance
NBSIR 75-953 A Procedure for Determining Bicycle Braking Performance Donald E. Marlowe Engineering Mechanics Section Mechanics Division Institute for Basic Standards National Bureau of Standards Washington, D. C. 20234 Final Report December 1975 Issued, July 1976 Prepared for Office of Consumer Product Safety Center for Consumer Product Technology Institute for Applied Technology National Bureau of Standards Washington, D. C. 20234 NBSIR 75-953 A PROCEDURE FOR DETERMINING BICYCLE BRAKING PERFORMANCE Donald E. Marlowe Engineering Mechanics Section Mechanics Division Institute for Basic Standards National Bureau of Standards Washington, D. C. 20234 Final Report December 1975 Issued, July 1976 Prepared for Office of Consumer Product Safety Center for Consumer Product Technology Institute for Applied Technology National Bureau of Standards Washington, D. C. 20234 U.S. DEPARTMENT OF COMMERCE, Elliot L. Richardson, Secretary Edward O. Vetter, Under Secretary Dr. Betsy Ancker-Johnson, Assistant Secretary for Science and Technology NATIONAL BUREAU OF STANDARDS, Ernest Ambler, Acting Director CONTENTS page 1. SCOPE 1.1 General 1 1.2 Test Samples 1 1.3 Test Flow 1 2. APPLICABLE DOCUMENTS 1 3. TEST EQUIPMENT 3 4. TEST PRECAUTIONS 3 4.1 Environment 3 4.2 Rider Safety 3 4.3 Equipment Check-out 3 5. PROCEDURES 5.1 Preliminary Checks and Measurements 5 5.2 Test Equipment Setup 5 5.2.1 Caliper Brake System 6 (a) primary system 6 (b) extension lever system 11 5.2.2 Coaster Brake System 11 5.2.3 Caliper-Coaster Brake Combinations 16 5.3 Final Checks and Adjustments 16 5.4 Compliance Test Procedure 16 5.4.1 Loading Test 16 5.4.2 Rocking Test 18 5.4.3 Performance Test 18 5.4.4 Rider Coordination 21 LIST OF FIGURES 1. -

Cycling Network Discontinuities and Their Effects on Cyclist Behaviour and Safety
UNIVERSITÉ DE MONTRÉAL CYCLING NETWORK DISCONTINUITIES AND THEIR EFFECTS ON CYCLIST BEHAVIOUR AND SAFETY MATIN ALSADAT NABAVI NIAKI DÉPARTEMENT DES GÉNIES CIVIL, GÉOLOGIQUE ET DES MINES ÉCOLE POLYTECHNIQUE DE MONTRÉAL THЀSE PRÉSENTÉE EN VUE DE L’OBTENTION DU DIPLÔME DE PHILOSOPIAE DOCTOR (GÉNIE CIVIL) AOÛT 2018 © Matin Alsadat Nabavi Niaki, 2018. UNIVERSITÉ DE MONTRÉAL ÉCOLE POLYTECHNIQUE DE MONTRÉAL Cette thèse intitulée : CYCLING NETWORK DISCONTINUITIES AND THEIR EFFECTS ON CYCLIST BEHAVIOUR AND SAFETY présentée par : NABAVI NIAKI Matin Alsadat en vue de l’obtention du diplôme de : Philosophiae Doctor a été dûment acceptée par le jury d’examen constitué de : Mme MORENCY Catherine, Ph. D., présidente M. SAUNIER Nicolas, Ph. D., membre et directeur de recherche M. MIRANDA-MORENO Luis, Ph. D., membre et codirecteur de recherche M. WAYGOOD Owen, Ph. D., membre M. MONSERE Christopher, Ph. D., membre iii ACKNOWLEDGEMENTS My work leading to the completion of this dissertation would have been insignificant without the intellectual efforts and moral support of my supervisors and friends. My deepest gratitude goes to my supervisors Dr. Nicolas Saunier, and Dr. Luis Miranda-Moreno for their patience and guidance. My persistent questions and showing up at their office were always rewarded with insightful responses and constructive feedback. I am very lucky to have worked with these remarkable researchers and mentors. Through an international doctoral exchange, I had the fortune of working with Dr. Aliaksei Laureshyn at Lund University, Sweden. The experience was inspiring and memorable. I would like to thank the Fonds de recherche du Québec - Nature et technologies (FRQNT) grant 2015-NC-180344 and the National Science and Research Council (NSERC), grant 2017-06115 for their financial support, as well as the City of Montréal and boroughs that authorized the data collection. -

Michelin: Socially Responsible Industrial Restructuring (Research Report)
Michelin: Socially Responsible Industrial Restructuring (Research Report) Professor Sandra J. Sucher and Research Associate Susan J. Winterberg* Introduction This report describes Michelin’s approach to socially responsible industrial restructuring.a The report was designed to serve two purposes—documentation and learning. The report provides documentation of Michelin’s practices in socially responsible industrial restructuring and contains an agreed upon description of Michelin’s planned, integrative, and humanistic approach. The report was also written as an opportunity for learning for Michelin’s leaders. The report traces the evolution in planning and practices that Michelin has used to conduct socially responsible restructuring over time. The resulting picture is both a view from the inside—told in the words and through the actions of Michelin’s managers—and a view from the outside—incorporating the reactions of stakeholders to Michelin’s restructuring approaches in various situations. Hopefully, it helps Michelin’s leaders assess where they have been and where they are headed in their evolving journey in socially responsible industrial restructuring. Michelin: Socially Responsible Industrial Restructuring Company Background Managing People at Michelin Industrial Restructuring at Michelin: Foundations and Evolution 2003–2013: Developing the ‘Ramp Down & Up Model’ of Restructuring 2013–Forward: Developing the New Restructuring Process Preparing the Annual Restructuring Plan Case Studies of Restructuring at Michelin Managing Stakeholders during Ramp Downs: Three Case Studies A Perfect Storm: Closing the Kleber Factory in Toul, France Closing a Truck Tire Factory in Budapest, Hungary Divestiture of a Rubber Plantation in Bahía, Brazil Managing Collaboration During Turnarounds: Two Case Studies Developing the Turnaround Option: Bourges, France A Beta-Test for Empowerment: Transforming the Roanne Factory, France Summary a Reviews Included: C. -

Tubeless-Ready Bead Tire Instructions Say Goodbye to Cold
TUBELESS-READY BEAD TIRE INSTRUCTIONS SAY GOODBYE TO COLD. SAY HELLO TO COMFORT. INTENDED USE 45North is built on real-world needs and knowledge. Our collection Studded tires: winter commuting, fatbiking and winter delivers unrivaled comfort and control through advanced technical off-road cycling. design and effective use of materials. We have more people who Fatbike tires: for bicycles that accommodate a 26 x 3.7" or larger ride more miles in colder weather than anywhere on the planet. tire, for winter off-road cycling. Enjoy. NOTE: 45North Studded tires are not intended for long-haul loaded WARNING: CYCLING CAN BE DANGEROUS. touring on pavement. BICYCLE PRODUCTS SHOULD BE INSTALLED AND SERVICED BY A PROFESSIONAL MECHANIC. NEVER MODIFY YOUR RIM COMPATIBILITY BICYCLE OR ACCESSORIES. READ AND FOLLOW ALL PRODUCT WARNING: Standard bead 45North tires are not tubeless ready. INSTRUCTIONS AND WARNINGS INCLUDING INFORMATION ON THE MANUFACTURER’S WEBSITE. INSPECT YOUR BICYCLE Tire Width Outside Rim Width BEFORE EVERY RIDE. ALWAYS WEAR A HELMET. 30mm 20–25mm WARNING: Tires are a part of your bike that will wear out with 35mm 20–25mm use. Tires may pick up foreign objects such as glass or road debris that will puncture the tire and inner tube, causing a loss of air 38mm 20–28mm pressure and reduced ability to control or stop the bike, which 54mm (2.1") 25–35mm could lead to a crash resulting in serious injury or death. Before each ride check to ensure that your tires are in good condition, 60mm (2.35") 25–40mm properly seated on the rim, and properly inflated. -

Application Note #5 Failure Analysis of a Motorcycle Suspension
Application Note #5 Failure Analysis of a Motorcycle Suspension The Summary Failed metal parts can have catastrophic consequences depending on the application. In a motor vehicle, if the part fails while the vehicle is traveling at high speeds, a horrible accident could result. Determining the mechanisms of failure, when one has occurred, can lead to improvements or to eliminate the problem. This note shows the application of a variety of microscopy techniques to examining a failed motorcycle fork. Introduction an after-market company, to change the steering geometry as part of the installation For steering a motorcycle a triple clamp of a sidecar. Installing a modified triple assembly holds the telescoping front fork clamp minimizes the cost of adding a tubes and headset bearings. These sidecar to a motorcycle. This is usually done assemblies pivot to steer the motorcycle. In to minimize the effort needed to steer the the design, the lower clamp is larger, and motorcycle when a sidecar is attached. carries much of the mechanical load from the front wheel, brakes and suspension, into For this particular situation, the lower clamp the bike's frame. was modified by cutting and welding. After a while the vehicle acquired a persistent pull to the right. The owner suspected the modified triple clamp. When the assembly was taken apart they found that the clamp had cracked around the modification of the left fork tube. The damage was so bad that the fork tubes were out of parallel. The damaged part was replaced and a catastrophic failure was averted. But what went on? In the failure analysis described in this note, this particular clamp had been modified by ©2017 Analytical Answers, Inc. -

Galvin Receptive to I Laboratory System of the Nation' Concept Proposed by DOE Lab Directors Narath Employee Dialogue Sessions Focus on Calvin Task Force Activities
Galvin receptive to I laboratory system of the nation' concept proposed by DOE lab directors Narath employee dialogue sessions focus on Calvin Task Force activities By John German the "Galvin Commission"- officially the the task force, during his Aug. 16 visit to San• - Lab News Staff Secretary of Energy Advisory Board Task Force dia. During that visit, Galvin challenged the on Alternative Futures for the DOE National 10 directors to come up with a collective Labs President AI Narath, during three Laboratories. The task force was created by vision for alternative futures for the DOE labs quarterly employee dialogue sessions at Sandia/ Energy Secretary Hazel O'Leary in February to (Lab News, Sept. 2). New Mexico last week, said he is encouraged recommend alternative missions for the 10 Science serving society by what he perceives as a renewed spirit of DOE multiprogram labs (Lab News, Feb. 18). cooperation among the directors of the 10 During the sessions, Al reported that the Al says the consensus that resulted from DOE multiprogram labs. collaborative atmosphere among the directors subsequent meetings of the directors was that The dialogue sessions, which took place resulted from the surprise challenge by Bob the DOE labs should join together to provide Oct. 4 and 5, focused on recent activities of Galvin, Chairman of Motorola and head of an integrated DOE laboratory system serving the greater needs of society - a "laboratory system of the nation." This integrated laboratory system, they propose, would have as its primary mission supporting a "sustainable future" for the nation by providing unique research and development capabilities in its core missions (energy, environment, national security, and basic sciences) and in emerging missions Vol. -

Control Theory
Control theory S. Simrock DESY, Hamburg, Germany Abstract In engineering and mathematics, control theory deals with the behaviour of dynamical systems. The desired output of a system is called the reference. When one or more output variables of a system need to follow a certain ref- erence over time, a controller manipulates the inputs to a system to obtain the desired effect on the output of the system. Rapid advances in digital system technology have radically altered the control design options. It has become routinely practicable to design very complicated digital controllers and to carry out the extensive calculations required for their design. These advances in im- plementation and design capability can be obtained at low cost because of the widespread availability of inexpensive and powerful digital processing plat- forms and high-speed analog IO devices. 1 Introduction The emphasis of this tutorial on control theory is on the design of digital controls to achieve good dy- namic response and small errors while using signals that are sampled in time and quantized in amplitude. Both transform (classical control) and state-space (modern control) methods are described and applied to illustrative examples. The transform methods emphasized are the root-locus method of Evans and fre- quency response. The state-space methods developed are the technique of pole assignment augmented by an estimator (observer) and optimal quadratic-loss control. The optimal control problems use the steady-state constant gain solution. Other topics covered are system identification and non-linear control. System identification is a general term to describe mathematical tools and algorithms that build dynamical models from measured data. -

Safety Information
125367.PDF SAFETY INFORMATION HEADSHOK SOLO w/DL50 BiCYCLE ForK SUPPLEMENT ABOUT THIS SUPPLEMENT Please consult the Cannondale Solo Bicycle Fork Owner’s Manual Supplement for care and maintenance information Cannondale Owner’s Manual Supplements provide concerning the fork and front wheel removal and installation. important model specific safety, maintenance, and technical information. They are not replacements for your Cannondale Bicycle Owner’s Manual. REAR BRAKE ROTOR This supplement may be one of several for your bike. Be sure to obtain and read all of them. WARNING If you need a manual or supplement, or have a question KeeP yoUR HanDS anD fingers CLear of THE about your bike, please contact your Cannondale Dealer BraKE rotor anD CHainCase!! immediately, or call us at one of the telephone numbers listed on the back cover of this manual. You can download Adobe Acrobat PDF versions of any CHAINCASE HUB CAP Cannondale Owner’s Manuals or Supplements from our website: http://www.cannondale.com/bikes/tech. NOTICE • This manual is not a comprehensive safety or service DO not RIDE THIS BIKE WITH THE CHAINCASE HUB manual for your bike. CAP remoVED. Serious damage to the hub will result. See page 13. • This manual does not include assembly instructions for your bike. • All Cannondale bikes must be completely assembled and inspected for proper operation by a Cannondale Dealer before delivery to the owner. BICYCLE REPAIR / WORK STANDS The clamping jaws of a bike stand can generate a crushing WARNING force strong enough to seriously damage your frame. This supplement may include procedures beyond the NOTICE scope of general mechanical aptitude. -
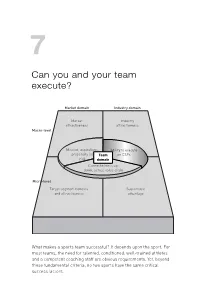
Can You and Your Team Execute?
Chapter7.qxd 28/4/06 2:10 pm Page 147 7 Can you and your team execute? Market domain Industry domain Market Industry attractiveness attractiveness Macro-level Mission, aspirations, AbilityAbility to to execute execute propensity for Team onon CSFs CSFs risk domain Connectedness up, down, across value chain Micro-level Target segment benefits Sustainable and attractiveness advantage What makes a sports team successful? It depends upon the sport. For most teams, the need for talented, conditioned, well-trained athletes and a competent coaching staff are obvious requirements. Yet, beyond these fundamental criteria, no two sports have the same critical success factors. Chapter7.qxd 28/4/06 2:10 pm Page 148 Take for example basketball, football and polo. Successful basketball teams must have players with the hand-eye coordination to shoot the ball accurately. Having tall players doesn’t hurt, either, of course. On the other hand, football (soccer) is played largely with the feet, so hand–eye coordination doesn’t matter very much. Agility and an ability to control the ball while keeping one’s head and eyes up are critical, however. A polo team’s success depends on both the athletes and the horses. As in basketball and football, the athletes need to have a good shot, but they must also be able to make this shot while riding a horse at high speed. In all three sports, endurance also matters – the fittest team often wins. In each of these sports, different factors are critical to success. Height and shooting ability make a big difference in basketball. Foot skills and the ability to maintain possession of the ball are important in football. -
ECR 29 Fork Instructions Compatibility Intended Use Safety
RETAILER: These fork instructions MUST BE provided to the end user. ECR 29 Fork Instructions Hi there. Thanks for spending your hard-earned cash on this Surly fork. Surly stuff is designed to be useful and durable. We’re confident it will serve you well for years to come. WARNING: Cycling can be dangerous. Bicycle products should be installed and serviced by a professional mechanic. Never modify your bicycle or accessories. Read and follow all product instructions and warnings including information on the manufacturer’s website. Inspect your bicycle before every ride. Always wear a helmet. Additional Product and Safety Information can be found at the website: surlybikes.com/safety Compatibility Steerer: EC34/28.6 upper, Hub spacing/Hub dish: 100mm EC34/30 lower Tire clearance: 29 x 2.5˝ or 27.5 x 3.0˝, Steerer length: 260mm individual tire and rim combos affect tire clearance Axle-to-crown: 468mm Brakes: Disc Offset: 47mm Intended Use ASTM F2043 CONDITION 3 This is a set of conditions for the operation of a bicycle that includes Condition 1 and Condition 2 as well as rough trails, rough unpaved roads and rough terrain and unimproved trails that require technical skills. Jumps and Drops are intended to be less than 61cm (24˝). Please see link to Bike Owner’s Manual on surlybikes.com/safety for complete list of riding Jumps and drops are intended to be less than condition descriptions. 3 61cm (24″) Safety WARNING: FAILURE TO READ AND FOLLOW ANY OF THESE SAFETY WARNINGS COULD CAUSE A CRASH AND SERIOUS INJURY • Do not rest the fork dropouts on the floor or other hard surface; doing so can damage the fork, making it unsafe or dangerous to ride • This fork is only compatible with quick release fenders. -

The Paterek Manual
THE PATEREK MANUAL For Bicycle Framebuilders SUPPLEMEN TED VERSION Written by: Tim Paterek Photography by: Kelly Shields, Jens Gunelson, and Tim Paterek Illustrated by: Tim Paterek Photolabwork by: Jens Gunelson Published by: Kermesse Distributors Inc. 464 Central Avenue Unit #2, Horsham, PA 19044 216-672-0230 ACKNOWLEDGEMENTS This book would not have been possible without help from the following people: Terry Osell Chris Kvale Roy Simonson Cecil Behringer Kelly Shields Jens Gunelson Dr. Josephine Paterek John Corbett Ginny Szalai Steve Flagg Special thanks must also go to: Dr. Hank Thomas Dr. James Collier Dr. Joseph Hesse John Temple Ron Storm Paul Speidel Laura Orbach Marty Erickson Mary Rankin Terry Doble Todd Moldenhauer Jay Arneson Susan Burch Harvey Probst Alan Cambronne Laurel Hedeen Martha Kennedy Bill Farrell Bill Lofgren Andy Bear The following companies were particularly help ful during the writing of this book: T.I. Sturmey-Archer of America Phil Wood Bicycle Research Binks Blackburn Design Dynabrade Handy Harmon Henry James New England Cycling Academy Strawberry Island Cycle Supply Ten Speed Drive Primo Consorizio G.P. Wilson Quality Bicycle Products Zeus Cyclery True Temper Cycle Products East side Quick Print Shimano Sales Corp. Santana Cycles Modern Machine and Engineering 3M AUTHORS FOREWORD There are many types of bicycle framebuilders and they can be easily categorized in the following way: 1. They offer custom geometrical specifications for each individual customer. 2. They offer any frame components the customer requests. i.e. tubing, lugs, dropouts, crown, shell, etc. 3. They offer custom finishing with a wide range of color choices. 4. They also offer the customer the option of building up a complete bike with any gruppo the customer wants. -

Building a Motorized Drift Trike Hayden Pegley
Building a Motorized Drift Trike Hayden Pegley ASR - F Block - 5/17/2017 Abstract: The goal of this project was to create an affordable motorized drift trike using a hand-welded steel frame, the front half of a used mountain bike, and a 6.5 hp, 212 cc Predator gas engine. The back frame of the trike was welded over the course of several weeks, and components including the axle, front wheel, and throttle system were added after the frame’s completion. While the trike is not fully operational, the throttle system is functional and the trike is near completion. Introduction, Motivation, and History During my freshman year, while conducting an experiment in the Whitaker Lab, I stumbled upon a go kart that an ASR student had recently completed. I was fascinated by the idea of making an operational automobile during high school. I promised myself then and there that I would take ASR and make a go kart of my own for my second semester project. However, as I began the initial research stages for my project and read previous students’ papers, it became clear that making a go kart would not be an original idea. I determined the two aspects of a go kart that made it appealing to me, those being that is was fun and motorized, and continued my search for an alternative project. It was on a go kart parts website that the phrase “drift trike” first popped up. After watching videos of people bombing hills on motorless drift trikes, I was led to multiple instructional videos on how to outfit a drift trike with a gas engine for flatland use [1].