Paleo-“Stress” Analysis from Fault Data
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Faults and Joints
133 JOINTS Joints (also termed extensional fractures) are planes of separation on which no or undetectable shear displacement has taken place. The two walls of the resulting tiny opening typically remain in tight (matching) contact. Joints may result from regional tectonics (i.e. the compressive stresses in front of a mountain belt), folding (due to curvature of bedding), faulting, or internal stress release during uplift or cooling. They often form under high fluid pressure (i.e. low effective stress), perpendicular to the smallest principal stress. The aperture of a joint is the space between its two walls measured perpendicularly to the mean plane. Apertures can be open (resulting in permeability enhancement) or occluded by mineral cement (resulting in permeability reduction). A joint with a large aperture (> few mm) is a fissure. The mechanical layer thickness of the deforming rock controls joint growth. If present in sufficient number, open joints may provide adequate porosity and permeability such that an otherwise impermeable rock may become a productive fractured reservoir. In quarrying, the largest block size depends on joint frequency; abundant fractures are desirable for quarrying crushed rock and gravel. Joint sets and systems Joints are ubiquitous features of rock exposures and often form families of straight to curviplanar fractures typically perpendicular to the layer boundaries in sedimentary rocks. A set is a group of joints with similar orientation and morphology. Several sets usually occur at the same place with no apparent interaction, giving exposures a blocky or fragmented appearance. Two or more sets of joints present together in an exposure compose a joint system. -
Describe the Geometry of a Fault (1) Orientation of the Plane (Strike and Dip) (2) Slip Vector
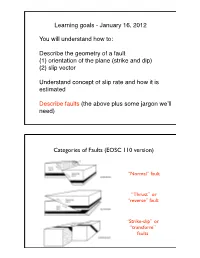
Learning goals - January 16, 2012 You will understand how to: Describe the geometry of a fault (1) orientation of the plane (strike and dip) (2) slip vector Understand concept of slip rate and how it is estimated Describe faults (the above plus some jargon weʼll need) Categories of Faults (EOSC 110 version) “Normal” fault “Thrust” or “reverse” fault “Strike-slip” or “transform” faults Two kinds of strike-slip faults Right-lateral Left-lateral (dextral) (sinistral) Stand with your feet on either side of the fault. Which side comes toward you when the fault slips? Another way to tell: stand on one side of the fault looking toward it. Which way does the block on the other side move? Right-lateral Left-lateral (dextral) (sinistral) 1992 M 7.4 Landers, California Earthquake rupture (SCEC) Describing the fault geometry: fault plane orientation How do you usually describe a plane (with lines)? In geology, we choose these two lines to be: • strike • dip strike dip • strike is the azimuth of the line where the fault plane intersects the horizontal plane. Measured clockwise from N. • dip is the angle with respect to the horizontal of the line of steepest descent (perpendic. to strike) (a ball would roll down it). strike “60°” dip “30° (to the SE)” Profile view, as often shown on block diagrams strike 30° “hanging wall” “footwall” 0° N Map view Profile view 90° W E 270° S 180° Strike? Dip? 45° 45° Map view Profile view Strike? Dip? 0° 135° Indicating direction of slip quantitatively: the slip vector footwall • let’s define the slip direction (vector) -

The Role of Pressure Solution Seam and Joint Assemblages In
THE ROLE OF PRESSURE SOLUTION SEAM AND JOINT ASSEMBLAGES IN THE FORMATION OF STRIKE-SLIP AND THRUST FAULTS IN A COMPRESSIVE TECTONIC SETTING; THE VARISCAN OF SOUTHWESTERN IRELAND Filippo Nenna and Atilla Aydin Department of Geological and Environmental Sciences, Stanford University, Stanford, CA 94305 e-mail: [email protected] scale such as strike-slip faults and thrust-cored folds in Abstract various stages of their development. In this study we focus on the initiation and development of strike-slip The Ross Sandstone in County Clare, Ireland, was faults by shearing of the initial JVs and PSSs and deformed by an approximately north-south compression formation of thrust faults by exploiting weak shale during the end-Carboniferous Variscan orogeny. horizons and the strike-parallel PSSs in the adjacent Orthogonal sets of fundamental structures form the sandstone intervals. initial assemblage; mutually abutting arrays of 170˚ Development of faults from shearing of initial oriented set 1 joints/veins (JVs) and approximately 75˚ fundamental structural elements with either opening or pressure solution seams (PSSs) that formed under the closing modes in a wide range of structural settings has same stress conditions. Orientations of set 2 (splay) JVs been extensively reported. Segall and Pollard (1983), and PSSs suggest a clockwise remote stress rotation of Martel and Pollard (1989) and Martel (1990) have about 35˚ responsible for the contemporaneous described strike-slip faults formed by shearing of shearing of the set 1 arrays. Prominent strike-slip faults thermal fractures in granitic rocks. Myers and Aydin are sub-parallel to set 1 JVs and form by the linkage of (2004) and Flodin and Aydin (2004) reported strike-slip en-echelon segments with broad damage zones faulting formed by shearing of joints formed by an responsible for strike-slip offsets of hundreds of metres. -

Horst Inversion Within a Décollement Zone During Extension Upper Rhine Graben, France Joachim Place, M Diraison, Yves Géraud, Hemin Koyi
Horst Inversion Within a Décollement Zone During Extension Upper Rhine Graben, France Joachim Place, M Diraison, Yves Géraud, Hemin Koyi To cite this version: Joachim Place, M Diraison, Yves Géraud, Hemin Koyi. Horst Inversion Within a Décollement Zone During Extension Upper Rhine Graben, France. Atlas of Structural Geological Interpretation from Seismic Images, 2018. hal-02959693 HAL Id: hal-02959693 https://hal.archives-ouvertes.fr/hal-02959693 Submitted on 7 Oct 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Horst Inversion Within a Décollement Zone During Extension Upper Rhine Graben, France Joachim Place*1, M. Diraison2, Y. Géraud3, and Hemin A. Koyi4 1 Formerly at Department of Earth Sciences, Uppsala University, Sweden 2 Institut de Physique du Globe de Strasbourg (IPGS), Université de Strasbourg/EOST, Strasbourg, France 3 Université de Lorraine, Vandoeuvre-lès-Nancy, France 4 Department of Earth Sciences, Uppsala University, Sweden * [email protected] The Merkwiller–Pechelbronn oil field of the Upper Rhine Graben has been a target for hydrocarbon exploration for over a century. The occurrence of the hydrocarbons is thought to be related to the noticeably high geothermal gradient of the area. -

Mercian 11 B Hunter.Indd
The Cressbrook Dale Lava and Litton Tuff, between Longstone and Hucklow Edges, Derbyshire John Hunter and Richard Shaw Abstract: With only a small exposure near the head of its eponymous dale, the Cressbrook Dale Lava is the least exposed of the major lava flows interbedded within the Carboniferous platform- carbonate succession of the Derbyshire Peak District. It underlies a large area of the limestone plateau between Longstone Edge and the Eyam and Hucklow edges. The recent closure of all of the quarries and underground mines in this area provided a stimulus to locate and compile the existing subsurface information relating to the lava-field and, supplemented by airborne geophysical survey results, to use these data to interpret the buried volcanic landscape. The same sub-surface data-set is used to interpret the spatial distribution of the overlying Litton Tuff. Within the regional north-south crustal extension that survey indicate that the outcrops of igneous rocks in affected central and northern Britain on the north side the White Peak are only part of a much larger volcanic of the Wales-Brabant High during the early part of the field, most of which is concealed at depth beneath Carboniferous, a province of subsiding platforms, tilt- Millstone Grit and Coal Measures farther east. Because blocks and half-grabens developed beneath a shallow no large volcano structures have been discovered so continental sea. Intra-plate magmatism accompanied far, geological literature describes the lavas in the the lithospheric thinning, with basic igneous rocks White Peak as probably originating from four separate erupting at different times from a number of small, local centres, each being active in a different area at different volcanic centres scattered across a region extending times (Smith et al., 2005). -

THE GROWTH of SHEEP MOUNTAIN ANTICLINE: COMPARISON of FIELD DATA and NUMERICAL MODELS Nicolas Bellahsen and Patricia E
THE GROWTH OF SHEEP MOUNTAIN ANTICLINE: COMPARISON OF FIELD DATA AND NUMERICAL MODELS Nicolas Bellahsen and Patricia E. Fiore Department of Geological and Environmental Sciences, Stanford University, Stanford, CA 94305 e-mail: [email protected] be explained by this deformed basement cover interface Abstract and does not require that the underlying fault to be listric. In his kinematic model of a basement involved We study the vertical, compression parallel joint compressive structure, Narr (1994) assumes that the set that formed at Sheep Mountain Anticline during the basement can undergo significant deformations. Casas early Laramide orogeny, prior to the associated folding et al. (2003), in their analysis of field data, show that a event. Field data indicate that this joint set has a basement thrust sheet can undergo a significant heterogeneous distribution over the fold. It is much less penetrative deformation, as it passes over a flat-ramp numerous in the forelimb than in the hinge and geometry (fault-bend fold). Bump (2003) also discussed backlimb, and in fact is absent in many of the forelimb how, in several cases, the basement rocks must be field measurement sites. Using 3D elastic numerical deformed by the fault-propagation fold process. models, we show that early slip along an underlying It is noteworthy that basement deformation often is thrust fault would have locally perturbed the neglected in kinematic (Erslev, 1991; McConnell, surrounding stress field, inducing a compression that 1994), analogue (Sanford, 1959; Friedman et al., 1980), would inhibit joint formation above the fault tip. and numerical models. This can be attributed partially Relating the absence of joints in the forelimb to this to the fact that an understanding of how internal stress perturbation, we are able to constrain the deformation is delocalized in the basement is lacking. -

Basin Inversion and Structural Architecture As Constraints on Fluid Flow and Pb-Zn Mineralisation in the Paleo-Mesoproterozoic S
https://doi.org/10.5194/se-2020-31 Preprint. Discussion started: 6 April 2020 c Author(s) 2020. CC BY 4.0 License. 1 Basin inversion and structural architecture as constraints on fluid 2 flow and Pb-Zn mineralisation in the Paleo-Mesoproterozoic 3 sedimentary sequences of northern Australia 4 5 George M. Gibson, Research School of Earth Sciences, Australian National University, Canberra ACT 6 2601, Australia 7 Sally Edwards, Geological Survey of Queensland, Department of Natural Resources, Mines and Energy, 8 Brisbane, Queensland 4000, Australia 9 Abstract 10 As host to several world-class sediment-hosted Pb-Zn deposits and unknown quantities of conventional and 11 unconventional gas, the variably inverted 1730-1640 Ma Calvert and 1640-1580 Ma Isa superbasins of 12 northern Australia have been the subject of numerous seismic reflection studies with a view to better 13 understanding basin architecture and fluid migration pathways. Strikingly similar structural architecture 14 has been reported from much younger inverted sedimentary basins considered prospective for oil and gas 15 elsewhere in the world. Such similarities suggest that the mineral and petroleum systems in Paleo- 16 Mesoproterozoic northern Australia may have spatially and temporally overlapped consistent with the 17 observation that basinal sequences hosting Pb-Zn mineralisation in northern Australia are bituminous or 18 abnormally enriched in hydrocarbons. This points to the possibility of a common tectonic driver and shared 19 fluid pathways. Sediment-hosted Pb-Zn mineralisation coeval with basin inversion first occurred during the 20 1650-1640 Ma Riversleigh Tectonic Event towards the close of the Calvert Superbasin with further pulses 21 accompanying the 1620-1580 Ma Isa Orogeny which brought about closure of the Isa Superbasin. -

Tectonic Inversion and Petroleum System Implications in the Rifts Of
Tectonic Inversion and Petroleum System Implications in the Rifts of Central Africa Marian Jenner Warren Jenner GeoConsulting, Suite 208, 1235 17th Ave SW, Calgary, Alberta, Canada, T2T 0C2 [email protected] Summary The rift system of western and central Africa (Fig. 1) provides an opportunity to explore a spectrum of relationships between initial tectonic extension and later compressional inversion. Several seismic interpretation examples provide excellent illustrations of the use of basic geometric principles to distinguish even slight inversion from original extensional “rollover” anticlines. Other examples illustrate how geometries traditionally interpreted as positive “flower” structures in areas of known transpression/ strike slip are revealed as inversion structures when examined critically. The examples also highlight the degree of compressional inversion as a function in part of the orientation of compressional stress with respect to original rift structures. Finally, much of the rift system contains recent or current hydrocarbon exploration and production, providing insights into the implications of inversion for hydrocarbon risk and prospectivity. Figure 1: Mesozoic-Tertiary rift systems of central and western Africa. Individual basins referred to in text: T-LC = Termit/ Lake Chad; LB = Logone Birni; BN = Benue Trough; BG = Bongor; DB = Doba; DS = Doseo; SL = Salamat; MG = Muglad; ML = Melut. CASZ = Central African Shear Zone (bold solid line). Bold dashed lines = inferred subsidiary shear zones. Red stars = Approximate locations of example sections shown in Figs. 2-5. Modified after Genik 1993 and Manga et al. 2001. Inversion setting and examples The Mesozoic-Tertiary rift system in Africa was developed primarily in the Early Cretaceous, during south Atlantic opening and regional NE-SW extension. -

Ductile Deformation - Concepts of Finite Strain
327 Ductile deformation - Concepts of finite strain Deformation includes any process that results in a change in shape, size or location of a body. A solid body subjected to external forces tends to move or change its displacement. These displacements can involve four distinct component patterns: - 1) A body is forced to change its position; it undergoes translation. - 2) A body is forced to change its orientation; it undergoes rotation. - 3) A body is forced to change size; it undergoes dilation. - 4) A body is forced to change shape; it undergoes distortion. These movement components are often described in terms of slip or flow. The distinction is scale- dependent, slip describing movement on a discrete plane, whereas flow is a penetrative movement that involves the whole of the rock. The four basic movements may be combined. - During rigid body deformation, rocks are translated and/or rotated but the original size and shape are preserved. - If instead of moving, the body absorbs some or all the forces, it becomes stressed. The forces then cause particle displacement within the body so that the body changes its shape and/or size; it becomes deformed. Deformation describes the complete transformation from the initial to the final geometry and location of a body. Deformation produces discontinuities in brittle rocks. In ductile rocks, deformation is macroscopically continuous, distributed within the mass of the rock. Instead, brittle deformation essentially involves relative movements between undeformed (but displaced) blocks. Finite strain jpb, 2019 328 Strain describes the non-rigid body deformation, i.e. the amount of movement caused by stresses between parts of a body. -

Collision Orogeny
Downloaded from http://sp.lyellcollection.org/ by guest on October 6, 2021 PROCESSES OF COLLISION OROGENY Downloaded from http://sp.lyellcollection.org/ by guest on October 6, 2021 Downloaded from http://sp.lyellcollection.org/ by guest on October 6, 2021 Shortening of continental lithosphere: the neotectonics of Eastern Anatolia a young collision zone J.F. Dewey, M.R. Hempton, W.S.F. Kidd, F. Saroglu & A.M.C. ~eng6r SUMMARY: We use the tectonics of Eastern Anatolia to exemplify many of the different aspects of collision tectonics, namely the formation of plateaux, thrust belts, foreland flexures, widespread foreland/hinterland deformation zones and orogenic collapse/distension zones. Eastern Anatolia is a 2 km high plateau bounded to the S by the southward-verging Bitlis Thrust Zone and to the N by the Pontide/Minor Caucasus Zone. It has developed as the surface expression of a zone of progressively thickening crust beginning about 12 Ma in the medial Miocene and has resulted from the squeezing and shortening of Eastern Anatolia between the Arabian and European Plates following the Serravallian demise of the last oceanic or quasi- oceanic tract between Arabia and Eurasia. Thickening of the crust to about 52 km has been accompanied by major strike-slip faulting on the rightqateral N Anatolian Transform Fault (NATF) and the left-lateral E Anatolian Transform Fault (EATF) which approximately bound an Anatolian Wedge that is being driven westwards to override the oceanic lithosphere of the Mediterranean along subduction zones from Cephalonia to Crete, and Rhodes to Cyprus. This neotectonic regime began about 12 Ma in Late Serravallian times with uplift from wide- spread littoral/neritic marine conditions to open seasonal wooded savanna with coiluvial, fluvial and limnic environments, and the deposition of the thick Tortonian Kythrean Flysch in the Eastern Mediterranean. -

Raplee Ridge Monocline and Thrust Fault Imaged Using Inverse Boundary Element Modeling and ALSM Data
Journal of Structural Geology 32 (2010) 45–58 Contents lists available at ScienceDirect Journal of Structural Geology journal homepage: www.elsevier.com/locate/jsg Structural geometry of Raplee Ridge monocline and thrust fault imaged using inverse Boundary Element Modeling and ALSM data G.E. Hilley*, I. Mynatt, D.D. Pollard Department of Geological and Environmental Sciences, Stanford University, Stanford, CA 94305-2115, USA article info abstract Article history: We model the Raplee Ridge monocline in southwest Utah, where Airborne Laser Swath Mapping (ALSM) Received 16 September 2008 topographic data define the geometry of exposed marker layers within this fold. The spatial extent of five Received in revised form surfaces were mapped using the ALSM data, elevations were extracted from the topography, and points 30 April 2009 on these surfaces were used to infer the underlying fault geometry and remote strain conditions. First, Accepted 29 June 2009 we compare elevations extracted from the ALSM data to the publicly available National Elevation Dataset Available online 8 July 2009 10-m DEM (Digital Elevation Model; NED-10) and 30-m DEM (NED-30). While the spatial resolution of the NED datasets was too coarse to locate the surfaces accurately, the elevations extracted at points Keywords: w Monocline spaced 50 m apart from each mapped surface yield similar values to the ALSM data. Next, we used Boundary element model a Boundary Element Model (BEM) to infer the geometry of the underlying fault and the remote strain Airborne laser swath mapping tensor that is most consistent with the deformation recorded by strata exposed within the fold. -

Stress Fields Around Dislocations the Crystal Lattice in the Vicinity of a Dislocation Is Distorted (Or Strained)
Stress Fields Around Dislocations The crystal lattice in the vicinity of a dislocation is distorted (or strained). The stresses that accompanied the strains can be calculated by elasticity theory beginning from a radial distance about 5b, or ~ 15 Å from the axis of the dislocation. The dislocation core is universally ignored in calculating the consequences of the stresses around dislocations. The stress field around a dislocation is responsible for several important interactions with the environment. These include: 1. An applied shear stress on the slip plane exerts a force on the dislocation line, which responds by moving or changing shape. 2. Interaction of the stress fields of dislocations in close proximity to one another results in forces on both which are either repulsive or attractive. 3. Edge dislocations attract and collect interstitial impurity atoms dispersed in the lattice. This phenomenon is especially important for carbon in iron alloys. Screw Dislocation Assume that the material is an elastic continuous and a perfect crystal of cylindrical shape of length L and radius r. Now, introduce a screw dislocation along AB. The Burger’s vector is parallel to the dislocation line ζ . Now let us, unwrap the surface of the cylinder into the plane of the paper b A 2πr GL b γ = = tanθ 2πr G bG τ = Gγ = B 2πr 2 Then, the strain energy per unit volume is: τ× γ b G Strain energy = = 2π 82r 2 We have identified the strain at any point with cylindrical coordinates (r,θ,z) τ τZθ θZ B r B θ r θ Slip plane z Slip plane A z G A b G τ=G γ = The elastic energy associated with an element is its θZ 2πr energy per unit volume times its volume.