Tangent and Supporting Lines, Envelopes, and Dual Curves Steven J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Combination of Cubic and Quartic Plane Curve
IOSR Journal of Mathematics (IOSR-JM) e-ISSN: 2278-5728,p-ISSN: 2319-765X, Volume 6, Issue 2 (Mar. - Apr. 2013), PP 43-53 www.iosrjournals.org Combination of Cubic and Quartic Plane Curve C.Dayanithi Research Scholar, Cmj University, Megalaya Abstract The set of complex eigenvalues of unistochastic matrices of order three forms a deltoid. A cross-section of the set of unistochastic matrices of order three forms a deltoid. The set of possible traces of unitary matrices belonging to the group SU(3) forms a deltoid. The intersection of two deltoids parametrizes a family of Complex Hadamard matrices of order six. The set of all Simson lines of given triangle, form an envelope in the shape of a deltoid. This is known as the Steiner deltoid or Steiner's hypocycloid after Jakob Steiner who described the shape and symmetry of the curve in 1856. The envelope of the area bisectors of a triangle is a deltoid (in the broader sense defined above) with vertices at the midpoints of the medians. The sides of the deltoid are arcs of hyperbolas that are asymptotic to the triangle's sides. I. Introduction Various combinations of coefficients in the above equation give rise to various important families of curves as listed below. 1. Bicorn curve 2. Klein quartic 3. Bullet-nose curve 4. Lemniscate of Bernoulli 5. Cartesian oval 6. Lemniscate of Gerono 7. Cassini oval 8. Lüroth quartic 9. Deltoid curve 10. Spiric section 11. Hippopede 12. Toric section 13. Kampyle of Eudoxus 14. Trott curve II. Bicorn curve In geometry, the bicorn, also known as a cocked hat curve due to its resemblance to a bicorne, is a rational quartic curve defined by the equation It has two cusps and is symmetric about the y-axis. -

The Dual Theorem Relative to the Simson's Line
THE DUAL THEOREM RELATIVE TO THE SIMSON’S LINE Prof. Ion Pătrașcu Frații Buzești College, Craiova, Romania Translated by Prof. Florentin Smarandache University of New Mexico, Gallup, NM 87301, USA Abstract In this article we elementarily prove some theorems on the poles and polars theory, we present the transformation using duality and we apply this transformation to obtain the dual theorem relative to the Samson’s line. I. POLE AND POLAR IN RAPPORT TO A CIRCLE Definition 1. Considering the circle COR(,), the point P in its plane PO≠ and uuur uuuur the point P ' such that OP⋅= OP' R2 . It is said about the perpendicular p constructed in the point P ' on the line OP that it is the point’s P polar, and about the point P that it is the line’s p pole. Observations M 1. If the point P belongs to the circle, its polar is the tangent in P to the circle U COR(,). uuur uuuur P' Indeed, the relation OP⋅= OP' R2 gives that PP' = . OP 2. If P is interior to the circle, its polar p is a V line exterior to the circle. 3. If P and Q are two points such that p m(POQ )= 90o , and p,q are their polars, from the definition results that p ⊥ q . Fig. 1 Proposition 1. If the point P is external to the circle COR( , ) , its polar is determined by the contact points with the circle of the tangents constructed from P to the circle Proof Let U and V be the contact points of the tangents constructed from P to the circle COR( , ) (see fig.1). -

Strophoids, a Family of Cubic Curves with Remarkable Properties
Hellmuth STACHEL STROPHOIDS, A FAMILY OF CUBIC CURVES WITH REMARKABLE PROPERTIES Abstract: Strophoids are circular cubic curves which have a node with orthogonal tangents. These rational curves are characterized by a series or properties, and they show up as locus of points at various geometric problems in the Euclidean plane: Strophoids are pedal curves of parabolas if the corresponding pole lies on the parabola’s directrix, and they are inverse to equilateral hyperbolas. Strophoids are focal curves of particular pencils of conics. Moreover, the locus of points where tangents through a given point contact the conics of a confocal family is a strophoid. In descriptive geometry, strophoids appear as perspective views of particular curves of intersection, e.g., of Viviani’s curve. Bricard’s flexible octahedra of type 3 admit two flat poses; and here, after fixing two opposite vertices, strophoids are the locus for the four remaining vertices. In plane kinematics they are the circle-point curves, i.e., the locus of points whose trajectories have instantaneously a stationary curvature. Moreover, they are projections of the spherical and hyperbolic analogues. For any given triangle ABC, the equicevian cubics are strophoids, i.e., the locus of points for which two of the three cevians have the same lengths. On each strophoid there is a symmetric relation of points, so-called ‘associated’ points, with a series of properties: The lines connecting associated points P and P’ are tangent of the negative pedal curve. Tangents at associated points intersect at a point which again lies on the cubic. For all pairs (P, P’) of associated points, the midpoints lie on a line through the node N. -

Geometry of Algebraic Curves
Geometry of Algebraic Curves Fall 2011 Course taught by Joe Harris Notes by Atanas Atanasov One Oxford Street, Cambridge, MA 02138 E-mail address: [email protected] Contents Lecture 1. September 2, 2011 6 Lecture 2. September 7, 2011 10 2.1. Riemann surfaces associated to a polynomial 10 2.2. The degree of KX and Riemann-Hurwitz 13 2.3. Maps into projective space 15 2.4. An amusing fact 16 Lecture 3. September 9, 2011 17 3.1. Embedding Riemann surfaces in projective space 17 3.2. Geometric Riemann-Roch 17 3.3. Adjunction 18 Lecture 4. September 12, 2011 21 4.1. A change of viewpoint 21 4.2. The Brill-Noether problem 21 Lecture 5. September 16, 2011 25 5.1. Remark on a homework problem 25 5.2. Abel's Theorem 25 5.3. Examples and applications 27 Lecture 6. September 21, 2011 30 6.1. The canonical divisor on a smooth plane curve 30 6.2. More general divisors on smooth plane curves 31 6.3. The canonical divisor on a nodal plane curve 32 6.4. More general divisors on nodal plane curves 33 Lecture 7. September 23, 2011 35 7.1. More on divisors 35 7.2. Riemann-Roch, finally 36 7.3. Fun applications 37 7.4. Sheaf cohomology 37 Lecture 8. September 28, 2011 40 8.1. Examples of low genus 40 8.2. Hyperelliptic curves 40 8.3. Low genus examples 42 Lecture 9. September 30, 2011 44 9.1. Automorphisms of genus 0 an 1 curves 44 9.2. -

9.-PARABOLA-THEORY.Pdf
10. PARABOLA 1. INTRODUCTION TO CONIC SECTIONS 1.1 Geometrical Interpretation Conic section, or conic is the locus of a point which moves in a plane such that its distance from a fixed point is in a constant ratio to its perpendicular distance from a fixed straight line. (a) The fixed point is called the Focus. (b) The fixed straight line is called the Directrix. (c) The constant ratio is called the Eccentricity denoted by e. (d) The line passing through the focus and perpendicular to the directrix is called the Axis. (e) The point of intersection of a conic with its axis is called the Vertex. Sections on right circular cone by different planes (a) Section of a right circular cone by a plane passing through its vertex is a pair of straight lines passing through the vertex as shown in the figure. (b) Section of a right circular cone by a plane parallel to its base is a circle. (c) Section of a right circular cone by a plane parallel to a generator of the cone is a parabola. (d) Section of a right circular cone by a plane neither parallel to a side of the cone nor perpendicular to the axis of the cone is an ellipse. (e) Section of a right circular cone by a plane parallel to the axis of the cone is an ellipse or a hyperbola. 3D View: Circle Ellipse Parabola Hyperbola Figure 10.1 1.2 Conic Section as a Locus of a Point If a point moves in a plane such that its distances from a fixed point and from a fixed line always bear a constant ratio 'e' then the locus of the point is a conic section of the eccentricity e (focus-directrix property). -

A Special Conic Associated with the Reuleaux Negative Pedal Curve
INTERNATIONAL JOURNAL OF GEOMETRY Vol. 10 (2021), No. 2, 33–49 A SPECIAL CONIC ASSOCIATED WITH THE REULEAUX NEGATIVE PEDAL CURVE LILIANA GABRIELA GHEORGHE and DAN REZNIK Abstract. The Negative Pedal Curve of the Reuleaux Triangle w.r. to a pedal point M located on its boundary consists of two elliptic arcs and a point P0. Intriguingly, the conic passing through the four arc endpoints and by P0 has one focus at M. We provide a synthetic proof for this fact using Poncelet’s porism, polar duality and inversive techniques. Additional interesting properties of the Reuleaux negative pedal w.r. to pedal point M are also included. 1. Introduction Figure 1. The sides of the Reuleaux Triangle R are three circular arcs of circles centered at each Reuleaux vertex Vi; i = 1; 2; 3. of an equilateral triangle. The Reuleaux triangle R is the convex curve formed by the arcs of three circles of equal radii r centered on the vertices V1;V2;V3 of an equilateral triangle and that mutually intercepts in these vertices; see Figure1. This triangle is mostly known due to its constant width property [4]. Keywords and phrases: conic, inversion, pole, polar, dual curve, negative pedal curve. (2020)Mathematics Subject Classification: 51M04,51M15, 51A05. Received: 19.08.2020. In revised form: 26.01.2021. Accepted: 08.10.2020 34 Liliana Gabriela Gheorghe and Dan Reznik Figure 2. The negative pedal curve N of the Reuleaux Triangle R w.r. to a point M on its boundary consist on an point P0 (the antipedal of M through V3) and two elliptic arcs A1A2 and B1B2 (green and blue). -

A Survey of the Development of Geometry up to 1870
A Survey of the Development of Geometry up to 1870∗ Eldar Straume Department of mathematical sciences Norwegian University of Science and Technology (NTNU) N-9471 Trondheim, Norway September 4, 2014 Abstract This is an expository treatise on the development of the classical ge- ometries, starting from the origins of Euclidean geometry a few centuries BC up to around 1870. At this time classical differential geometry came to an end, and the Riemannian geometric approach started to be developed. Moreover, the discovery of non-Euclidean geometry, about 40 years earlier, had just been demonstrated to be a ”true” geometry on the same footing as Euclidean geometry. These were radically new ideas, but henceforth the importance of the topic became gradually realized. As a consequence, the conventional attitude to the basic geometric questions, including the possible geometric structure of the physical space, was challenged, and foundational problems became an important issue during the following decades. Such a basic understanding of the status of geometry around 1870 enables one to study the geometric works of Sophus Lie and Felix Klein at the beginning of their career in the appropriate historical perspective. arXiv:1409.1140v1 [math.HO] 3 Sep 2014 Contents 1 Euclideangeometry,thesourceofallgeometries 3 1.1 Earlygeometryandtheroleoftherealnumbers . 4 1.1.1 Geometric algebra, constructivism, and the real numbers 7 1.1.2 Thedownfalloftheancientgeometry . 8 ∗This monograph was written up in 2008-2009, as a preparation to the further study of the early geometrical works of Sophus Lie and Felix Klein at the beginning of their career around 1870. The author apologizes for possible historiographic shortcomings, errors, and perhaps lack of updated information on certain topics from the history of mathematics. -
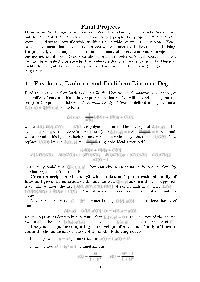
Final Projects 1 Envelopes, Evolutes, and Euclidean Distance Degree
Final Projects Directions: Work together in groups of 1-5 on the following four projects. We suggest, but do not insist, that you work in a group of > 1 people. For projects 1,2, and 3, your group should write a text le with (working!) code which answers the questions. Please provide documentation for your code so that we can understand what the code is doing. For project 4, your group should turn in a summary of observations and/or conjectures, but not necessarily code. Send your les via e-mail to [email protected] and [email protected]. It is preferable that the work is turned in by Thursday night. However, at the very latest, please send your work by 12:00 p.m. (noon) on Friday, August 16. 1 Envelopes, Evolutes, and Euclidean Distance Degree Read the section in Cox-Little-O'Shea's Ideals, Varieties, and Algorithms on envelopes of families of curves - this is in Chapter 3, section 4. We will expand slightly on the setup in Chapter 3 as follows. A rational family of lines is dened as a polynomial of the form Lt(x; y) 2 Q(t)[x; y] 1 L (x; y) = (A(t)x + B(t)y + C(t)); t G(t) where A(t);B(t);C(t); and G(t) are polynomials in t. The envelope of Lt(x; y) is the locus of and so that there is some satisfying and @Lt(x;y) . As usual, x y t Lt(x; y) = 0 @t = 0 we can handle this by introducing a new variable s which plays the role of 1=G(t). -

The Geometry of Smooth Quartics
The Geometry of Smooth Quartics Jakub Witaszek Born 1st December 1990 in Pu lawy, Poland June 6, 2014 Master's Thesis Mathematics Advisor: Prof. Dr. Daniel Huybrechts Mathematical Institute Mathematisch-Naturwissenschaftliche Fakultat¨ der Rheinischen Friedrich-Wilhelms-Universitat¨ Bonn Contents 1 Preliminaries 8 1.1 Curves . .8 1.1.1 Singularities of plane curves . .8 1.1.2 Simultaneous resolutions of singularities . 11 1.1.3 Spaces of plane curves of fixed degree . 13 1.1.4 Deformations of germs of singularities . 14 1.2 Locally stable maps and their singularities . 15 1.2.1 Locally stable maps . 15 1.2.2 The normal-crossing condition and transversality . 16 1.3 Picard schemes . 17 1.4 The enumerative theory . 19 1.4.1 The double-point formula . 19 1.4.2 Polar loci . 20 1.4.3 Nodal rational curves on K3 surfaces . 21 1.5 Constant cycle curves . 22 3 1.6 Hypersurfaces in P .......................... 23 1.6.1 The Gauss map . 24 1.6.2 The second fundamental form . 25 3 2 The geometry of smooth quartics in P 27 2.1 Properties of Gauss maps . 27 2.1.1 A local description . 27 2.1.2 A classification of tangent curves . 29 2.2 The parabolic curve . 32 2.3 Bitangents, hyperflexes and the flecnodal curve . 34 2.3.1 Bitangents . 34 2.3.2 Global properties of the flecnodal curve . 35 2.3.3 The flecnodal curve in local coordinates . 36 2 The Geometry of Smooth Quartics 2.4 Gauss swallowtails . 39 2.5 The double-cover curve . -

Unified Higher Order Path and Envelope Curvature Theories in Kinematics
UNIFIED HIGHER ORDER PATH AND ENVELOPE CURVATURE THEORIES IN KINEMATICS By MALLADI NARASH1HA SIDDHANTY I; Bachelor of Engineering Osmania University Hyderabad, India 1965 Master of Technology Indian Institute of Technology Madras, India 1969 Submitted to the Faculty of the Graduate College of the Oklahoma State University in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY December, 1979 UNIFIED HIGHER ORDER PATH AND ENVELOPE CURVATURE THEORIES IN KINEMATICS Thesis Approved: Thesis Adviser J ~~(}W>p~ Dean of the Graduate College To Mukunda, Ananta, and the Mothers ACKNOWLEDGMENTS I take this opportunity to express my deep sense of gratitude and thanks to Professor A. H. Soni, chairman of my doctoral committee, for his keen interest in introducing me to various aspects of research in kinematics and his continued guidance with proper financial support. I thank the "Soni Family" for many warm dinners and hospitality. I am thankful to Professors L. J. Fila, P. F. Duvall, J. P. Chandler, and T. E. Blejwas for serving on my committee and for their advice and encouragement. Thanks are also due to Professor F. Freudenstein of Columbia University for serving on my committee and for many encouraging discussions on the subject. I thank Magnetic Peripherals, Inc., Oklahoma City, Oklahoma, my em ployer since the fall of 1977, for the computer facilities and the tui tion fee reimbursement. I thank all my fellow graduate students and friends at Stillwater and Oklahoma City for their warm friendship and discussions that made my studies in Oklahoma really rewarding. I remember and thank my former professors, B. -
The Rise of Projective Geometry II
The Rise of Projective Geometry II The Renaissance Artists Although isolated results from earlier periods are now considered as belonging to the subject of projective geometry, the fundamental ideas that form the core of this area stem from the work of artists during the Renaissance. Earlier art appears to us as being very stylized and flat. The Renaissance Artists Towards the end of the 13th century, early Renaissance artists began to attempt to portray situations in a more realistic way. One early technique is known as terraced perspective, where people in a group scene that are further in the back are drawn higher up than those in the front. Simone Martini: Majesty The Renaissance Artists As artists attempted to find better techniques to improve the realism of their work, the idea of vertical perspective was developed by the Italian school of artists (for example Duccio (1255-1318) and Giotto (1266-1337)). To create the sense of depth, parallel lines in the scene are represented by lines that meet in the centerline of the picture. Duccio's Last Supper The Renaissance Artists The modern system of focused perspective was discovered around 1425 by the sculptor and architect Brunelleschi (1377-1446), and formulated in a treatise a few years later by the painter and architect Leone Battista Alberti (1404-1472). The method was perfected by Leonardo da Vinci (1452 – 1519). The German artist Albrecht Dürer (1471 – 1528) introduced the term perspective (from the Latin verb meaning “to see through”) to describe this technique and illustrated it by a series of well- known woodcuts in his book Underweysung der Messung mit dem Zyrkel und Rychtsscheyed [Instruction on measuring with compass and straight edge] in 1525. -

Maximum Area Ellipses Inscribing Specific Quadrilaterals
Proceedings of The Canadian Society for Mechanical Engineering International Congress 2016 2016 CCToMM M3 Symposium June 26-29, 2016, Kelowna, British Columbia, Canada MAXIMUM AREA ELLIPSES INSCRIBING SPECIFIC QUADRILATERALS M. John D. Hayes Department of Mechanical and Aerospace Engineering Carleton University Ottawa, ON., Canada [email protected] Abstract— In this paper synthetic and analytic projective and isotropy of the mechanism, while the polygon is defined by the Euclidean geometry are used to map the unit circle inscribing reachable workspace of the mechanism [2]. There, the approach the unit square to an ellipse possessing the largest area inscribing is a numerical maximization problem, essentially fitting the special prescribed convex quadrilaterals; namely parallelograms largest area inscribing ellipse starting with a unit circle. and trapezoids. The transformation of the unit circle to the There are only a handful of papers that report investigations inscribing ellipse is the inverse transformation that maps the ver- into determining maximum area ellipses inscribing arbitrary tices of the convex quadrilateral to the vertices of the unit square. polygons, to the best of the author’s knowledge. The dual We describe the computational geometric details of determining problem, that is the problem of determining the polygons of the transformation matrix that is used in the mapping. Addi- greatest area inscribed in an ellipse is reported in [3]. While tionally, employing synthetic geometric arguments, we prove interesting, this dual problem is not germane to determining that the resulting inscribing ellipses are the ones possessing the the maximum area ellipse inscribing a polygon. Three papers maximum area in the corresponding one parameter pencil of by the same author [8-10] appear to lead to a solution to the ellipses inscribing the prescribed convex quadrilaterals.