On the Pentadeltoid'
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Orthocorrespondence and Orthopivotal Cubics
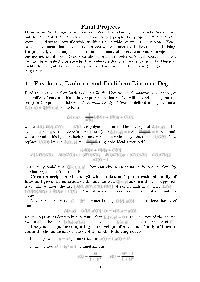
Forum Geometricorum b Volume 3 (2003) 1–27. bbb FORUM GEOM ISSN 1534-1178 Orthocorrespondence and Orthopivotal Cubics Bernard Gibert Abstract. We define and study a transformation in the triangle plane called the orthocorrespondence. This transformation leads to the consideration of a fam- ily of circular circumcubics containing the Neuberg cubic and several hitherto unknown ones. 1. The orthocorrespondence Let P be a point in the plane of triangle ABC with barycentric coordinates (u : v : w). The perpendicular lines at P to AP , BP, CP intersect BC, CA, AB respectively at Pa, Pb, Pc, which we call the orthotraces of P . These orthotraces 1 lie on a line LP , which we call the orthotransversal of P . We denote the trilinear ⊥ pole of LP by P , and call it the orthocorrespondent of P . A P P ∗ P ⊥ B C Pa Pc LP H/P Pb Figure 1. The orthotransversal and orthocorrespondent In barycentric coordinates, 2 ⊥ 2 P =(u(−uSA + vSB + wSC )+a vw : ··· : ···), (1) Publication Date: January 21, 2003. Communicating Editor: Paul Yiu. We sincerely thank Edward Brisse, Jean-Pierre Ehrmann, and Paul Yiu for their friendly and valuable helps. 1The homography on the pencil of lines through P which swaps a line and its perpendicular at P is an involution. According to a Desargues theorem, the points are collinear. 2All coordinates in this paper are homogeneous barycentric coordinates. Often for triangle cen- ters, we list only the first coordinate. The remaining two can be easily obtained by cyclically permut- ing a, b, c, and corresponding quantities. Thus, for example, in (1), the second and third coordinates 2 2 are v(−vSB + wSC + uSA)+b wu and w(−wSC + uSA + vSB )+c uv respectively. -

Generalization of the Pedal Concept in Bidimensional Spaces. Application to the Limaçon of Pascal• Generalización Del Concep
Generalization of the pedal concept in bidimensional spaces. Application to the limaçon of Pascal• Irene Sánchez-Ramos a, Fernando Meseguer-Garrido a, José Juan Aliaga-Maraver a & Javier Francisco Raposo-Grau b a Escuela Técnica Superior de Ingeniería Aeronáutica y del Espacio, Universidad Politécnica de Madrid, Madrid, España. [email protected], [email protected], [email protected] b Escuela Técnica Superior de Arquitectura, Universidad Politécnica de Madrid, Madrid, España. [email protected] Received: June 22nd, 2020. Received in revised form: February 4th, 2021. Accepted: February 19th, 2021. Abstract The concept of a pedal curve is used in geometry as a generation method for a multitude of curves. The definition of a pedal curve is linked to the concept of minimal distance. However, an interesting distinction can be made for . In this space, the pedal curve of another curve C is defined as the locus of the foot of the perpendicular from the pedal point P to the tangent2 to the curve. This allows the generalization of the definition of the pedal curve for any given angle that is not 90º. ℝ In this paper, we use the generalization of the pedal curve to describe a different method to generate a limaçon of Pascal, which can be seen as a singular case of the locus generation method and is not well described in the literature. Some additional properties that can be deduced from these definitions are also described. Keywords: geometry; pedal curve; distance; angularity; limaçon of Pascal. Generalización del concepto de curva podal en espacios bidimensionales. Aplicación a la Limaçon de Pascal Resumen El concepto de curva podal está extendido en la geometría como un método generativo para multitud de curvas. -

Automated Study of Isoptic Curves: a New Approach with Geogebra∗
Automated study of isoptic curves: a new approach with GeoGebra∗ Thierry Dana-Picard1 and Zoltan Kov´acs2 1 Jerusalem College of Technology, Israel [email protected] 2 Private University College of Education of the Diocese of Linz, Austria [email protected] March 7, 2018 Let C be a plane curve. For a given angle θ such that 0 ≤ θ ≤ 180◦, a θ-isoptic curve of C is the geometric locus of points in the plane through which pass a pair of tangents making an angle of θ.If θ = 90◦, the isoptic curve is called the orthoptic curve of C. For example, the orthoptic curves of conic sections are respectively the directrix of a parabola, the director circle of an ellipse, and the director circle of a hyperbola (in this case, its existence depends on the eccentricity of the hyperbola). Orthoptics and θ-isoptics can be studied for other curves than conics, in particular for closed smooth strictly convex curves,as in [1]. An example of the study of isoptics of a non-convex non-smooth curve, namely the isoptics of an astroid are studied in [2] and of Fermat curves in [3]. The Isoptics of an astroid present special properties: • There exist points through which pass 3 tangents to C, and two of them are perpendicular. • The isoptic curve are actually union of disjoint arcs. In Figure 1, the loops correspond to θ = 120◦ and the arcs connecting them correspond to θ = 60◦. Such a situation has been encountered already for isoptics of hyperbolas. These works combine geometrical experimentation with a Dynamical Geometry System (DGS) GeoGebra and algebraic computations with a Computer Algebra System (CAS). -

Strophoids, a Family of Cubic Curves with Remarkable Properties
Hellmuth STACHEL STROPHOIDS, A FAMILY OF CUBIC CURVES WITH REMARKABLE PROPERTIES Abstract: Strophoids are circular cubic curves which have a node with orthogonal tangents. These rational curves are characterized by a series or properties, and they show up as locus of points at various geometric problems in the Euclidean plane: Strophoids are pedal curves of parabolas if the corresponding pole lies on the parabola’s directrix, and they are inverse to equilateral hyperbolas. Strophoids are focal curves of particular pencils of conics. Moreover, the locus of points where tangents through a given point contact the conics of a confocal family is a strophoid. In descriptive geometry, strophoids appear as perspective views of particular curves of intersection, e.g., of Viviani’s curve. Bricard’s flexible octahedra of type 3 admit two flat poses; and here, after fixing two opposite vertices, strophoids are the locus for the four remaining vertices. In plane kinematics they are the circle-point curves, i.e., the locus of points whose trajectories have instantaneously a stationary curvature. Moreover, they are projections of the spherical and hyperbolic analogues. For any given triangle ABC, the equicevian cubics are strophoids, i.e., the locus of points for which two of the three cevians have the same lengths. On each strophoid there is a symmetric relation of points, so-called ‘associated’ points, with a series of properties: The lines connecting associated points P and P’ are tangent of the negative pedal curve. Tangents at associated points intersect at a point which again lies on the cubic. For all pairs (P, P’) of associated points, the midpoints lie on a line through the node N. -

Elementary Euclidean Geometry an Introduction
Elementary Euclidean Geometry An Introduction C. G. GIBSON PUBLISHED BY THE PRESS SYNDICATE OF THE UNIVERSITY OF CAMBRIDGE The Pitt Building, Trumpington Street, Cambridge, United Kingdom CAMBRIDGE UNIVERSITY PRESS The Edinburgh Building, Cambridge CB2 2RU, UK 40 West 20th Street, New York, NY 10011–4211, USA 477 Williamstown Road, Port Melbourne, VIC 3207, Australia Ruiz de Alarcon´ 13, 28014 Madrid, Spain Dock House, The Waterfront, Cape Town 8001, South Africa http://www.cambridge.org C Cambridge University Press 2003 This book is in copyright. Subject to statutory exception and to the provisions of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published 2003 Printed in the United Kingdom at the University Press, Cambridge Typeface Times 10/13 pt. System LATEX2ε [TB] A catalogue record for this book is available from the British Library Library of Congress Cataloguing in Publication data ISBN 0 521 83448 1 hardback Contents List of Figures page viii List of Tables x Preface xi Acknowledgements xvi 1 Points and Lines 1 1.1 The Vector Structure 1 1.2 Lines and Zero Sets 2 1.3 Uniqueness of Equations 3 1.4 Practical Techniques 4 1.5 Parametrized Lines 7 1.6 Pencils of Lines 9 2 The Euclidean Plane 12 2.1 The Scalar Product 12 2.2 Length and Distance 13 2.3 The Concept of Angle 15 2.4 Distance from a Point to a Line 18 3 Circles 22 3.1 Circles as Conics 22 3.2 General Circles 23 3.3 Uniqueness of Equations 24 3.4 Intersections with -

A Special Conic Associated with the Reuleaux Negative Pedal Curve
INTERNATIONAL JOURNAL OF GEOMETRY Vol. 10 (2021), No. 2, 33–49 A SPECIAL CONIC ASSOCIATED WITH THE REULEAUX NEGATIVE PEDAL CURVE LILIANA GABRIELA GHEORGHE and DAN REZNIK Abstract. The Negative Pedal Curve of the Reuleaux Triangle w.r. to a pedal point M located on its boundary consists of two elliptic arcs and a point P0. Intriguingly, the conic passing through the four arc endpoints and by P0 has one focus at M. We provide a synthetic proof for this fact using Poncelet’s porism, polar duality and inversive techniques. Additional interesting properties of the Reuleaux negative pedal w.r. to pedal point M are also included. 1. Introduction Figure 1. The sides of the Reuleaux Triangle R are three circular arcs of circles centered at each Reuleaux vertex Vi; i = 1; 2; 3. of an equilateral triangle. The Reuleaux triangle R is the convex curve formed by the arcs of three circles of equal radii r centered on the vertices V1;V2;V3 of an equilateral triangle and that mutually intercepts in these vertices; see Figure1. This triangle is mostly known due to its constant width property [4]. Keywords and phrases: conic, inversion, pole, polar, dual curve, negative pedal curve. (2020)Mathematics Subject Classification: 51M04,51M15, 51A05. Received: 19.08.2020. In revised form: 26.01.2021. Accepted: 08.10.2020 34 Liliana Gabriela Gheorghe and Dan Reznik Figure 2. The negative pedal curve N of the Reuleaux Triangle R w.r. to a point M on its boundary consist on an point P0 (the antipedal of M through V3) and two elliptic arcs A1A2 and B1B2 (green and blue). -

CATALAN's CURVE from a 1856 Paper by E. Catalan Part
CATALAN'S CURVE from a 1856 paper by E. Catalan Part - VI C. Masurel 13/04/2014 Abstract We use theorems on roulettes and Gregory's transformation to study Catalan's curve in the class C2(n; p) with angle V = π=2 − 2u and curves related to the circle and the catenary. Catalan's curve is defined in a 1856 paper of E. Catalan "Note sur la theorie des roulettes" and gives examples of couples of curves wheel and ground. 1 The class C2(n; p) and Catalan's curve The curves C2(n; p) shares many properties and the common angle V = π=2−2u (see part III). The polar parametric equations are: cos2n(u) ρ = θ = n tan(u) + 2:p:u cosn+p(2u) At the end of his 1856 paper Catalan looked for a curve such that rolling on a line the pole describe a circle tangent to the line. So by Steiner-Habich theorem this curve is the anti pedal of the wheel (see part I) associated to the circle when the base-line is the tangent. The equations of the wheel C2(1; −1) are : ρ = cos2(u) θ = tan(u) − 2:u then its anti-pedal (set p ! p + 1) is C2(1; 0) : cos2 u 1 ρ = θ = tan u −! ρ = cos 2u 1 − θ2 this is Catalan's curve (figure 1). 1 Figure 1: Catalan's curve : ρ = 1=(1 − θ2) 2 Curves such that the arc length s = ρ.θ with initial condition ρ = 1 when θ = 0 This relation implies by derivating : r dρ ds = ρdθ + dρθ = ρ2 + ( )2dθ dθ Squaring and simplifying give : 2ρθdθ dρ + (dρ)2θ2 = (dρ)2 So we have the evident solution dρ = 0 this the traditionnal circle : ρ = 1 But there is another one more exotic given by the other part of equation after we simplify by dρ 6= 0. -
Final Projects 1 Envelopes, Evolutes, and Euclidean Distance Degree
Final Projects Directions: Work together in groups of 1-5 on the following four projects. We suggest, but do not insist, that you work in a group of > 1 people. For projects 1,2, and 3, your group should write a text le with (working!) code which answers the questions. Please provide documentation for your code so that we can understand what the code is doing. For project 4, your group should turn in a summary of observations and/or conjectures, but not necessarily code. Send your les via e-mail to [email protected] and [email protected]. It is preferable that the work is turned in by Thursday night. However, at the very latest, please send your work by 12:00 p.m. (noon) on Friday, August 16. 1 Envelopes, Evolutes, and Euclidean Distance Degree Read the section in Cox-Little-O'Shea's Ideals, Varieties, and Algorithms on envelopes of families of curves - this is in Chapter 3, section 4. We will expand slightly on the setup in Chapter 3 as follows. A rational family of lines is dened as a polynomial of the form Lt(x; y) 2 Q(t)[x; y] 1 L (x; y) = (A(t)x + B(t)y + C(t)); t G(t) where A(t);B(t);C(t); and G(t) are polynomials in t. The envelope of Lt(x; y) is the locus of and so that there is some satisfying and @Lt(x;y) . As usual, x y t Lt(x; y) = 0 @t = 0 we can handle this by introducing a new variable s which plays the role of 1=G(t). -

Unified Higher Order Path and Envelope Curvature Theories in Kinematics
UNIFIED HIGHER ORDER PATH AND ENVELOPE CURVATURE THEORIES IN KINEMATICS By MALLADI NARASH1HA SIDDHANTY I; Bachelor of Engineering Osmania University Hyderabad, India 1965 Master of Technology Indian Institute of Technology Madras, India 1969 Submitted to the Faculty of the Graduate College of the Oklahoma State University in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY December, 1979 UNIFIED HIGHER ORDER PATH AND ENVELOPE CURVATURE THEORIES IN KINEMATICS Thesis Approved: Thesis Adviser J ~~(}W>p~ Dean of the Graduate College To Mukunda, Ananta, and the Mothers ACKNOWLEDGMENTS I take this opportunity to express my deep sense of gratitude and thanks to Professor A. H. Soni, chairman of my doctoral committee, for his keen interest in introducing me to various aspects of research in kinematics and his continued guidance with proper financial support. I thank the "Soni Family" for many warm dinners and hospitality. I am thankful to Professors L. J. Fila, P. F. Duvall, J. P. Chandler, and T. E. Blejwas for serving on my committee and for their advice and encouragement. Thanks are also due to Professor F. Freudenstein of Columbia University for serving on my committee and for many encouraging discussions on the subject. I thank Magnetic Peripherals, Inc., Oklahoma City, Oklahoma, my em ployer since the fall of 1977, for the computer facilities and the tui tion fee reimbursement. I thank all my fellow graduate students and friends at Stillwater and Oklahoma City for their warm friendship and discussions that made my studies in Oklahoma really rewarding. I remember and thank my former professors, B. -

Generating the Envelope of a Swept Trivariate Solid
GENERATING THE ENVELOPE OF A SWEPT TRIVARIATE SOLID Claudia Madrigal1 Center for Image Processing and Integrated Computing, and Department of Mathematics University of California, Davis Kenneth I. Joy2 Center for Image Processing and Integrated Computing Department of Computer Science University of California, Davis Abstract We present a method for calculating the envelope of the swept surface of a solid along a path in three-dimensional space. The generator of the swept surface is a trivariate tensor- product Bezier` solid and the path is a non-uniform rational B-spline curve. The boundary surface of the solid is the combination of parametric surfaces and an implicit surface where the determinant of the Jacobian of the defining function is zero. We define methods to calculate the envelope for each type of boundary surface, defining characteristic curves on the envelope and connecting them with triangle strips. The envelope of the swept solid is then calculated by taking the union of the envelopes of the family of boundary surfaces, defined by the surface of the solid in motion along the path. Keywords: trivariate splines; sweeping; envelopes; solid modeling. 1Department of Mathematics University of California, Davis, CA 95616-8562, USA; e-mail: madri- [email protected] 2Corresponding Author, Department of Computer Science, University of California, Davis, CA 95616-8562, USA; e-mail: [email protected] 1 1. Introduction Geometric modeling systems construct complex models from objects based on simple geo- metric primitives. As the needs of these systems become more complex, it is necessary to expand the inventory of geometric primitives and design operations. -

Safe Domain and Elementary Geometry
Safe domain and elementary geometry Jean-Marc Richard Laboratoire de Physique Subatomique et Cosmologie, Universit´eJoseph Fourier– CNRS-IN2P3, 53, avenue des Martyrs, 38026 Grenoble cedex, France November 8, 2018 Abstract A classical problem of mechanics involves a projectile fired from a given point with a given velocity whose direction is varied. This results in a family of trajectories whose envelope defines the border of a “safe” domain. In the simple cases of a constant force, harmonic potential, and Kepler or Coulomb motion, the trajectories are conic curves whose envelope in a plane is another conic section which can be derived either by simple calculus or by geometrical considerations. The case of harmonic forces reveals a subtle property of the maximal sum of distances within an ellipse. 1 Introduction A classical problem of classroom mechanics and military academies is the border of the so-called safe domain. A projectile is set off from a point O with an initial velocity v0 whose modulus is fixed by the intrinsic properties of the gun, while its direction can be varied arbitrarily. Its is well-known that, in absence of air friction, each trajectory is a parabola, and that, in any vertical plane containing O, the envelope of all trajectories is another parabola, which separates the points which can be shot from those which are out of reach. This will be shortly reviewed in Sec. 2. Amazingly, the problem of this envelope parabola can be addressed, and solved, in terms of elementary geometrical properties. arXiv:physics/0410034v1 [physics.ed-ph] 6 Oct 2004 In elementary mechanics, there are similar problems, that can be solved explicitly and lead to families of conic trajectories whose envelope is also a conic section. -

PHD THESIS ISOPTIC CURVES and SURFACES Csima Géza Supervisor
PHD THESIS ISOPTIC CURVES AND SURFACES Csima Géza Supervisor: Szirmai Jenő associate professor BUTE Mathematical Institute, Department of Geometry BUTE 2017 Contents 0.1 Introduction . V 1 Isoptic curves on the Euclidean plane 1 1.1 Isoptics of closed strictly convex curves . 1 1.1.1 Example . 3 1.2 Isoptic curves of Euclidean conic sections . 4 1.2.1 Ellipse . 5 1.2.2 Hyperbola . 7 1.2.3 Parabola . 10 1.3 Isoptic curves to finite point sets . 12 1.4 Inverse problem . 15 2 Isoptic surfaces in the Euclidean space 18 2.1 Isoptic hypersurfaces in En ........................ 18 2.1.1 Isoptic hypersurface of (n−1)−dimensional compact hypersur- faces in En ............................. 19 2.1.2 Isoptic surface of rectangles . 20 2.1.3 Isoptic surface of ellipsoids . 23 2.2 Isoptic surfaces of polyhedra . 25 2.2.1 Computations of the isoptic surface of a given regular tetrahedron 27 2.2.2 Some isoptic surfaces to Platonic and Archimedean polyhedra 29 3 Isoptic curves of conics in non-Euclidean constant curvature geome- tries 31 3.1 Projective model . 31 3.1.1 Example: Isoptic curve of the line segment on the hyperbolic and elliptic plane . 32 3.1.2 The general method . 33 3.2 Elliptic conics and their isoptics . 34 3.2.1 Equation of the elliptic ellipse and hyperbola . 34 3.2.2 Equation of the elliptic parabola . 36 II 3.2.3 Isoptic curves of elliptic ellipse and hyperbola . 36 3.2.4 Isoptic curves of elliptic parabola . 37 3.3 Hyperbolic conic sections and their isoptics .