Hard Limits and Performance Tradeoffs in a Class Of
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Control Engineering for High School Students and Teachers: an Online Platform Development
Control Engineering for High School Students and Teachers: An Online Platform Development Farhad Farokhi and Iman Shames Contents Report ............................................ 1 1 Introduction . 1 2 Courses . 1 3 Interviews . 2 4 Educational games . 3 5 Remote laboratory . 4 6 Conclusions and future work . 5 Appendix .......................................... 6 A Example course 1: Feedback theory . 6 B Example course 2: Models . 9 C Example course 3: On/off control . 12 D Remote laboratory (RLAB) manual . 13 1 Introduction Based on our teen years and feedback from many of our colleagues and friends, we believe that the control engineering, although being a major building block of automated system in many processes and infrastructures, is a fairly alien subject to the students, parents, and teachers. Therefore, there is a need for introducing feedback control and its application to high school students and their teachers to recruit the next generation of engineers and scientists in this field. We also believe that the academic community has a responsibility to disseminate the information cheaply, if not freely, to a wide range of interested audience, be it students, parents, or teachers, across the globe. This way, we can guarantee that people from different socio- economic backgrounds and in different countries can make informed decisions regarding their careers and those of their friends and families. Motivated by these needs, in this project, we have attempted at developing an online platform for the students and their educators to read about the control engineering, watch lectures by researchers from academia and industry, access interviews with successful people in the control engineering community, and play online games to test their understanding and to possibly learn about the applications of the automatic control. -

EE C128 Chapter 10
Lecture abstract EE C128 / ME C134 – Feedback Control Systems Topics covered in this presentation Lecture – Chapter 10 – Frequency Response Techniques I Advantages of FR techniques over RL I Define FR Alexandre Bayen I Define Bode & Nyquist plots I Relation between poles & zeros to Bode plots (slope, etc.) Department of Electrical Engineering & Computer Science st nd University of California Berkeley I Features of 1 -&2 -order system Bode plots I Define Nyquist criterion I Method of dealing with OL poles & zeros on imaginary axis I Simple method of dealing with OL stable & unstable systems I Determining gain & phase margins from Bode & Nyquist plots I Define static error constants September 10, 2013 I Determining static error constants from Bode & Nyquist plots I Determining TF from experimental FR data Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 1 / 64 Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 2 / 64 10 FR techniques 10.1 Intro Chapter outline 1 10 Frequency response techniques 1 10 Frequency response techniques 10.1 Introduction 10.1 Introduction 10.2 Asymptotic approximations: Bode plots 10.2 Asymptotic approximations: Bode plots 10.3 Introduction to Nyquist criterion 10.3 Introduction to Nyquist criterion 10.4 Sketching the Nyquist diagram 10.4 Sketching the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.7 Stability, gain margin, and -

Download Chapter 161KB
Memorial Tributes: Volume 3 HENDRIK WADE BODE 50 Copyright National Academy of Sciences. All rights reserved. Memorial Tributes: Volume 3 HENDRIK WADE BODE 51 Hendrik Wade Bode 1905–1982 By Harvey Brooks Hendrik Wade Bode was widely known as one of the most articulate, thoughtful exponents of the philosophy and practice of systems engineering—the science and art of integrating technical components into a coherent system that is optimally adapted to its social function. After a career of more than forty years with Bell Telephone Laboratories, which he joined shortly after its founding in 1926, Dr. Bode retired in 1967 to become Gordon McKay Professor of Systems Engineering (on a half-time basis) in what was then the Division of Engineering and Applied Physics at Harvard. He became professor emeritus in July 1974. He died at his home in Cambridge on June 21, 1982, at the age of seventy- six. He is survived by his wife, Barbara Poore Bode, whom he married in 1933, and by two daughters, Dr. Katharine Bode Darlington of Philadelphia and Mrs. Anne Hathaway Bode Aarnes of Washington, D.C. Hendrik Bode was born in Madison, Wisconsin, on December 24, 1905. After attending grade school in Tempe, Arizona, and high school in Urbana, Illinois, he went on to Ohio State University, from which he received his B.A. in 1924 and his M.A. in 1926, both in mathematics. He joined Bell Labs in 1926 to work on electrical network theory and the design of electric filters. While at Bell, he also pursued graduate studies at Columbia University, receiving his Ph.D. -

MT-033: Voltage Feedback Op Amp Gain and Bandwidth
MT-033 TUTORIAL Voltage Feedback Op Amp Gain and Bandwidth INTRODUCTION This tutorial examines the common ways to specify op amp gain and bandwidth. It should be noted that this discussion applies to voltage feedback (VFB) op amps—current feedback (CFB) op amps are discussed in a later tutorial (MT-034). OPEN-LOOP GAIN Unlike the ideal op amp, a practical op amp has a finite gain. The open-loop dc gain (usually referred to as AVOL) is the gain of the amplifier without the feedback loop being closed, hence the name “open-loop.” For a precision op amp this gain can be vary high, on the order of 160 dB (100 million) or more. This gain is flat from dc to what is referred to as the dominant pole corner frequency. From there the gain falls off at 6 dB/octave (20 dB/decade). An octave is a doubling in frequency and a decade is ×10 in frequency). If the op amp has a single pole, the open-loop gain will continue to fall at this rate as shown in Figure 1A. A practical op amp will have more than one pole as shown in Figure 1B. The second pole will double the rate at which the open- loop gain falls to 12 dB/octave (40 dB/decade). If the open-loop gain has dropped below 0 dB (unity gain) before it reaches the frequency of the second pole, the op amp will be unconditionally stable at any gain. This will be typically referred to as unity gain stable on the data sheet. -

Loop Stability Compensation Technique for Continuous-Time Common-Mode Feedback Circuits
Loop Stability Compensation Technique for Continuous-Time Common-Mode Feedback Circuits Young-Kyun Cho and Bong Hyuk Park Mobile RF Research Section, Advanced Mobile Communications Research Department Electronics and Telecommunications Research Institute (ETRI) Daejeon, Korea Email: [email protected] Abstract—A loop stability compensation technique for continuous-time common-mode feedback (CMFB) circuits is presented. A Miller capacitor and nulling resistor in the compensation network provide a reliable and stable operation of the fully-differential operational amplifier without any performance degradation. The amplifier is designed in a 130 nm CMOS technology, achieves simulated performance of 57 dB open loop DC gain, 1.3-GHz unity-gain frequency and 65° phase margin. Also, the loop gain, bandwidth and phase margin of the CMFB are 51 dB, 27 MHz, and 76°, respectively. Keywords-common-mode feedback, loop stability compensation, continuous-time system, Miller compensation. Fig. 1. Loop stability compensation technique for CMFB circuit. I. INTRODUCTION common-mode signal to the opamp. In Fig. 1, two poles are The differential output amplifiers usually contain common- newly generated from the CMFB loop. A dominant pole is mode feedback (CMFB) circuitry [1, 2]. A CMFB circuit is a introduced at the opamp output and the second pole is located network sensing the common-mode voltage, comparing it with at the VCMFB node. Typically, the location of these poles are a proper reference, and feeding back the correct common-mode very close which deteriorates the loop phase margin (PM) and signal with the purpose to cancel the output common-mode makes the closed loop system unstable. -

Measuring the Control Loop Response of a Power Supply Using an Oscilloscope ––
Measuring the Control Loop Response of a Power Supply Using an Oscilloscope –– APPLICATION NOTE MSO 5/6 with built-in AFG AFG Signal Injection Transformers J2100A/J2101A VIN VOUT TPP0502 TPP0502 5Ω RINJ T1 Modulator R1 fb – comp R2 + + VREF – Measuring the Control Loop Response of a Power Supply Using an Oscilloscope APPLICATION NOTE Most power supplies and regulators are designed to maintain a Introduction to Frequency Response constant voltage over a specified current range. To accomplish Analysis this goal, they are essentially amplifiers with a closed feedback loop. An ideal supply needs to respond quickly and maintain The frequency response of a system is a frequency-dependent a constant output, but without excessive ringing or oscillation. function that expresses how a reference signal (usually a Control loop measurements help to characterize how a power sinusoidal waveform) of a particular frequency at the system supply responds to changes in output load conditions. input (excitation) is transferred through the system. Although frequency response analysis may be performed A generalized control loop is shown in Figure 1 in which a using dedicated equipment, newer oscilloscopes may be sinewave a(t) is applied to a system with transfer function used to measure the response of a power supply control G(s). After transients due to initial conditions have decayed loop. Using an oscilloscope, signal source and automation away, the output b(t) becomes a sinewave but with a different software, measurements can be made quickly and presented magnitude B and relative phase Φ. The magnitude and phase as familiar Bode plots, making it easy to evaluate margins and of the output b(t) are in fact related to the transfer function compare circuit performance to models. -

Affine Laws and Learning Approaches for Witsenhausen
Special Topics Seminar Affine Laws and Learning Approaches for Witsenhausen Counterexample Hajir Roozbehani Dec 7, 2011 Outline I Optimal Control Problems I Affine Laws I Separation Principle I Information Structure I Team Decision Problems I Witsenhausen Counterexample I Sub-optimality of Affine Laws I Quantized Control I Learning Approach Linear Systems Discrete Time Representation In a classical multistage stochastic control problem, the dynamics are x(t + 1) = Fx(t) + Gu(t) + w(t) y(t) = Hx(t) + v(t); where v(t) and y(t) are independent sequences of random variables and u(t) = γ(y(t)) is the control law (or decision rule). A cost function J(γ; x(0)) is to be minimized. Linear Systems Discrete Time Representation In a classical multistage stochastic control problem, the dynamics are x(t + 1) = Fx(t) + Gu(t) + w(t) y(t) = Hx(t) + v(t); where v(t) and y(t) are independent sequences of random variables and u(t) = γ(y(t)) is the control law (or decision rule). A cost function J(γ; x(0)) is to be minimized. Success Stories with Affine Laws LQR Consider a linear dynamical system n m x(t + 1) = Fx(t) + Gu(t); x(t) 2 R ; u(t) 2 R with complete information and the task of finding a pair (x(t); u(t)) that minimizes the functional T X 0 0 J(u(t)) = [x(t) Qx(t) + u(t) Ru(t)]; t=0 subject to the described dynamical constraints and for Q > 0; R > 0. This is a convex optimization problem with an affine solution: 0 u∗(t) = −R−1B P(t)x(t); where P(t) is to be found by solving algebraic Riccati equations. -
Symbolic Analysis of Linear Electric Circuits with Maxima
Dejan V. Tošić, Milka M. Potrebić, Symbolic analysis of linear electric circuits with Maxima CAS, Application of Free Software and Open Hardware, PSSOH 2019, International Conference, University of Belgrade – School of Electrical Engineering, Belgrade, Serbia, Oct. 26, 2019. http://pssoh.etf.bg.ac.rs/ Symbolic analysis of linear electric circuits with Maxima CAS Dejan V. Tošić, Milka M. Potrebić University of Belgrade – School of Electrical Engineering, Belgrade, Serbia [email protected], [email protected] Application of Free Software and Open Hardware, PSSOH 2019, International Conference, University of Belgrade – School of Electrical Engineering, Belgrade, Serbia, Oct. 26, 2019. http://pssoh.etf.bg.ac.rs/ Dejan V. Tošić, Milka M. Potrebić, Symbolic analysis of linear electric circuits with Maxima CAS, Application of Free Software and Open Hardware, PSSOH 2019, International Conference, University of Belgrade – School of Electrical Engineering, Belgrade, Serbia, Oct. 26, 2019. http://pssoh.etf.bg.ac.rs/ What is symbolic simulation ● Symbolic simulation or analysis is a formal technique to calculate the behavior or a characteristic of a system (e.g. digital system, electronic circuit, or continuous-time system) with an independent variable (sample index, time, or frequency), the dependent variables (sample values, signals, voltages, and currents), and (some or all) the element values represented by symbols. ● A symbolic simulator is a computer program that receives the system description as input and can automatically carry out the symbolic analysis and thus generate the symbolic expression for the desired system characteristic. ● P. Lin, Symbolic Network Analysis. Amsterdam, The Netherlands: Elsevier, 1991. ● G. Gielen and W. Sansen, Symbolic Analysis for Automated Design of Analog Integrated Circuits. -
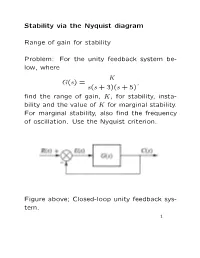
Stability Via the Nyquist Diagram Range of Gain for Stability Problem
Stability via the Nyquist diagram Range of gain for stability Problem: For the unity feedback system be- low, where K G(s)= , s(s + 3)(s + 5) find the range of gain, K, for stability, insta- bility and the value of K for marginal stability. For marginal stability, also find the frequency of oscillation. Use the Nyquist criterion. Figure above; Closed-loop unity feedback sys- tem. 1 Solution: K G(jω)= s jω s(s + 3)(s + 5)| → 8Kω j K(15 ω2) = − − · − 64ω3 + ω(15 ω2)2 − When K = 1, 8ω j (15 ω2) G(jω)= − − · − 64ω3 + ω(15 ω2)2 − Important points: Starting point: ω = 0, G(jω)= 0.0356 j − − ∞ Ending point: ω = , G(jω) = 0 270 ∞ 6 − ◦ Real axis crossing: found by setting the imag- inary part of G(jω) as zero, K ω = √15, , j0 {−120 } 2 When K = 1, P = 0, from the Nyquist plot, N is zero, so the system is stable. The real axis crossing K does not encircle [ 1, j0)] −120 − until K = 120. At that point, the system is marginally stable, and the frequency of oscilla- tion is ω = √15 rad/s. Nyquist Diagram Nyquist Diagram 0.05 2 0.04 0.03 1.5 0.02 System: G 1 Real: −0.00824 0.01 Imag: 1e−005 Frequency (rad/sec): −3.91 0.5 0 0 Imaginary Axis −0.01 Imaginary Axis −0.5 −0.02 −1 −0.03 −0.04 −1.5 −0.05 −2 −0.1 −0.08 −0.06 −0.04 −0.02 0 0.02 0.04 0.06 0.08 0.1 −3 −2.5 −2 −1.5 −1 −0.5 0 Real Axis Real Axis (a) (b) Figure above; Nyquist plots of ( )= K ; G s s(s+3)(s+5) (a) K = 1; (b)K = 120. -

Mirostat:Aneural Text Decoding Algorithm That Directly Controls Perplexity
Published as a conference paper at ICLR 2021 MIROSTAT:ANEURAL TEXT DECODING ALGORITHM THAT DIRECTLY CONTROLS PERPLEXITY Sourya Basu∗ Govardana Sachitanandam Ramachandrany Nitish Shirish Keskary Lav R. Varshney∗;y ∗Department of Electrical and Computer Engineering, University of Illinois at Urbana-Champaign ySalesforce Research ABSTRACT Neural text decoding algorithms strongly influence the quality of texts generated using language models, but popular algorithms like top-k, top-p (nucleus), and temperature-based sampling may yield texts that have objectionable repetition or incoherence. Although these methods generate high-quality text after ad hoc pa- rameter tuning that depends on the language model and the length of generated text, not much is known about the control they provide over the statistics of the output. This is important, however, since recent reports show that humans pre- fer when perplexity is neither too much nor too little and since we experimen- tally show that cross-entropy (log of perplexity) has a near-linear relation with repetition. First we provide a theoretical analysis of perplexity in top-k, top-p, and temperature sampling, under Zipfian statistics. Then, we use this analysis to design a feedback-based adaptive top-k text decoding algorithm called mirostat that generates text (of any length) with a predetermined target value of perplexity without any tuning. Experiments show that for low values of k and p, perplexity drops significantly with generated text length and leads to excessive repetitions (the boredom trap). Contrarily, for large values of k and p, perplexity increases with generated text length and leads to incoherence (confusion trap). Mirostat avoids both traps. -

Università Degli Studi Di Padova Padua
Università degli Studi di Padova Padua Research Archive - Institutional Repository Negative Feedback, Amplifiers, Governors, and More Original Citation: Availability: This version is available at: 11577/3257394 since: 2018-02-15T15:55:12Z Publisher: Institute of Electrical and Electronics Engineers Inc. Published version: DOI: 10.1109/MIE.2017.2726244 Terms of use: Open Access This article is made available under terms and conditions applicable to Open Access Guidelines, as described at http://www.unipd.it/download/file/fid/55401 (Italian only) (Article begins on next page) Historical by Massimo Guarnieri Negative Feedback, Amplifiers, Governors, and More Massimo Guarnieri he invention of the negative feed- Henry (1797–1878) and Samuel Morse (1873–1961), the holder of a similar back amplifier by Harold S. Black (1791–1872) and was very successful patent of 1916. In the final courtroom T (1898–1983) in 1928 is consid- against the attenuation of telegraph digi- battle in 1934, the Supreme Court ruled ered one of the great achievements in tal signals. in favor of De Forest. Meanwhile, in electronics. In fact, it is listed among Telephone lines, which started to 1922, Armstrong introduced the su- the IEEE Milestones, where it is cred- be laid in the 1880s, were also prone perregenerative receiver, which used ited to Bell Labs. Black was hired by to attenuation. However, their signals a larger part of the signal to obtain Western Electric in 1921 and as- were analog, so regeneration based on an even higher amplification (gain signed to work on the Type C system, a just an electrochemical battery and around 1 million). -

Considerations for Measuring Loop Gain in Power Supplies
Power Supply Design Seminar Considerations for Measuring Loop Gain in Power Supplies Reproduced from 2018 Texas Instruments Power Supply Design Seminar SEM2300, Topic 6 TI Literature Number: SLUP386 © 2018 Texas Instruments Incorporated Power Supply Design Seminar resources are available at: www.ti.com/psds Considerations for Measuring Loop Gain in Power Supplies Manjing Xie ABSTRACT Loop gain measurements show how stable a power supply is and provide insight to improve output transient response. This presentation discusses the theory of open-loop transfer functions and empirical loop gain measurement methods. The presentation then demonstrates how to configure the frequency analyzer and prepare the power supply under test for accurate loop gain measurements. Examples are provided to illustrate proper loop gain measurement techniques. I. INTRODUCTION Figure 2 includes a power stage, the output feedback resistor divider, pulse width modulation Loop gain is the product of all gains around a (PWM) comparator and error amplifier with feedback loop. Figure 1 shows a simple system compensation network. The power stage contains with negative feedback. the power devices, magnetics and capacitors, which V VIN + OUT G(s) transfer energy from the input source to the output. - The output is sensed by the feedback resistor divider. The error amplifier with the compensation network T(s) forms the compensator which amplifies the error between the output feedback (FB) and the reference H(s) voltage, VREF. The output of the compensator, COMP, is modulated by the PWM comparator Figure 1 – Block diagram of a feedback system. which converts COMP, a continuous signal, into a discrete driving signal. When the driving signal is The loop gain of this system is defined as: high, the buck converter low-side MOSFET is T(s)=G(s)⋅ H(s) (1) turned off and high-side MOSFET is turned on.