Strategies for Successful Implementation of Virtual Weigh and Compliance Systems in California
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Trucking in Nevada
2004 Nevada Commercial Vehicle Handbook Nevada Department of Transportation In Cooperation with F TRA O NS NT P E O M R T T A R T A I Nevada Department of P O E N Federal Highway D A LL RY F NT OR OUR COU U N A I C T I E R Nevada Department of Motor Vehicles D E ST A M Administration ATES OF TOR T O RA M N A S D P A O V R E T N F M C S A A SS N Federal Motor Carrier Safety Administration OCIATIO 2004 NEVADA COMMERCIAL VEHICLE HANDBOOK Trucking in Nevada A Handbook for Commercial Vehicle Operators January 2004 I 2004 NEVADA COMMERCIAL VEHICLE HANDBOOK 2004 NEVADA COMMERCIAL VEHICLE HANDBOOK DISCLAIMER This document constitutes the general guidelines for operation of a commercial vehicle in Nevada and is not intended to be all-inclusive. If further information is required, contact the appropriate agency listed in the Helpful Numbers section on page X. The Department of Motor Vehicles website is located at www.dmvnv.com. In addition, you can log on to NDOT’s website at www.nevadadot.com/business/trucker. For Nevada Revised Statutes (NRS) or Nevada Administrative Codes (NAC) on trucking in Nevada, you can log on to the legislative website at www.leg.state.nv.us. II 2004 NEVADA COMMERCIAL VEHICLE HANDBOOK 2004 NEVADA COMMERCIAL VEHICLE HANDBOOK Trucking in Nevada Director’s Message Safe and simple! That’s our travel goal for all Nevada motorists. But it means more to people who earn their living hauling the goods that we use every day. -

Commercial Vehicle Operations - Roadside
Intelligent Transportation Systems Field Operational Test Cross-Cutting Study Commercial Vehicle Operations - Roadside November 1998 Prepared for: By: U.S. Department of Transportation Booz·Allen & Hamilton Federal Highway Administration Highway & Vehicle Technology Group Washington, D.C. McLean, Virginia Notice This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. FHWA-RD-99-036 4. Title and Subtitle 5. Report Date INTELLIGENT TRANSPORTATION SYSTEMS FIELD OPERATIONAL TEST November 1998 CROSS-CUTTING STUDY COMMERCIAL VEHICLE OPERATIONS - 6. Performing Organization Code ROADSIDE Booz•Allen & Hamilton Inc. 7. Author(s) 8. Performing Organization Report No. Paul Belella, Dave Millar, Sameer Sharma 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) Booz•Allen & Hamilton Inc. 8201 Greensboro Drive 11. Contract or Grant No. Suite 609 McLean, Virginia 22102 DTFH61-94-C-00207 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Cross-Cutting Study February 1994 - November 1998 U.S. Department of Transportation Federal Highways Administration 14. Sponsoring Agency Code Joint Program Office 400 Seventh Street, SW HVH-1 Washington, DC 20590 15. Supplementary Notes Contracting Officer’s Technical Representative (COTR) - Joe Peters, Room 3416 16. -

State Hazardous Materials Compliance Effectiveness Study Battelle
. Final Report STATE HAZARDOUS MATERIALS COMPLIANCE EFFECTIVENESS STUDY To Federal Motor Carrier Safety Administration U.S. Department of Transportation Washington, DC 20590 February 14, 2003 State Hazardous Materials Compliance Effectiveness Study Battelle Table of Contents Acknowledgements..........................................................................................................................1 1.0 Introduction..........................................................................................................................2 2.0 Review of State Hazardous Materials Transportation Compliance Programs.....................3 2.1 Review of FY 2001 MCSAP Commercial Vehicle Safety Plans ..................................3 2.2 Survey of State Hazardous Materials Compliance and Enforcement Programs............5 State Regulatory Authority ......................................................................................5 State Hazardous Materials Compliance Programs...................................................6 Resource Allocation...............................................................................................10 Specialized State Hazmat Safety Initiatives ..........................................................10 Education, Training, and Outreach ........................................................................10 Hazmat Transportation Security ............................................................................13 Overview of State Survey Findings .......................................................................14 -

Wyoming ITS/CVO Business Plan
Wyoming ITS/CVO Business Plan prepared for: The Wyoming Department of Transportation Highway Patrol Motor Carrier Division by Castle Rock Consultants December 1997 WYOMING ITS/CVO BUSINESS PLAN Executive Summary Commercial Vehicle Operations (CVO) in Wyoming are among the safest and most efficient in the United States. This Business Plan recognizes the successes of Wyoming CVO and proposes seven elements to keep Wyoming a trucking leader. The Plan recommends operations enhancements, including the use of Intelligent Transportation Systems (ITS). It was developed with the Highway Patrol Motor Carriers Division, the Motor Vehicle Services Office, the Federal Highway Administration (FHWA) Office of Motor Carriers (OMC), and the Wyoming Trucking Association (WTA). Wyoming’s ITS/CVO mission is to enhance CVO in and through the state of Wyoming with public and private partners to produce a safe and efficient transportation system. This mirrors the national mission. The goals of Wyoming’s ITS/CVO Business plan are: ! To give port of entry personnel more time to conduct vehicle and driver inspections; ! To reduce the paper, time and travel needed to fulfill the regulatory obligations for the state and motor carrier industry; ! To improve the efficiency and effectiveness of the screening process through ITS; ! To develop ITS/CVO applications that benefit the motor carrier industry; and ! To identify and employ ITS/CVO functions that meet the state’s needs and financial restrictions. One key to efficiency is to develop strong working relationships among the various agencies involved in CVO. Through previous efforts, the Wyoming Department of Transportation has already established these working relationships. The Motor Carrier Division and Motor Vehicle Services Office communicate on a daily basis and regularly share information. -

Special Notes Prepass Safety Pull-In Rates Changable Message Signs Florida Agricultural Inspection Facilities Introduction
Rev. 8/1/18 Score 99-100 75-89 50-74 90-92 97-98 95-96 93-94 1-49 Special Notes Changable Message Signs ISS Colorado PrePass equipped trucks should disregard electronic road signs. Drivers are to follow General (Dumont WB/EB, Ft. Collins SB, Lamar SB, Limon WB, 100% the signal given by the in-cab device. 10% 50% 25% 15% 5% 5% 5% Monument NB, Trinidad NB) PrePass Safety Pull-In Rates These ports have exits off the interstate before Arizona Nebraska you reach the port. If you take this exit, you must Ehrenberg EB I-10 All PrePass Sites 100% 100% 100% 100% 100% State Specific that Differ from General CA report to the port when you reenter the interstate, San Simon WB I-10 North Carolina even if you received a green light on your Sanders WB I-40 Charlotte SB transponder. Topock EB I-40 DE 2% North Carolina South Carolina Introduction Delaware Anderson NB Enrolled carriers are required to provide PrePass Middletown NB This document lists restricted cargo types for each 100% 100% 100% 100% KY with a photo image that is representative of the Wisconsin PrePass state. When approaching a PrePass facility, you Louisiana tractors (power units) in their fleet. If the image All PrePass Sites must pull in if your cargo satisfies any of the restricted is not in the system, drivers can expect to receive All PrePass Sites criteria listed for that state, even if you receive a green 10% 10% 75% 75% 50% 50% NC a red light directing them to pull into the weigh light on your transponder. -

Special Notes Changeable Message Signs Florida Agricultural Inspection Facilities Introduction Prepass Safety Pull-In Rates
Rev. 10/28/20 Special Notes Changeable Message Signs 3% 3% 7% WY Nearby Exits Drivers in PrePass equipped trucks should 0% disregard electronic road signs and follow NE CO: Dumont WB/EB, Ft. Collins SB, Lamar SB, the signal on the in-cab device. Bypass at Limon WB, Monument NB, Trinidad NB these sites is by separate approval only. NC 50% 50% 75% 75% IN: Richmond WB and MO: Joplin EB 10% 10% Arizona Nebraska These weigh stations have exits off the interstate Ehrenberg EB I-10 All PrePass Sites before reaching the site. If drivers take this exit, KY San Simon WB I-10 100% 100% 100% 100% they must report to the weigh station before North Carolina reentering the interstate, even if a green light Sanders WB I-40 Charlotte SB 2% Introduction appears on the PrePass transponder. Topock EB I-40 DE South Carolina This document lists restricted cargo types for each Delaware New Jersey and North Carolina Anderson NB CO PrePass state. When approaching a PrePass-equipped Middletown NB 10% 90=5% Enrolled carriers must provide PrePass with a 95=10% 97=25% weigh station, you must pull in if your cargo meets any photo image that represents the tractors (power Wisconsin of the restricted criteria listed for that state, even if you Louisiana units) in their fleet. Without an image in the All PrePass Sites State Specific that Differ from General CA 100% 100% 100% 100% receive a green light on your transponder. All PrePass Sites 100% system, drivers will receive a red light directing Carriers should keep this pamphlet in their vehicles as them to pull into the weigh station. -
Understanding Trade Associations and Government Organizations
Understanding Trade Associations and Government Organizations It’s been said that there are three types of jobs in Washington, D.C.: those with the federal government, those influencing the federal government, and the military. Indeed, stroll through D.C. or its suburbs - Arlington, Alexandria, Bethesda - and it seems every other building houses a trade association representing a profession or industry trying to influence the federal government. There are even trade associations representing state-level government and sectors of the military pleading their case to their federal counterparts. The same is true, if on a slightly less-intensive basis, in every state capital. Trade associations are the lobbyists and spokespeople for every business, profession or political interest. In trucking, multiple trade associations represent different segments of the industry, at the national and at the state levels. Other trade associations represent the state agencies which inspect trucks and enforce trucking regulations, collect its taxes or provide for the roads. Read any trucking-related news article and you will trip across their acronyms, including those of the federal and state agencies that are often the objects of trade association attention. In this whitepaper we take a look at: how trucking trade associations represent their members; how they are organized and funded; how they can assist individual fleets or drivers; what’s the function of each of these many associations, and more. UNDERSTANDING THE ALPHABET SOUP OF TRUCKING 2 Trucking Trade Association 101 A trade association is a business representing the common interests of its members. The trade association may represent its members through lobbying and influencing government to act in a manner that benefits its members. -
Service Coverage Maps
Service Coverage Maps Revised Sept 2020 AK A1 YT NT NU NL BC AB SK MB Toll Service Coverage QC ON PE WA NB 90 NE MT ME 5 ND 94 OR MN VT ID 94 NH 15 87 84 SD 75 WI NY MA 25 WY 90 MI 90 CT 96 RI 80 80 35 IA 90 PA NE NJ NV OH 80 15 MD UT IN 70 70 DE IL CO WV 64 5 70 70 CA 64 AK MO VA KS 75 KY 44 15 NC 40 35 40 TN 10 AZ OK 40 85 A1 NM AR 25 SC 95 30 59 GA 55 AL MS 20 20 75 TX 45 LA 65 35 10 10 10 95 PrePass Plus State/Province FL E-ZPass Network Additional Networks Delaware Massachusetts North Carolina California – FasTrak Kansas – K-TAG Delaware River and Bay Authority Massachusetts Turnpike Authority North Carolina Turnpike Authority Bay Area Toll Authority Kansas Turnpike Authority DELDOT New Hampshire Ohio South Bay Expressway Oklahoma – Pikepass Illinois New Hampshire DOT Ohio Turnpike Transportation Corridor Agencies Oklahoma Turnpike Authority Illinois Tollway New Jersey Pennsylvania Colorado - ExpressToll (coming soon) Texas – EZ TAG Indiana Atlantic City Expressway Delaware River Joint Toll Commission Indiana Toll Road E-470 and Northwest Parkway Harris County Toll Road Authority Burlington County Bridge Commission Pennsylvania Turnpike RiverLink* Delaware River Port Authority Texas – TollTag Rhode Island Florida – SunPass Kentucky Garden State Parkway Central Florida Expressway Authority North Texas Tollway Authority Kentucky Public Transportation New Jersey Turnpike Rhode Island Turnpike & Bridge Authority Florida’s Turnpike Enterprise Infrastructure Authority Texas – TxTag RiverLink* New York Miami Dade Expressway Authority MTA Bridges and Tunnels Virginia TxDOT Authorities Maine Virginia DOT Tampa Hillsborough Expressway New York State Bridge Authority Authority Maine Turnpike Authority Washington – Good To Go (coming soon) New York State Thruway Authority West Virginia Maryland Peace Bridge West Virginia Parkway Authority Washington State DOT Maryland Transportation Authority Port Authority of NY & NJ *RiverLink is responsible for three bridges in the Louisville, KY/Southern IN area: Abraham Lincoln Bridge, Lewis and Clark Bridge and John F. -
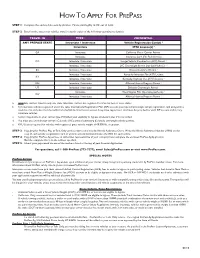
How to Apply for Prepass
HOW TO APPLY FOR PREPASS STEP 1: Complete the enclosed Account Application. Please print legibly and fill out all fields. STEP 2: Based on the states your vehicles travel in, attach copies of the following operating credentials: TRAVEL IN TYPE a CREDENTIAL ANY PREPASS STATE Intrastate / Interstate Vehicle Registration Card(s) b Interstate IFTA License(s) c CA Intrastate California Motor Carrier Permit c Intrastate Insurance Card (For Each Vehicle) CO Intrastate / Interstate Longer Vehicle Combination (LVC) Permit c Intrastate / Interstate LVC Overweight Permit (For Each Vehicle) c, d KS Intrastate / Interstate Kansas Combined Permit c Intrastate / Interstate Kentucky Intrastate Tax (KIT) License KY Intrastate / Interstate Kentucky Highway Use (KYU) License e OH Intrastate / Interstate Alliance Hazmat Program Permit c UT Intrastate / Interstate Divisible Overweight Permit c Intrastate West Virginia PSC Operating Authority c WV Intrastate / Interstate Alliance Hazmat Program Permit c a. Intrastate carriers travel in only one state. Interstate carriers are registered to travel in two or more states. b. For interstate vehicles registered under the same International Registration Plan (IRP) account, you may submit a single sample registration card along with a truck list that includes all of the fields from the Vehicle Information section. A separate registration card must be provided for each IRP account and for any intrastate vehicles. c. Submit if applicable to your carrier type. Will affect your eligibility to bypass at relevant sites if not provided. d. You must also provide your carrier’s Colorado LVC permit if submitting Colorado overweight vehicle permits. e. KYU License required for vehicles with registered gross vehicle weight of 60,000 lbs. -
Virtual Weigh Station, and Commercial Truck Parking Systems)
Produced by FHWA Office of Operations Support Contract DTFH61-11-D-00012 ITS Joint Program Office Research and Innovative Technology Administration U.S. Department of Transportation Notice This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. The U.S. Government is not endorsing any manufacturers, products, or services cited herein and any trade name that may appear in the work has been included only because it is essential to the contents of the work. Quality Assurance Statement The Federal Highway Administration (FHWA) provides high-quality information to serve Government, industry, and the public in a manner that promotes public understanding. Standards and policies are used to ensure and maximize the quality, objectivity, utility, and integrity of its information. FHWA periodically reviews quality issues and adjusts its programs and processes for continuous quality improvement. Sources: Cover images (clockwise from upper left): Truck border crossing (iStockphoto®); Highway with ITS (Cambridge Systematics, Inc.); E-ZPass (Cambridge Systematics, Inc.); Control room (iStockphoto®); Weigh station (EyeWire, Inc.); and OS/OW truck (Cambridge Systematics, Inc.). Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. FHWA-JPO-14-130 4. Title and Subtitle 5. Report Date Smart Roadside Initiative Gap Analysis – State of the Practice March 2014 6. Performing Organization Code 8. Performing Organization Report No. 7. Author(s) Steven Capecci, Mark Jensen, Brandon Rivenburg, Roger Schiller 10. Work Unit No. (TRAIS) 9. Performing Organization Name And Address Cambridge Systematics, Inc. -

Special Notes Changeable Message Signs Florida Agricultural Inspection Facilities Introduction Prepass Safety Pull-In Rates
Rev. 8/06/20 Special Notes Changeable Message Signs 3% 3% 7% WY Colorado PrePass equipped trucks should disregard 0% electronic road signs. Drivers are to follow NE (Dumont WB/EB, Ft. Collins SB, Lamar SB, Limon WB, the signal given by the in-cab device. Monument NB, Trinidad NB) NC 50% 50% 75% 75% 10% 10% These ports have exits off the interstate before you Arizona Nebraska reach the port. If you take this exit, you must report Ehrenberg EB I-10 All PrePass Sites KY to the port when you reenter the interstate, even if San Simon WB I-10 100% 100% 100% 100% North Carolina you received a green light on your transponder. Sanders WB I-40 Charlotte SB 2% Introduction Topock EB I-40 DE North Carolina South Carolina This document lists restricted cargo types for each Delaware Enrolled carriers are required to provide PrePass Anderson NB CO PrePass state. When approaching a PrePass facility, you Middletown NB 10% 90=5% with a photo image that is representative of the 95=10% 97=25% must pull in if your cargo satisfies any of the restricted Wisconsin tractors (power units) in their fleet. If the image Louisiana criteria listed for that state, even if you receive a green is not in the system, drivers can expect to receive All PrePass Sites State Specific that Differ from General CA 100% 100% 100% 100% All PrePass Sites 100% light on your transponder. a red light directing them to pull into the weigh Please keep this pamphlet in your vehicle as a quick station. -

Idaho Transpo Rtation De Partm
IDAHO TRANSPORTATION DEPARTMENT TRANSPORTATION IDAHO RP 248 State of Idaho Port of Entry Study RESEARCH REPORT RESEARCH By Brandon Rivenburg Brian Stewart Aldo Rivadeneyra Nicholas Vlahos Mark Jensen Cambridge Systematics, Inc. Barry Mason BGM Consulting LLC. Prepared for Idaho Transportation Department Research Program, Contracting Services Division of Engineering Services http://itd.idaho.gov/highways/research/ May 2016 Standard Disclaimer This document is disseminated under the sponsorship of the Idaho Transportation Department and the United States Department of Transportation in the interest of information exchange. The State of Idaho and the United States Government assume no liability of its contents or use thereof. The contents of this report reflect the view of the authors, who are responsible for the facts and accuracy of the data presented herein. The contents do not necessarily reflect the official policies of the Idaho Transportation Department or the United States Department of Transportation. The State of Idaho and the United States Government do not endorse products or manufacturers. Trademarks or manufacturers’ names appear herein only because they are considered essential to the object of this document. This report does not constitute a standard, specification or regulation. 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. FHWA-ID-16-248 4. Title and Subtitle 5. Report Date State of Idaho Port of Entry Study May 2016 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Brandon Rivenburg Brian Stewart Aldo Rivadeneyra Nicholas Vlahos Mark Jensen Barry Mason 9. Performing Organization Name and Address: 10. Work Unit No. (TRAIS) Cambridge Systematics, Inc.