Autonomous Vehicles
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Innovation in Ecosystem Business Models: an Application to Maas and Autonomous Vehicles in Urban Mobility System
Innovation in ecosystem business models : An application to MaaS and Autonomous vehicles in urban mobility system Rodrigo Gandia To cite this version: Rodrigo Gandia. Innovation in ecosystem business models : An application to MaaS and Autonomous vehicles in urban mobility system. Economics and Finance. Université Paris-Saclay; University of Lavras, UFLA (Brésil), 2020. English. NNT : 2020UPASC018. tel-02895349 HAL Id: tel-02895349 https://tel.archives-ouvertes.fr/tel-02895349 Submitted on 9 Jul 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Innovation in Ecosystem Business Models: An Application to MaaS and Autonomous Vehicles in Urban Mobility System Thèse de doctorat de l'université Paris-Saclay École doctorale n° 573 Interfaces : approches interdisciplinaires, fon- dements, applications et innovation (Interfaces) Spécialité de doctorat : Ingénierie des systèmes complexes Unité de recherche : Université Paris-Saclay, CentraleSupélec, Laboratoire Genie Industriel, 91190, Gif-sur-Yvette, France. Référent : CentraleSupélec Thèse présentée et -

Result Build a Self-Driving Network
SELF-DRIVING NETWORKS “LOOK, MA: NO HANDS” Kireeti Kompella CTO, Engineering Juniper Networks ITU FG Net2030 Geneva, Oct 2019 © 2019 Juniper Networks 1 Juniper Public VISION © 2019 Juniper Networks Juniper Public THE DARPA GRAND CHALLENGE BUILD A FULLY AUTONOMOUS GROUND VEHICLE IMPACT • Programmers, not drivers • No cops, lawyers, witnesses GOAL • Quadruple highway capacity Drive a pre-defined 240km course in the Mojave Desert along freeway I-15 • Glitches, insurance? • Ethical Self-Driving Cars? PRIZE POSSIBILITIES $1 Million RESULT 2004: Fail (best was less than 12km!) 2005: 5/23 completed it 2007: “URBAN CHALLENGE” Drive a 96km urban course following traffic regulations & dealing with other cars 6 cars completed this © 2019 Juniper Networks 3 Juniper Public GRAND RESULT: THE SELF-DRIVING CAR: (2009, 2014) No steering wheel, no pedals— a completely autonomous car Not just an incremental improvement This is a DISRUPTIVE change in automotive technology! © 2019 Juniper Networks 4 Juniper Public THE NETWORKING GRAND CHALLENGE BUILD A SELF-DRIVING NETWORK IMPACT • New skill sets required GOAL • New focus • BGP/IGP policies AI policy Self-Discover—Self-Configure—Self-Monitor—Self-Correct—Auto-Detect • Service config service design Customers—Auto-Provision—Self-Diagnose—Self-Optimize—Self-Report • Reactive proactive • Firewall rules anomaly detection RESULT Free up people to work at a higher-level: new service design and “mash-ups” POSSIBILITIES Agile, even anticipatory service creation Fast, intelligent response to security breaches CHALLENGE -
An Off-Road Autonomous Vehicle for DARPA's Grand Challenge
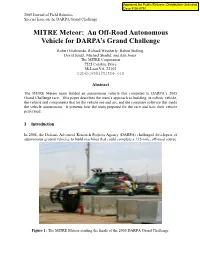
2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge MITRE Meteor: An Off-Road Autonomous Vehicle for DARPA’s Grand Challenge Robert Grabowski, Richard Weatherly, Robert Bolling, David Seidel, Michael Shadid, and Ann Jones. The MITRE Corporation 7525 Colshire Drive McLean VA, 22102 [email protected] Abstract The MITRE Meteor team fielded an autonomous vehicle that competed in DARPA’s 2005 Grand Challenge race. This paper describes the team’s approach to building its robotic vehicle, the vehicle and components that let the vehicle see and act, and the computer software that made the vehicle autonomous. It presents how the team prepared for the race and how their vehicle performed. 1 Introduction In 2004, the Defense Advanced Research Projects Agency (DARPA) challenged developers of autonomous ground vehicles to build machines that could complete a 132-mile, off-road course. Figure 1: The MITRE Meteor starting the finals of the 2005 DARPA Grand Challenge. 2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge 195 teams applied – only 23 qualified to compete. Qualification included demonstrations to DARPA and a ten-day National Qualifying Event (NQE) in California. The race took place on October 8 and 9, 2005 in the Mojave Desert over a course containing gravel roads, dirt paths, switchbacks, open desert, dry lakebeds, mountain passes, and tunnels. The MITRE Corporation decided to compete in the Grand Challenge in September 2004 by sponsoring the Meteor team. They believed that MITRE’s work programs and military sponsors would benefit from an understanding of the technologies that contribute to the DARPA Grand Challenge. -

Tesla Autopilot : Semi Autonomous Driving, an Uptick for Future Autonomy
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395 -0056 Volume: 03 Issue: 09 | Sep-2016 www.irjet.net p-ISSN: 2395-0072 Tesla Autopilot : Semi Autonomous Driving, an Uptick for Future Autonomy Shantanu Ingle1, Madhuri Phute2 1Department of E&TC, Pune Institute of Computer Technology, Pune, Maharashtra, India 2 Department of E&TC, Pune Institute of Computer Technology, Pune, Maharashtra, India ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - Manual driving has certainly changed the way response to traffic conditions. Once the driver arrives at the we travel and explore different parts of the globe, with total destination, Model S or Model X scans for a parking space human control and with human intuitions and previous and parallel parks on the driver's command[2]. In the new driving experiences. But manual control doesn’t ensure safety Autopilot, the instrument cluster’s new driver focused and zero fatalities in every possible driving condition. design shows the real-time information used by the car to Autonomous driving is the answer to that problem. However, intelligently determine the vehicle’s behavior in that artificial intelligence hasn't yet touched every aspect of moment relative to its surroundings[3]. Along with the technology. In this paper we present a brief overview about autopilot feature, the driving behavior of each Tesla car, how Tesla Motor’s semi autonomous driving technology called while navigating through different road conditions, is shared Tesla Autopilot is changing the way we navigate and transport to its central server. Based on machine learning and Tesla by incorporating state of the art current artificial intelligence design engineer recommendations, a new feature update is and hardware technology, and enhancing the next generation developed and launched to every other Tesla car on planet. -

Post-Pandemic Reflections: Future Mobility COVID-19’S Potential Impact on the New Mobility Ecosystem
THEMATIC INSIGHTS Post-Pandemic Reflections: Future Mobility COVID-19’s potential impact on the new mobility ecosystem msci.com msci.com 1 Contents 04 Mobility-as-a-Service and the COVID-19 shock 06 Growing Pains in the Future Mobility Market 16 Mobility Services: Expansion and Acceleration 18 COVID-19: A Catalyst for Autonomous Delivery? 2 msci.com msci.com 3 Future Mobility A growing database collated by Neckermann Strategic Advisors has over Mobility-as- 700 public and private companies involved with different elements of the autonomous Mobility-as-a-Service (MaaS) value chain. a-Service A list that doesn’t yet include all the producers of electric, two-wheeled and public transport that contribute to the full and the mobility ecosystem. In the 1910s, the automotive industry was COVID-19 shock vast, and the rising tide was lifting every boat, albeit not profitably. However, by the time the Roaring Twenties came to an end in Even prior to the COVID-19 crisis, we discussed in our first Thematic 1929, the number of US auto manufacturers Insight1 how the world might be in the midst of the largest transformation had already fallen to 44, only to consolidate in mobility since the advent of the automobile some 120 years ago. Will much further after the Great Depression. the current pandemic prove to be a system shock that accelerates the It is, of course, tempting to see a parallel demise of inflexible and unprofitable business models and acts as a to the last five years in mobility. Just prior catalyst for the growth of more digital and service-oriented businesses in to the COVID-19 crisis, there were initial the mobility space? How might industry-wide headwinds affect the new signs of stress in this tapestry of privately- business models and technologies at least in the short-term? funded companies in the Future Mobility New industries naturally go through a series of iterations before becoming ecosystem. -

A Survey of Autonomous Driving: Common Practices and Emerging Technologies
Accepted March 22, 2020 Digital Object Identifier 10.1109/ACCESS.2020.2983149 A Survey of Autonomous Driving: Common Practices and Emerging Technologies EKIM YURTSEVER1, (Member, IEEE), JACOB LAMBERT 1, ALEXANDER CARBALLO 1, (Member, IEEE), AND KAZUYA TAKEDA 1, 2, (Senior Member, IEEE) 1Nagoya University, Furo-cho, Nagoya, 464-8603, Japan 2Tier4 Inc. Nagoya, Japan Corresponding author: Ekim Yurtsever (e-mail: [email protected]). ABSTRACT Automated driving systems (ADSs) promise a safe, comfortable and efficient driving experience. However, fatalities involving vehicles equipped with ADSs are on the rise. The full potential of ADSs cannot be realized unless the robustness of state-of-the-art is improved further. This paper discusses unsolved problems and surveys the technical aspect of automated driving. Studies regarding present challenges, high- level system architectures, emerging methodologies and core functions including localization, mapping, perception, planning, and human machine interfaces, were thoroughly reviewed. Furthermore, many state- of-the-art algorithms were implemented and compared on our own platform in a real-world driving setting. The paper concludes with an overview of available datasets and tools for ADS development. INDEX TERMS Autonomous Vehicles, Control, Robotics, Automation, Intelligent Vehicles, Intelligent Transportation Systems I. INTRODUCTION necessary here. CCORDING to a recent technical report by the Eureka Project PROMETHEUS [11] was carried out in A National Highway Traffic Safety Administration Europe between 1987-1995, and it was one of the earliest (NHTSA), 94% of road accidents are caused by human major automated driving studies. The project led to the errors [1]. Against this backdrop, Automated Driving Sys- development of VITA II by Daimler-Benz, which succeeded tems (ADSs) are being developed with the promise of in automatically driving on highways [12]. -

Autonomous Vehicles
10/27/2017 Looming on the Horizon: Autonomous Vehicles Jim Hedlund Highway Safety North MN Toward Zero Deaths Conference October 26, 2017 St. Paul, MN In the next 25 minutes • AV 101 . What’s an autonomous vehicle (AV)? . What’s on the road now? . What’s coming and when? . What does the public think about AVs? . What are current state laws on AVs? • Traffic safety issues for states . AV testing . AV operations . What should states do . What should national organizations do 2 1 10/27/2017 Report released Feb. 2, 2017 3 Autonomous = self-driving, right? So what’s the challenge? • When all vehicles are autonomous: . The passenger economy: transportation as a service . No crashes (at least none due to driver error – about 94% currently) • And it’s coming soon . 26 states and DC with AV legislation or executive orders (and AVs probably can operate in most states without law changes) 4 2 10/27/2017 NCSL October 2017 www.ghsa.org @GHSAHQ 5 But … • It’s far more complicated than that 6 3 10/27/2017 What’s an AV? • Level 0: no automation, driver in complete control • Level 1: driver assistance . Cruise control or lane position, driver monitors at all times • Level 2: occasional self-driving . Control both speed and lane position in limited situations, like Interstates; driver monitors at all times ************** • Level 3: limited self-driving in some situations, like Interstates . Vehicle in full control, informs when driver must take control • Level 4: full self-driving under certain conditions . Vehicle in full control for entire trip, such as urban ride-sharing • Level 5: full self-driving at all times 7 What’s on the road now? • Level 1 available for many years . -
Impacts of Automated Vehicles and Shared Mobility on Transit and Partnership Opportunities
NCHRP Project 20-113F Preparing for Automated Vehicles and Shared Mobility: State-of-the-Research Topical Paper #7 IMPACTS OF AUTOMATED VEHICLES AND SHARED MOBILITY ON TRANSIT AND PARTNERSHIP OPPORTUNITIES September 21, 2020 Transportation Research Board 500 5th Street NW Washington, DC 20001 www.trb.org Prepared by: For: The views expressed in this document are those of the author(s), and are intended to help inform and stimulate discussion. The document is not a report of the National Academies of Sciences, Engineering, and Medicine and has not been subjected to its review procedures. 1 Introduction 1.1. Background In coordination with the National Cooperative Highway Research Program (NCHRP), the TRB Forum on Preparing for Automated Vehicles and Shared Mobility (Forum) has developed nine (9) Topical Papers to support the work of the Forum (Project). The mission of the Forum is to bring together public, private, and research organizations to share perspectives on critical issues for deploying AVs and shared mobility. This includes discussing, identifying, and facilitating fact-based research needed to deploy these mobility focused innovations and inform policy to meet long-term goals, including increasing safety, reducing congestion, enhancing accessibility, increasing environmental and energy sustainability, and supporting economic development and equity. IMPACTS OF AUTOMATED VEHICLES AND SHARED MOBILITY ON TRANSIT AND PARTNERSHIP OPPORTUNITIES PAGE 2 The Topical Areas covered as part of the Project include the following: The goals -

SAE International® PROGRESS in TECHNOLOGY SERIES Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015
Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Connectivity and the Mobility Industry Edited by Dr. Andrew Brown, Jr. SAE International® PROGRESS IN TECHNOLOGY SERIES Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Connectivity and the Mobility Industry Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Other SAE books of interest: Green Technologies and the Mobility Industry By Dr. Andrew Brown, Jr. (Product Code: PT-146) Active Safety and the Mobility Industry By Dr. Andrew Brown, Jr. (Product Code: PT-147) Automotive 2030 – North America By Bruce Morey (Product Code: T-127) Multiplexed Networks for Embedded Systems By Dominique Paret (Product Code: R-385) For more information or to order a book, contact SAE International at 400 Commonwealth Drive, Warrendale, PA 15096-0001, USA phone 877-606-7323 (U.S. and Canada) or 724-776-4970 (outside U.S. and Canada); fax 724-776-0790; e-mail [email protected]; website http://store.sae.org. Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 Connectivity and the Mobility Industry By Dr. Andrew Brown, Jr. Warrendale, Pennsylvania, USA Copyright © 2011 SAE International. eISBN: 978-0-7680-7461-1 Downloaded from SAE International by Eric Anderson, Thursday, September 10, 2015 400 Commonwealth Drive Warrendale, PA 15096-0001 USA E-mail: [email protected] Phone: 877-606-7323 (inside USA and Canada) 724-776-4970 (outside USA) Fax: 724-776-0790 Copyright © 2011 SAE International. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, distributed, or transmitted, in any form or by any means without the prior written permission of SAE. -

The Rise of Mobility As a Service Reshaping How Urbanites Get Around
Issue 20 | 2017 Complimentary article reprint The rise of mobility as a service Reshaping how urbanites get around By Warwick Goodall, Tiffany Dovey Fishman, Justine Bornstein, and Brett Bonthron Illustration by Traci Daberko Breakthroughs in self-driving cars are only the beginning: The entire way we travel from point A to point B is changing, creating a new ecosystem of personal mobility. The shift will likely affect far more than transportation and automakers—industries from insurance and health care to energy and media should reconsider how they create value in this emerging environment. Deloitte offers a suite of services to help clients tackle Future of Mobility- related challenges, including setting strategic direction, planning operating models, and implementing new operations and capabilities. Our wide array of expertise allows us to become a true partner throughout an organization’s comprehensive, multidimensional journey of transformation. About Deloitte Deloitte refers to one or more of Deloitte Touche Tohmatsu Limited, a UK private company limited by guarantee, and its network of member firms, each of which is a legally separate and independent entity. Please see http://www/deloitte.com/about for a detailed description of the legal structure of Deloitte Touche Tohmatsu Limited and its member firms. Please see http://www.deloitte.com/us/about for a detailed description of the legal structure of the US member firms of Deloitte Touche Tohmatsu Limited and their respective subsidiaries. Certain services may not be available to attest clients under the rules and regulations of public accounting. Deloitte provides audit, tax, consulting, and financial advisory services to public and private clients spanning multiple industries. -

3.17.2020 Request for Feedback on AV Legislation Staff Draft Sections
TO: Majority and Minority Staff of Senate Commerce, Science, and Transportation Committee and House Energy and Commerce Committee FROM: Advocates for Highway and Auto Safety, Consumer Federation of America, KidsAndCars.org, and Trauma Foundation DATE: March 17, 2020 RE: Request for Input on Draft Autonomous Vehicle Legislative Language Introduction Thank you for the opportunity to provide feedback to the final seven sections of potential autonomous vehicle (AV) legislation. Please note that in the attached redlined draft legislative language, there may be additional recommendations not necessarily included in this memo. Similarly, in this memo we detail concerns which may not be directly attached to the redlined legislative language as well as provide justifications for changes we did redline. As you have announced that you have completed the distribution of draft legislative sections, we would like to reiterate that stakeholder feedback should be shared publicly to provide transparency and the opportunity for collaboration as well as the identification of shared policy priorities in order to forge a path forward on the Nation’s first AV law. Because this law will have long-lasting and wide-reaching impacts on safety for all road users, infrastructure, mobility, accessibility, the environment and land use, public transit, first responders and law enforcement, it must be done with robust discussion, debate and deliberation. We would like to begin by reiterating our safety priorities and policy positions that are also included in more detail in our previous memos. They remain relevant and vital in developing any legislation on AVs. In sum, they are: • Our Nation’s first law on AVs must ensure the safe development and deployment of all AVs, including partially automated vehicles whether for sale or use as a pay-for mobility option. -

In the Court of Chancery of the State of Delaware
EFiled: Sep 06 2016 07:12PM EDT Transaction ID 59520160 Case No. 12723- IN THE COURT OF CHANCERY OF THE STATE OF DELAWARE ELLEN PRASINOS, derivatively on behalf ) TESLA MOTORS, INC., ) ) Plaintiff, ) ) vs. ) ) C.A. No. ELON MUSK, BRAD W. BUSS, ROBYN ) M. DENHOLM, IRA EHRENPREIS, ) ANTONIO J. GRACIAS, STEPHEN T. ) JURVETSON, KIMBAL MUSK, ) LYNDON RIVE, PETER RIVE, JOHN H. ) N. FISHER, JEFFREY B. STRAUBEL, D ) SUBSIDIARY, INC., AND SOLARCITY ) CORPORATION, ) ) Defendants, ) ) -and- ) ) TESLA MOTORS, INC., a Delaware ) Corporation, ) ) Nominal Defendant ) VERIFIED STOCKHOLDER DERIVATIVE COMPLAINT Plaintiff Ellen Prasinos (“Plaintiff”), by and through her undersigned counsel, assert this action derivatively on behalf of Tesla Motors, Inc. (“Telsa” or the “Company”) against defendants Elon Musk, Brad W. Buss, Robyn M. Denholm, Ira Ehrenpreis, Antonio J. Gracias, Stephen T. Jurvetson and Kimbal Musk (collectively, the “Board” or the “Director Defendants”), along with Lyndon Rive, Peter Rive, John H. N. Fisher, J.B. Straubel, D Subsidiary, Inc., and 1 ME1 23271632v.1 SolarCity Corporation (“SolarCity”). Plaintiff alleges, upon information and belief based upon, inter alia , the investigation made by her attorneys, except as to those allegations that pertain to the Plaintiff herself, which are alleged upon knowledge, as follows: SUMMARY OF THE ACTION 1. Elon Musk (“Musk”), a smart and charismatic businessman, wants to save the world by “making life multi-planetary”, and “expedit[ing] the move from a mine-and-burn hydrocarbon economy towards a solar electric economy.” While Musk’s goal to save the world may be admirable, he uses unethical and illegal tactics to achieve that goal, especially when his personal financial interests and legacy are at stake.