A Survey of Autonomous Driving: Common Practices and Emerging Technologies
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rapport AI Internationale Verkenning Van De Sociaaleconomische
RAPPORT ARTIFICIËLE INTELLIGENTIE INTERNATIONALE VERKENNING VAN DE SOCIAAL-ECONOMISCHE IMPACT STAND VAN ZAKEN EIND OKTOBER 2020 5. AI als een octopus met tentakels in diverse sectoren: een illustratie Artificiële intelligentie: sociaal-economische verkenning 5 AI als een octopus met tentakels in diverse sectoren: een illustratie 5.1 General purpose: Duurzame ontwikkeling (SDG’s) AI is een technologie voor algemene doeleinden en kan worden aangewend om het algemeen maatschappelijk welzijn te bevorderen.28 De bijdrage van AI in het realiseren van de VN- doelstellingen voor duurzame ontwikkeling (SDG's) op het vlak van onder meer onderwijs, gezondheidszorg, vervoer, landbouw en duurzame steden, vormt hiervan het beste bewijs. Veel openbare en particuliere organisaties, waaronder de Wereldbank, een aantal agentschappen van de Verenigde Naties en de OESO, willen AI benutten om stappen vooruit te zetten op de weg naar de SDG's. Uit de database van McKinsey Global Institute29 met AI-toepassingen blijkt dat AI ingezet kan worden voor elk van de 17 duurzame ontwikkelingsdoelstellingen. Onderstaande figuur geeft het aantal AI-use cases (toepassingen) in de database van MGI aan die elk van de SDG's van de VN kunnen ondersteunen. Figuur 1: AI use cases voor de ondersteuning van de SDG’s30 28 Steels, L., Berendt, B., Pizurica, A., Van Dyck, D., Vandewalle,J. Artificiële intelligentie. Naar een vierde industriële revolutie?, Standpunt nr. 53 KVAB, 2017. 29 McKinsey Global Institute, notes from the AI frontier applying AI for social good, Discussion paper, December 2018. Chui, M., Chung, R., van Heteren, A., Using AI to help achieve sustainable development goals, UNDP, January 21, 2019 30 Noot McKinsey: This chart reflects the number and distribution of use cases and should not be read as a comprehensive evaluation of AI potential for each SDG; if an SDG has a low number of cases, that is a reflection of our library rather than of AI applicability to that SDG. -

Result Build a Self-Driving Network
SELF-DRIVING NETWORKS “LOOK, MA: NO HANDS” Kireeti Kompella CTO, Engineering Juniper Networks ITU FG Net2030 Geneva, Oct 2019 © 2019 Juniper Networks 1 Juniper Public VISION © 2019 Juniper Networks Juniper Public THE DARPA GRAND CHALLENGE BUILD A FULLY AUTONOMOUS GROUND VEHICLE IMPACT • Programmers, not drivers • No cops, lawyers, witnesses GOAL • Quadruple highway capacity Drive a pre-defined 240km course in the Mojave Desert along freeway I-15 • Glitches, insurance? • Ethical Self-Driving Cars? PRIZE POSSIBILITIES $1 Million RESULT 2004: Fail (best was less than 12km!) 2005: 5/23 completed it 2007: “URBAN CHALLENGE” Drive a 96km urban course following traffic regulations & dealing with other cars 6 cars completed this © 2019 Juniper Networks 3 Juniper Public GRAND RESULT: THE SELF-DRIVING CAR: (2009, 2014) No steering wheel, no pedals— a completely autonomous car Not just an incremental improvement This is a DISRUPTIVE change in automotive technology! © 2019 Juniper Networks 4 Juniper Public THE NETWORKING GRAND CHALLENGE BUILD A SELF-DRIVING NETWORK IMPACT • New skill sets required GOAL • New focus • BGP/IGP policies AI policy Self-Discover—Self-Configure—Self-Monitor—Self-Correct—Auto-Detect • Service config service design Customers—Auto-Provision—Self-Diagnose—Self-Optimize—Self-Report • Reactive proactive • Firewall rules anomaly detection RESULT Free up people to work at a higher-level: new service design and “mash-ups” POSSIBILITIES Agile, even anticipatory service creation Fast, intelligent response to security breaches CHALLENGE -

Synthesizing Images of Humans in Unseen Poses
Synthesizing Images of Humans in Unseen Poses Guha Balakrishnan Amy Zhao Adrian V. Dalca Fredo Durand MIT MIT MIT and MGH MIT [email protected] [email protected] [email protected] [email protected] John Guttag MIT [email protected] Abstract We address the computational problem of novel human pose synthesis. Given an image of a person and a desired pose, we produce a depiction of that person in that pose, re- taining the appearance of both the person and background. We present a modular generative neural network that syn- Source Image Target Pose Synthesized Image thesizes unseen poses using training pairs of images and poses taken from human action videos. Our network sepa- Figure 1. Our method takes an input image along with a desired target pose, and automatically synthesizes a new image depicting rates a scene into different body part and background lay- the person in that pose. We retain the person’s appearance as well ers, moves body parts to new locations and refines their as filling in appropriate background textures. appearances, and composites the new foreground with a hole-filled background. These subtasks, implemented with separate modules, are trained jointly using only a single part details consistent with the new pose. Differences in target image as a supervised label. We use an adversarial poses can cause complex changes in the image space, in- discriminator to force our network to synthesize realistic volving several moving parts and self-occlusions. Subtle details conditioned on pose. We demonstrate image syn- details such as shading and edges should perceptually agree thesis results on three action classes: golf, yoga/workouts with the body’s configuration. -

Appearance-Based Gaze Estimation with Deep Learning: a Review and Benchmark
MANUSCRIPT, APRIL 2021 1 Appearance-based Gaze Estimation With Deep Learning: A Review and Benchmark Yihua Cheng1, Haofei Wang2, Yiwei Bao1, Feng Lu1,2,* 1State Key Laboratory of Virtual Reality Technology and Systems, SCSE, Beihang University, China. 2Peng Cheng Laboratory, Shenzhen, China. fyihua c, baoyiwei, [email protected], [email protected] Abstract—Gaze estimation reveals where a person is looking. It is an important clue for understanding human intention. The Deep learning algorithms recent development of deep learning has revolutionized many computer vision tasks, the appearance-based gaze estimation is no exception. However, it lacks a guideline for designing deep learn- ing algorithms for gaze estimation tasks. In this paper, we present a comprehensive review of the appearance-based gaze estimation methods with deep learning. We summarize the processing Chip pipeline and discuss these methods from four perspectives: deep feature extraction, deep neural network architecture design, personal calibration as well as device and platform. Since the Platform Calibration Feature Model data pre-processing and post-processing methods are crucial for gaze estimation, we also survey face/eye detection method, data rectification method, 2D/3D gaze conversion method, and gaze origin conversion method. To fairly compare the performance of various gaze estimation approaches, we characterize all the Fig. 1. Deep learning based gaze estimation relies on simple devices and publicly available gaze estimation datasets and collect the code of complex deep learning algorithms to estimate human gaze. It usually uses typical gaze estimation algorithms. We implement these codes and off-the-shelf cameras to capture facial appearance, and employs deep learning set up a benchmark of converting the results of different methods algorithms to regress gaze from the appearance. -
An Off-Road Autonomous Vehicle for DARPA's Grand Challenge
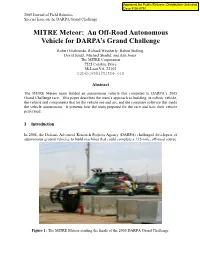
2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge MITRE Meteor: An Off-Road Autonomous Vehicle for DARPA’s Grand Challenge Robert Grabowski, Richard Weatherly, Robert Bolling, David Seidel, Michael Shadid, and Ann Jones. The MITRE Corporation 7525 Colshire Drive McLean VA, 22102 [email protected] Abstract The MITRE Meteor team fielded an autonomous vehicle that competed in DARPA’s 2005 Grand Challenge race. This paper describes the team’s approach to building its robotic vehicle, the vehicle and components that let the vehicle see and act, and the computer software that made the vehicle autonomous. It presents how the team prepared for the race and how their vehicle performed. 1 Introduction In 2004, the Defense Advanced Research Projects Agency (DARPA) challenged developers of autonomous ground vehicles to build machines that could complete a 132-mile, off-road course. Figure 1: The MITRE Meteor starting the finals of the 2005 DARPA Grand Challenge. 2005 Journal of Field Robotics Special Issue on the DARPA Grand Challenge 195 teams applied – only 23 qualified to compete. Qualification included demonstrations to DARPA and a ten-day National Qualifying Event (NQE) in California. The race took place on October 8 and 9, 2005 in the Mojave Desert over a course containing gravel roads, dirt paths, switchbacks, open desert, dry lakebeds, mountain passes, and tunnels. The MITRE Corporation decided to compete in the Grand Challenge in September 2004 by sponsoring the Meteor team. They believed that MITRE’s work programs and military sponsors would benefit from an understanding of the technologies that contribute to the DARPA Grand Challenge. -

Through the Eyes of the Beholder: Simulated Eye-Movement Experience (“SEE”) Modulates Valence Bias in Response to Emotional Ambiguity
Emotion © 2018 American Psychological Association 2018, Vol. 18, No. 8, 1122–1127 1528-3542/18/$12.00 http://dx.doi.org/10.1037/emo0000421 BRIEF REPORT Through the Eyes of the Beholder: Simulated Eye-Movement Experience (“SEE”) Modulates Valence Bias in Response to Emotional Ambiguity Maital Neta and Michael D. Dodd University of Nebraska—Lincoln Although some facial expressions provide clear information about people’s emotions and intentions (happy, angry), others (surprise) are ambiguous because they can signal both positive (e.g., surprise party) and negative outcomes (e.g., witnessing an accident). Without a clarifying context, surprise is interpreted as positive by some and negative by others, and this valence bias is stable across time. When compared to fearful expressions, which are consistently rated as negative, surprise and fear share similar morphological features (e.g., widened eyes) primarily in the upper part of the face. Recently, we demonstrated that the valence bias was associated with a specific pattern of eye movements (positive bias associated with faster fixation to the lower part of the face). In this follow-up, we identified two participants from our previous study who had the most positive and most negative valence bias. We used their eye movements to create a moving window such that new participants viewed faces through the eyes of one our previous participants (subjects saw only the areas of the face that were directly fixated by the original participants in the exact order they were fixated; i.e., Simulated Eye-movement Experience). The input provided by these windows modulated the valence ratings of surprise, but not fear faces. -

Modulation of Saccadic Curvature by Spatial Memory and Associative Learning
Modulation of Saccadic Curvature by Spatial Memory and Associative Learning Dissertation zur Erlangung des Doktorgrades der Naturwissenschaften (Dr. rer. nat.) dem Fachbereich Psychologie der Philipps-Universität Marburg vorgelegt von Stephan König aus Arnsberg Marburg/Lahn, Oktober 2010 Vom Fachbereich Psychologie der Philipps-Universität Marburg als Dissertation angenommen am _________________ Erstgutachter: Prof. Dr. Harald Lachnit, Philipps Universität Marburg Zweitgutachter: Prof. Dr. John Pearce, Cardiff University Tag der mündlichen Prüfung am: 27.10.2010 Acknowledgment I would like to thank Prof. Dr. Harald Lachnit for providing the opportunity for my work on this thesis. I would like to thank Prof. Dr. Harald Lachnit, Dr. Anja Lotz and Prof. Dr. John Pearce for proofreading, reviewing and providing many valuable suggestions during the process of writing. I would like to thank Peter Nauroth, Sarah Keller, Gloria-Mona Knospe, Sara Lucke and Anja Riesner who helped in recruiting participants as well as collecting data. I would like to thank the Deutsche Forschungsgemeinschaft for their support through the graduate program NeuroAct (DFG 885/1), and project Blickbewegungen als Indikatoren assoziativen Lernens (DFG LA 564/20-1) granted to Prof. Dr. Harald Lachnit. Summary The way the eye travels during a saccade typically does not follow a straight line but rather shows some curvature instead. Converging empirical evidence has demonstrated that curvature results from conflicting saccade goals when multiple stimuli in the visual periphery compete for selection as the saccade target (Van der Stigchel, Meeter, & Theeuwes, 2006). Curvature away from a competing stimulus has been proposed to result from the inhibitory deselection of the motor program representing the saccade towards that stimulus (Sheliga, Riggio, & Rizzolatti, 1994; Tipper, Howard, & Houghton, 2000). -

Memristor-Based Approximated Computation
Memristor-based Approximated Computation Boxun Li1, Yi Shan1, Miao Hu2, Yu Wang1, Yiran Chen2, Huazhong Yang1 1Dept. of E.E., TNList, Tsinghua University, Beijing, China 2Dept. of E.C.E., University of Pittsburgh, Pittsburgh, USA 1 Email: [email protected] Abstract—The cessation of Moore’s Law has limited further architectures, which not only provide a promising hardware improvements in power efficiency. In recent years, the physical solution to neuromorphic system but also help drastically close realization of the memristor has demonstrated a promising the gap of power efficiency between computing systems and solution to ultra-integrated hardware realization of neural net- works, which can be leveraged for better performance and the brain. The memristor is one of those promising devices. power efficiency gains. In this work, we introduce a power The memristor is able to support a large number of signal efficient framework for approximated computations by taking connections within a small footprint by taking the advantage advantage of the memristor-based multilayer neural networks. of the ultra-integration density [7]. And most importantly, A programmable memristor approximated computation unit the nonvolatile feature that the state of the memristor could (Memristor ACU) is introduced first to accelerate approximated computation and a memristor-based approximated computation be tuned by the current passing through itself makes the framework with scalability is proposed on top of the Memristor memristor a potential, perhaps even the best, device to realize ACU. We also introduce a parameter configuration algorithm of neuromorphic computing systems with picojoule level energy the Memristor ACU and a feedback state tuning circuit to pro- consumption [8], [9]. -

A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges
sensors Review A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges M. Nadeem Ahangar 1, Qasim Z. Ahmed 1,*, Fahd A. Khan 2 and Maryam Hafeez 1 1 School of Computing and Engineering, University of Huddersfield, Huddersfield HD1 3DH, UK; [email protected] (M.N.A.); [email protected] (M.H.) 2 School of Electrical Engineering and Computer Science, National University of Sciences and Technology, Islamabad 44000, Pakistan; [email protected] * Correspondence: [email protected] Abstract: The Department of Transport in the United Kingdom recorded 25,080 motor vehicle fatali- ties in 2019. This situation stresses the need for an intelligent transport system (ITS) that improves road safety and security by avoiding human errors with the use of autonomous vehicles (AVs). There- fore, this survey discusses the current development of two main components of an ITS: (1) gathering of AVs surrounding data using sensors; and (2) enabling vehicular communication technologies. First, the paper discusses various sensors and their role in AVs. Then, various communication tech- nologies for AVs to facilitate vehicle to everything (V2X) communication are discussed. Based on the transmission range, these technologies are grouped into three main categories: long-range, medium- range and short-range. The short-range group presents the development of Bluetooth, ZigBee and ultra-wide band communication for AVs. The medium-range examines the properties of dedicated short-range communications (DSRC). Finally, the long-range group presents the cellular-vehicle to everything (C-V2X) and 5G-new radio (5G-NR). An important characteristic which differentiates each category and its suitable application is latency. -
CSE 152: Computer Vision Manmohan Chandraker
CSE 152: Computer Vision Manmohan Chandraker Lecture 15: Optimization in CNNs Recap Engineered against learned features Label Convolutional filters are trained in a Dense supervised manner by back-propagating classification error Dense Dense Convolution + pool Label Convolution + pool Classifier Convolution + pool Pooling Convolution + pool Feature extraction Convolution + pool Image Image Jia-Bin Huang and Derek Hoiem, UIUC Two-layer perceptron network Slide credit: Pieter Abeel and Dan Klein Neural networks Non-linearity Activation functions Multi-layer neural network From fully connected to convolutional networks next layer image Convolutional layer Slide: Lazebnik Spatial filtering is convolution Convolutional Neural Networks [Slides credit: Efstratios Gavves] 2D spatial filters Filters over the whole image Weight sharing Insight: Images have similar features at various spatial locations! Key operations in a CNN Feature maps Spatial pooling Non-linearity Convolution (Learned) . Input Image Input Feature Map Source: R. Fergus, Y. LeCun Slide: Lazebnik Convolution as a feature extractor Key operations in a CNN Feature maps Rectified Linear Unit (ReLU) Spatial pooling Non-linearity Convolution (Learned) Input Image Source: R. Fergus, Y. LeCun Slide: Lazebnik Key operations in a CNN Feature maps Spatial pooling Max Non-linearity Convolution (Learned) Input Image Source: R. Fergus, Y. LeCun Slide: Lazebnik Pooling operations • Aggregate multiple values into a single value • Invariance to small transformations • Keep only most important information for next layer • Reduces the size of the next layer • Fewer parameters, faster computations • Observe larger receptive field in next layer • Hierarchically extract more abstract features Key operations in a CNN Feature maps Spatial pooling Non-linearity Convolution (Learned) . Input Image Input Feature Map Source: R. -

1 Convolution
CS1114 Section 6: Convolution February 27th, 2013 1 Convolution Convolution is an important operation in signal and image processing. Convolution op- erates on two signals (in 1D) or two images (in 2D): you can think of one as the \input" signal (or image), and the other (called the kernel) as a “filter” on the input image, pro- ducing an output image (so convolution takes two images as input and produces a third as output). Convolution is an incredibly important concept in many areas of math and engineering (including computer vision, as we'll see later). Definition. Let's start with 1D convolution (a 1D \image," is also known as a signal, and can be represented by a regular 1D vector in Matlab). Let's call our input vector f and our kernel g, and say that f has length n, and g has length m. The convolution f ∗ g of f and g is defined as: m X (f ∗ g)(i) = g(j) · f(i − j + m=2) j=1 One way to think of this operation is that we're sliding the kernel over the input image. For each position of the kernel, we multiply the overlapping values of the kernel and image together, and add up the results. This sum of products will be the value of the output image at the point in the input image where the kernel is centered. Let's look at a simple example. Suppose our input 1D image is: f = 10 50 60 10 20 40 30 and our kernel is: g = 1=3 1=3 1=3 Let's call the output image h. -

Passenger Response to Driving Style in an Autonomous Vehicle
Passenger Response to Driving Style in an Autonomous Vehicle by Nicole Belinda Dillen A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of Mathematics in Computer Science Waterloo, Ontario, Canada, 2019 c Nicole Dillen 2019 I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. ii Abstract Despite rapid advancements in automated driving systems (ADS), current HMI research tends to focus more on the safety driver in lower level vehicles. That said, the future of automated driving lies in higher level systems that do not always require a safety driver to be present. However, passengers might not fully trust the capability of the ADS in the absence of a safety driver. Furthermore, while an ADS might have a specific set of parameters for its driving profile, passengers might have different driving preferences, some more defensive than others. Taking these preferences into consideration is, therefore, an important issue which can only be accomplished by understanding what makes a passenger uncomfortable or anxious. In order to tackle this issue, we ran a human study in a real-world autonomous vehicle. Various driving profile parameters were manipulated and tested in a scenario consisting of four different events. Physiological measurements were also collected along with self- report scores, and the combined data was analyzed using Linear Mixed-Effects Models. The magnitude of a response was found to be situation dependent: the presence and proximity of a lead vehicle significantly moderated the effect of other parameters.