Videographic and GPS Techniques for Monitoring Active Glacial Surge: Bering Glacier, Alaska
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Insar Observations of the 1993-95 Bering Glacier (Alaska, U. S. A
Journal ofGlaciology, Vo l. 48, No.162,2002 InSAR observations of the 1993^95 Bering Glacier (Alaska, U.S.A.)surge and a surge hypothesis Dennis R. FATLAND,1 Craig S. LINGLE2 1Vexcel Corporation, Boulder,Colorado 80301-3242, U.S.A. E-mail: [email protected] 2Geophysical Institute, University ofAlaska Fairbanks, Fairbanks, Alaska 99775-7320, U.S.A. ABSTRACT. Time-varying accelerations were observed on Bagley Icefield during the 1993^95 surge of Bering Glacier, Alaska, U.S.A., using repeat-pass synthetic aperture radar interferometry. Observations were from datasets acquired during winter 1991/92 (pre-surge), winter 1993/94 (during the surge) and winter 1995/96 (post-surge).The surge is shown to have extended 110km up the icefield from Bering Glacier to within 15km or less of the flow divide. Acceleration and step-like velocity profiles are strongly associated with an along-glacier series of central phase bull's-eyes with diameters of 0.5^4 km.These bull's-eyes are interpreted to represent glacier surface rise/fall events of 3^30 cm during 1^3 day observation intervals and indicate possible migrating pockets of subglacial water. We present a surge hypothesis that relates late-summer climate to englacial water storage and thence to the subglacial water dynamics ö pressurization, hydraulic jacking, depres- surization and migration ö suggested by our observations. INTRODUCTION with floods of sediment-laden water at the glacier terminus onVariegated and West Fork Glaciers, Alaska (Harrison and Bering Glacier, together with Bagley Icefield, its associated others, 1986, 1994). This work demonstrated that large-scale accumulation area, and smaller tributaries, covers an area of 2 disruption of the basal drainage system results in large 5200 km in the Chugach^Saint Elias Mountains of south- volumes of subglacially stored water and bed separation central Alaska, U.S.A. -

Photographers' Guide to Privacy
Photographers’ Guide to Privacy What every cameraman, photographer and videographer should know about invasion of privacy standards in the 50 states and D.C. Fall 2007 A primer on invasion of privacy The question of when the coverage and agrees that a news organization has omitted by reporting a misuse of taxpayer money. reporting of news becomes an invasion or played down facts that put a truthful state- (Harris v. City of Seattle, 152 Fed.Appx. 565 of privacy is a difficult one, especially for ment in its proper context. In 2003, a Florida (9th Cir. 2005)) photographers and videographers. jury awarded $18 million to Joe Anderson, The invasion of another’s privacy is a Reporting news stories in a way that the owner of a road-paving company who “tort,” meaning a civil wrong against another serves and informs the public will often entail sued over a Pensacola News Journal article that results in injury. publicizing facts or displaying images that that truthfully reported he had shot and A privacy tort occurs when a person or will embarrass or anger someone. killed his wife. However, the fact that an entity breaches the duty to leave another To make privacy matters even more diffi- investigation determined that the death was person alone. When journalists intrude on cult for journalists, courts constantly redefine a hunting accident was not mentioned until a person’s privacy and cause emotional or what is private based upon interpretations two sentences later, which Anderson said cre- monetary injury, they may be forced to pay of the elusive legal standard of a “reasonable ated a false impression that he murdered his damages. -

Geology of the Prince William Sound and Kenai Peninsula Region, Alaska
Geology of the Prince William Sound and Kenai Peninsula Region, Alaska Including the Kenai, Seldovia, Seward, Blying Sound, Cordova, and Middleton Island 1:250,000-scale quadrangles By Frederic H. Wilson and Chad P. Hults Pamphlet to accompany Scientific Investigations Map 3110 View looking east down Harriman Fiord at Serpentine Glacier and Mount Gilbert. (photograph by M.L. Miller) 2012 U.S. Department of the Interior U.S. Geological Survey Contents Abstract ..........................................................................................................................................................1 Introduction ....................................................................................................................................................1 Geographic, Physiographic, and Geologic Framework ..........................................................................1 Description of Map Units .............................................................................................................................3 Unconsolidated deposits ....................................................................................................................3 Surficial deposits ........................................................................................................................3 Rock Units West of the Border Ranges Fault System ....................................................................5 Bedded rocks ...............................................................................................................................5 -

2016 School Library Partner Manual
2016 School Library Partner Manual School Library Partner Manual Contents Summer Reading at New York Libraries: An Introduction .................. 3 2016 Summer Reading ....................................................................... 4 Summer Reading and Your School Library ......................................... 5 Collaborate with your local public library!.........................................................5 Promote summer reading at your school by working with faculty, students, and families ...............................................................................................................6 Summer Reading Websites, Resources, Information, and Materials ... 7 General Summer Reading Resources ................................................. 8 Information and Research ...................................................................................8 Promotional Materials .........................................................................................8 Educators Flyer ...............................................................................................9 Parents Flyer (Side 1) .................................................................................... 10 Parents Flyer (Side 2) .................................................................................... 11 Parents of Young Children Flyer ................................................................... 12 Teen Video Challenge Flyer ......................................................................... 13 Teen NY Flyer -

Crown Prince, Duke of York Attend Opening Ceremony
FAST, SAFE AND SECURE ONLINE MONEY TRANSFER The Fake News Washington Post, Amazon’s “chief lobbyist,” has NOW AVAILABLE another (of many) phony headlines, ON THE BFC APP “Trump Defiant As China Adds Trade Penalties.” WRONG! Should read, Tel: 1722 8888 “Trump Defiant as U.S. Adds Trade www.bfc.com.bh Penalties, Will End Barriers And Massive I.P. Theft.” Typically bad reporting! @realDonaldTrump Friday, April 6, 2018 Issue No. 7708 Today’s Weather 200 Fils Max Min www.newsofbahrain.com www.facebook.com/nobonline newsofbahrain 38444680 nob_bh 31°C 22°C JO3639_Smart_Money_App_Launch_DT_Hamper_6.7cmX4cm.indd9/26/17 3:39 PM 1 HRH Crown Prince Salman bin Hamad Al Khalifa and Prince Andrew, the Duke of York at the opening ceremony Bahrain Crown committed Prince, to boost Duke logistics of York British naval sector: CP attend P 05 opening ceremony base opened Manama Field Marshal Shaikh Khalifa bin Asia to Europe. essential component of Bahrain’s ritain opened its first Naval Ahmed Al Khalifa, Commander-in- The new British hub will help the development programme led by HM Support Facility (NSF) at the Chief of the BDF, Lieutenant General Royal Navy to conduct longer-term King Hamad. BahrainB Defence Force (BDF)’s Mina Dhiyab Bin Saqr Al Noaimi, the BDF deployments in the Gulf and will offer The opening of the NSF represents Salman base yesterday. Chief of Staff, senior BDF officers engineering and logistical support for an important milestone in Bahrain The official opening ceremony attended the ceremony. ships. and the United Kingdom’s joint was attended by His Royal Highness The HMS Juffair naval facility The facility includes sleeping efforts to support regional security Prince Salman bin Hamad Al Khalifa, can house up to around 500 Royal accommodations, sports facilities and and stability, and a clear indication the Crown Prince, Deputy Supreme Navy personnel, including sailors, recreational areas for troops. -

Bering Glacier
YAKATAQA AREA PLAN UNIT 2 BERINg gLACIER Background Unit 2 encompasses the terminal lobe of Bering Glacier, a vast piedmont glacier undergoing a dramatic cycle of surge and retreat. Physical features Bering Glacier is part of the largest icefield in North America. It ranks among the largest temperate glacier systems in the world. The rapid retreat of Bering Glacier, which has been interrupted by periodic galloping surges, has attracted intense national and international scientific interest. During the early 1990s, Bering Glacier retreated at an average rate of 0.6 miles per year. As Bering Glacier retreated, Vitus Lake expanded to over 50,000 acres in the early 1990s, with icebergs up to 1,500 feet long. In 1994 and 1995, the glacier surged explosively at rates occasionally reaching 300 feet per day, and reclaimed much of the lake. Rivers have become lakes because their outlets have been cut off by the ice advance. Water levels have risen 75 feet in Tsiu and Tsivat lakes, formerly river channels. Scientists predict that the beach separating Vitus Lake from the Gulf of Alaska will breach, and the tidal incursion will cause the glacier to retreat nearly 35 miles in the next 50-100 years, creating a fiord as large as Yakutat Bay. High tides exceeding six feet in the Gulf of Alaska presently enter Vitus Lake through the Seal River. Access There are unimproved airstrips on both sides of Seal River. Land status All lands in this unit are state-selected from the Bureau of Land Management. Subunit 2a (in Range 9E) was selected as a potential overland transportation corridor to the Copper River region via one of the river drainages in Chugach National Forest. -

POP Family Handbook 18-19 V3.Indd
Family Handbook 2018-2019 5100 WEST PLANO PARKWAY | PLANO TX 75093 972.380.5505 | 972.380.2570 FAX | POPSCHOOL.NET INSPIRED BY FAITH. DRIVEN BY EXCELLENCE. PRINCE OF PEACE CATHOLIC SCHOOL MISSION STATEMENT Prince of Peace Catholic School is devoted to instilling strong Catholic values, fostering a life of faith and servant leadership, providing a challenging academic environment and inspiring each student to shine to the fullest extent of his or her God-given potential. VISION STATEMENT We cultivate faithful servants and inspired leaders who are motivated and well-equipped to infl uence the world for Christ. PRINCE OF PEACE STUDENT PLEDGE I am a member of Prince of Peace Catholic School. As a child of God and a servant to others, I am honest, responsible, and respectful of myself and others at all times. SCHOOL IDENTITY Stars SCHOOL COLORS Silver & Blue ACCREDITATION Prince of Peace Catholic School is accredited by the Texas Catholic Conference Education Department. HISTORY OF THE SCHOOL On August 19, 1991, Prince of Peace Catholic School opened its doors for the fi rst time. Our school was started from the vision of our founding pastor, the late Fr. Jim Balint. Fr. Jim’s vision was to provide a vibrant Catholic Community for the West Plano area. Many families worked hard to be the fi rst in line while sleeping overnight in tents to ensure their children were able to enroll in the founding Preschool classes. The original site of the school was at the Preston and Park intersection in the strip mall that is now where the Studio Movie Grill is located. -

Yakutat Tlingit and Wrangell-St. Elias National Park and Preserve: an Ethnographic Overview and Assessment
Portland State University PDXScholar Anthropology Faculty Publications and Presentations Anthropology 2015 Yakutat Tlingit and Wrangell-St. Elias National Park and Preserve: An Ethnographic Overview and Assessment Douglas Deur Portland State University, [email protected] Thomas Thornton University of Oxford Rachel Lahoff Portland State University Jamie Hebert Portland State University Follow this and additional works at: https://pdxscholar.library.pdx.edu/anth_fac Part of the Social and Cultural Anthropology Commons Let us know how access to this document benefits ou.y Citation Details Deur, Douglas; Thornton, Thomas; Lahoff, Rachel; and Hebert, Jamie, "Yakutat Tlingit and Wrangell-St. Elias National Park and Preserve: An Ethnographic Overview and Assessment" (2015). Anthropology Faculty Publications and Presentations. 99. https://pdxscholar.library.pdx.edu/anth_fac/99 This Report is brought to you for free and open access. It has been accepted for inclusion in Anthropology Faculty Publications and Presentations by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected]. National Park Service U.S. Department of the Interior Wrangell-St. Elias National Park and Preserve Yakutat Tlingit and Wrangell-St. Elias National Park and Preserve: An Ethnographic Overview and Assessment Douglas Deur, Ph.D. Thomas Thornton, Ph.D. Rachel Lahoff, M.A. Jamie Hebert, M.A. 2015 Cover photos: Mount St. Elias / Was'ei Tashaa (courtesy Wikimedia Commons); Mount St. Elias Dancers (courtesy Yakutat Tlingit Tribe / Bert Adams Sr.) Yakutat Tlingit and Wrangell-St. Elias National Park and Preserve: An Ethnographic Overview and Assessment 2015 Douglas Deur, Thomas Thornton, Rachel Lahoff, and Jamie Hebert Portland State University Department of Anthropology United States Department of the Interior National Park Service Wrangell-St. -
A, Index Map of the St. Elias Mountains of Alaska and Canada Showing the Glacierized Areas (Index Map Modi- Fied from Field, 1975A)
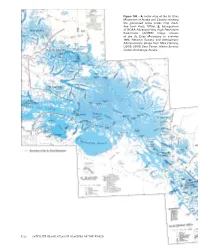
Figure 100.—A, Index map of the St. Elias Mountains of Alaska and Canada showing the glacierized areas (index map modi- fied from Field, 1975a). B, Enlargement of NOAA Advanced Very High Resolution Radiometer (AVHRR) image mosaic of the St. Elias Mountains in summer 1995. National Oceanic and Atmospheric Administration image from Mike Fleming, USGS, EROS Data Center, Alaska Science Center, Anchorage, Alaska. K122 SATELLITE IMAGE ATLAS OF GLACIERS OF THE WORLD St. Elias Mountains Introduction Much of the St. Elias Mountains, a 750×180-km mountain system, strad- dles the Alaskan-Canadian border, paralleling the coastline of the northern Gulf of Alaska; about two-thirds of the mountain system is located within Alaska (figs. 1, 100). In both Alaska and Canada, this complex system of mountain ranges along their common border is sometimes referred to as the Icefield Ranges. In Canada, the Icefield Ranges extend from the Province of British Columbia into the Yukon Territory. The Alaskan St. Elias Mountains extend northwest from Lynn Canal, Chilkat Inlet, and Chilkat River on the east; to Cross Sound and Icy Strait on the southeast; to the divide between Waxell Ridge and Barkley Ridge and the western end of the Robinson Moun- tains on the southwest; to Juniper Island, the central Bagley Icefield, the eastern wall of the valley of Tana Glacier, and Tana River on the west; and to Chitistone River and White River on the north and northwest. The boundar- ies presented here are different from Orth’s (1967) description. Several of Orth’s descriptions of the limits of adjacent features and the descriptions of the St. -

Video Production 101: Delivering the Message
VIDEO PRODUCTION VIDEO PRODUCTION 101 101 Delivering the Message Antonio Manriquez & Thomas McCluskey VIDEO PRODUCTION 101 Delivering the Message Antonio Manriquez & Thomas McCluskey Video Production 101 Delivering the Message Antonio Manriquez and Thomas McCluskey Peachpit Press Find us on the Web at www.peachpit.com To report errors, please send a note to [email protected] Peachpit Press is a division of Pearson Education Copyright © 2015 by Antonio Jesus Manriquez and Thomas McCluskey Senior Editor: Karyn Johnson Development Editor: Stephen Nathans-Kelly Senior Production Editor: Tracey Croom Copyeditor and Proofreader: Kim Wimpsett Compositor: Danielle Foster Indexer: Jack Lewis Interior Design: Danielle Foster Cover Design: Aren Straiger Notice of Rights All rights reserved. No part of this book may be reproduced or transmitted in any form by any means, electronic, mechanical, photocopying, recording, or otherwise, without the prior written permission of the publisher. For information on getting permission for reprints and excerpts, contact [email protected]. Notice of Liability The information in this book is distributed on an “As Is” basis without warranty. While every precaution has been taken in the preparation of the book, neither the authors nor Peachpit shall have any liability to any person or entity with respect to any loss or damage caused or alleged to be caused directly or indirectly by the instructions contained in this book or by the computer software and hardware products described in it. Trademarks Many of the designations used by manufacturers and sellers to distinguish their products are claimed as trademarks. Where those designations appear in this book, and Peachpit was aware of a trademark claim, the designations appear as requested by the owner of the trademark. -

Holocene Glacier Fluctuations in Alaska
Quaternary Science Reviews 28 (2009) 2034–2048 Contents lists available at ScienceDirect Quaternary Science Reviews journal homepage: www.elsevier.com/locate/quascirev Holocene glacier fluctuations in Alaska David J. Barclay a,*, Gregory C. Wiles b, Parker E. Calkin c a Geology Department, State University of New York College at Cortland, Cortland, NY 13045, USA b Department of Geology, The College of Wooster, Wooster, OH 44691, USA c Institute of Arctic and Alpine Research, University of Colorado, Boulder, CO 80309, USA article info abstract Article history: This review summarizes forefield and lacustrine records of glacier fluctuations in Alaska during the Received 9 May 2008 Holocene. Following retreat from latest Pleistocene advances, valley glaciers with land-based termini Received in revised form were in retracted positions during the early to middle Holocene. Neoglaciation began in some areas by 15 January 2009 4.0 ka and major advances were underway by 3.0 ka, with perhaps two distinct early Neoglacial Accepted 29 January 2009 expansions centered respectively on 3.3–2.9 and 2.2–2.0 ka. Tree-ring cross-dates of glacially killed trees at two termini in southern Alaska show a major advance in the AD 550s–720s. The subsequent Little Ice Age (LIA) expansion was underway in the AD 1180s–1320s and culminated with two advance phases respectively in the 1540s–1710s and in the 1810s–1880s. The LIA advance was the largest Holocene expansion in southern Alaska, although older late Holocene moraines are preserved on many forefields in northern and interior Alaska. Tidewater glaciers around the rim of the Gulf of Alaska have made major advances throughout the Holocene. -

1144 05/16 Issue One Thousand One Hundred Forty-Four Thursday, May Sixteen, Mmxix
#1144 05/16 issue one thousand one hundred forty-four thursday, may sixteen, mmxix “9-1-1: LONE STAR” Series / FOX TWENTIETH CENTURY FOX TELEVISION 10201 W. Pico Blvd, Bldg. 1, Los Angeles, CA 90064 [email protected] PHONE: 310-969-5511 FAX: 310-969-4886 STATUS: Summer 2019 PRODUCER: Ryan Murphy - Brad Falchuk - Tim Minear CAST: Rob Lowe RYAN MURPHY PRODUCTIONS 10201 W. Pico Blvd., Bldg. 12, The Loft, Los Angeles, CA 90035 310-369-3970 Follows a sophisticated New York cop (Lowe) who, along with his son, re-locates to Austin, and must try to balance saving those who are at their most vulnerable with solving the problems in his own life. “355” Feature Film 05-09-19 ê GENRE FILMS 10201 West Pico Boulevard Building 49, Los Angeles, CA 90035 PHONE: 310-369-2842 STATUS: July 8 LOCATION: Paris - London - Morocco PRODUCER: Kelly Carmichael WRITER: Theresa Rebeck DIRECTOR: Simon Kinberg LP: Richard Hewitt PM: Jennifer Wynne DP: Roger Deakins CAST: Jessica Chastain - Penelope Cruz - Lupita Nyong’o - Fan Bingbing - Sebastian Stan - Edgar Ramirez FRECKLE FILMS 205 West 57th St., New York, NY 10019 646-830-3365 [email protected] FILMNATION ENTERTAINMENT 150 W. 22nd Street, Suite 1025, New York, NY 10011 917-484-8900 [email protected] GOLDEN TITLE 29 Austin Road, 11/F, Tsim Sha Tsui, Kowloon, Hong Kong, China UNIVERSAL PICTURES 100 Universal City Plaza Universal City, CA 91608 818-777-1000 A large-scale espionage film about international agents in a grounded, edgy action thriller. The film involves these top agents from organizations around the world uniting to stop a global organization from acquiring a weapon that could plunge an already unstable world into total chaos.