Lecture 11: Homogeneous Nucleation: Solid-Solid Phase Transformation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lecture Notes: BCS Theory of Superconductivity
Lecture Notes: BCS theory of superconductivity Prof. Rafael M. Fernandes Here we will discuss a new ground state of the interacting electron gas: the superconducting state. In this macroscopic quantum state, the electrons form coherent bound states called Cooper pairs, which dramatically change the macroscopic properties of the system, giving rise to perfect conductivity and perfect diamagnetism. We will mostly focus on conventional superconductors, where the Cooper pairs originate from a small attractive electron-electron interaction mediated by phonons. However, in the so- called unconventional superconductors - a topic of intense research in current solid state physics - the pairing can originate even from purely repulsive interactions. 1 Phenomenology Superconductivity was discovered by Kamerlingh-Onnes in 1911, when he was studying the transport properties of Hg (mercury) at low temperatures. He found that below the liquifying temperature of helium, at around 4:2 K, the resistivity of Hg would suddenly drop to zero. Although at the time there was not a well established model for the low-temperature behavior of transport in metals, the result was quite surprising, as the expectations were that the resistivity would either go to zero or diverge at T = 0, but not vanish at a finite temperature. In a metal the resistivity at low temperatures has a constant contribution from impurity scattering, a T 2 contribution from electron-electron scattering, and a T 5 contribution from phonon scattering. Thus, the vanishing of the resistivity at low temperatures is a clear indication of a new ground state. Another key property of the superconductor was discovered in 1933 by Meissner. -
Supercritical Fluid Extraction of Positron-Emitting Radioisotopes from Solid Target Matrices
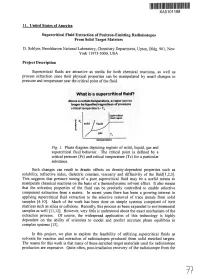
XA0101188 11. United States of America Supercritical Fluid Extraction of Positron-Emitting Radioisotopes From Solid Target Matrices D. Schlyer, Brookhaven National Laboratory, Chemistry Department, Upton, Bldg. 901, New York 11973-5000, USA Project Description Supercritical fluids are attractive as media for both chemical reactions, as well as process extraction since their physical properties can be manipulated by small changes in pressure and temperature near the critical point of the fluid. What is a supercritical fluid? Above a certain temperature, a vapor can no longer be liquefied regardless of pressure critical temperature - Tc supercritical fluid r«gi on solid a u & temperature Fig. 1. Phase diagram depicting regions of solid, liquid, gas and supercritical fluid behavior. The critical point is defined by a critical pressure (Pc) and critical temperature (Tc) for a particular substance. Such changes can result in drastic effects on density-dependent properties such as solubility, refractive index, dielectric constant, viscosity and diffusivity of the fluid[l,2,3]. This suggests that pressure tuning of a pure supercritical fluid may be a useful means to manipulate chemical reactions on the basis of a thermodynamic solvent effect. It also means that the solvation properties of the fluid can be precisely controlled to enable selective component extraction from a matrix. In recent years there has been a growing interest in applying supercritical fluid extraction to the selective removal of trace metals from solid samples [4-10]. Much of the work has been done on simple systems comprised of inert matrices such as silica or cellulose. Recently, this process as been expanded to environmental samples as well [11,12]. -
Colloidal Crystallization: Nucleation and Growth
Colloidal Crystallization: Nucleation and Growth Dave Weitz Harvard Urs Gasser Konstanz Andy Schofield Edinburgh Rebecca Christianson Harvard Peter Pusey Edinburgh Peter Schall Harvard Frans Spaepen Harvard Eric Weeks Emory John Crocker UPenn •Colloids as model systems – soft materials •Nucleation and growth of colloidal crystals •Defect growth in crystals •Binary Alloy Colloidal Crystals NSF, NASA http://www.deas.harvard.edu/projects/weitzlab EMU 6/7//04 Colloidal Crystals Colloids 1 nm - 10 µm solid particles in a solvent Ubiquitous ink, paint, milk, butter, mayonnaise, toothpaste, blood Suspensions can act like both liquid and solid Modify flow properties Control: Size, uniformity, interactions Colloidal Particles •Solid particles in fluid •Hard Spheres •Volume exclusion •Stability: •Short range repulsion •Sometimes a slight charge Colloid Particles are: •Big Slow •~ a ~ 1 micron • τ ~ a2/D ~ ms to sec •Can “see” them •Follow individual particle dynamics Model: Colloid Æ Atom Phase Behavior Colloids Atomic Liquids U U s s Hard Spheres Leonard-Jones Osmotic Pressure Attraction Centro-symmetric Centro-symmetric Thermalized: kBT Thermalized: kBT Gas Gas Liquid Density Liquid Solid Solid Phase behavior is similar Hard Sphere Phase Diagram Volume Fraction Controls Phase Behavior liquid - crystal liquid coexistence crystal 49% 54% 63% 74% φ maximum packing maximum packing φRCP≈0.63 φHCP=0.74 0 Increase φ => Decrease Temperature F = U - TS Entropy Drives Crystallization 0 Entropy => Free Volume F = U - TS Disordered: Ordered: •Higher configurational -

Equation of State and Phase Transitions in the Nuclear
National Academy of Sciences of Ukraine Bogolyubov Institute for Theoretical Physics Has the rights of a manuscript Bugaev Kyrill Alekseevich UDC: 532.51; 533.77; 539.125/126; 544.586.6 Equation of State and Phase Transitions in the Nuclear and Hadronic Systems Speciality 01.04.02 - theoretical physics DISSERTATION to receive a scientific degree of the Doctor of Science in physics and mathematics arXiv:1012.3400v1 [nucl-th] 15 Dec 2010 Kiev - 2009 2 Abstract An investigation of strongly interacting matter equation of state remains one of the major tasks of modern high energy nuclear physics for almost a quarter of century. The present work is my doctor of science thesis which contains my contribution (42 works) to this field made between 1993 and 2008. Inhere I mainly discuss the common physical and mathematical features of several exactly solvable statistical models which describe the nuclear liquid-gas phase transition and the deconfinement phase transition. Luckily, in some cases it was possible to rigorously extend the solutions found in thermodynamic limit to finite volumes and to formulate the finite volume analogs of phases directly from the grand canonical partition. It turns out that finite volume (surface) of a system generates also the temporal constraints, i.e. the finite formation/decay time of possible states in this finite system. Among other results I would like to mention the calculation of upper and lower bounds for the surface entropy of physical clusters within the Hills and Dales model; evaluation of the second virial coefficient which accounts for the Lorentz contraction of the hard core repulsing potential between hadrons; inclusion of large width of heavy quark-gluon bags into statistical description. -

Entropy and the Tolman Parameter in Nucleation Theory
entropy Article Entropy and the Tolman Parameter in Nucleation Theory Jürn W. P. Schmelzer 1 , Alexander S. Abyzov 2 and Vladimir G. Baidakov 3,* 1 Institute of Physics, University of Rostock, Albert-Einstein-Strasse 23-25, 18059 Rostock, Germany 2 National Science Center Kharkov Institute of Physics and Technology, 61108 Kharkov, Ukraine 3 Institute of Thermal Physics, Ural Branch of the Russian Academy of Sciences, Amundsen Street 107a, 620016 Yekaterinburg, Russia * Correspondence: [email protected]; Tel.: +49-381-498-6889; Fax: +49-381-498-6882 Received: 23 May 2019; Accepted: 5 July 2019; Published: 9 July 2019 Abstract: Thermodynamic aspects of the theory of nucleation are commonly considered employing Gibbs’ theory of interfacial phenomena and its generalizations. Utilizing Gibbs’ theory, the bulk parameters of the critical clusters governing nucleation can be uniquely determined for any metastable state of the ambient phase. As a rule, they turn out in such treatment to be widely similar to the properties of the newly-evolving macroscopic phases. Consequently, the major tool to resolve problems concerning the accuracy of theoretical predictions of nucleation rates and related characteristics of the nucleation process consists of an approach with the introduction of the size or curvature dependence of the surface tension. In the description of crystallization, this quantity has been expressed frequently via changes of entropy (or enthalpy) in crystallization, i.e., via the latent heat of melting or crystallization. Such a correlation between the capillarity phenomena and entropy changes was originally advanced by Stefan considering condensation and evaporation. It is known in the application to crystal nucleation as the Skapski–Turnbull relation. -

Heterogeneous Nucleation of Water Vapor on Different Types of Black Carbon Particles
https://doi.org/10.5194/acp-2020-202 Preprint. Discussion started: 21 April 2020 c Author(s) 2020. CC BY 4.0 License. Heterogeneous nucleation of water vapor on different types of black carbon particles Ari Laaksonen1,2, Jussi Malila3, Athanasios Nenes4,5 5 1Finnish Meteorological Institute, 00101 Helsinki, Finland. 2Department of Applied Physics, University of Eastern Finland, 70211 Kuopio, Finland. 3Nano and Molecular Systems Research Unit, 90014 University of Oulu, Finland. 4Laboratory of Atmospheric Processes and their Impacts, School of Architecture, Civil & Environmental Engineering, École 10 Polytechnique Federale de Lausanne, 1015, Lausanne, Switzerland 5 Institute of Chemical Engineering Sciences, Foundation for Research and Technology Hellas (FORTH/ICE-HT), 26504, Patras, Greece Correspondence to: Ari Laaksonen ([email protected]) 15 Abstract: Heterogeneous nucleation of water vapor on insoluble particles affects cloud formation, precipitation, the hydrological cycle and climate. Despite its importance, heterogeneous nucleation remains a poorly understood phenomenon that relies heavily on empirical information for its quantitative description. Here, we examine heterogeneous nucleation of water vapor on and cloud drop activation of different types of soots, both pure black carbon particles, and black carbon particles mixed with secondary organic matter. We show that the recently developed adsorption nucleation theory 20 quantitatively predicts the nucleation of water and droplet formation upon particles of the various soot types. A surprising consequence of this new understanding is that, with sufficient adsorption site density, soot particles can activate into cloud droplets – even when completely lacking any soluble material. 1 https://doi.org/10.5194/acp-2020-202 Preprint. Discussion started: 21 April 2020 c Author(s) 2020. -

The Role of Latent Heat in Heterogeneous Ice Nucleation
EGU21-16164, updated on 02 Oct 2021 https://doi.org/10.5194/egusphere-egu21-16164 EGU General Assembly 2021 © Author(s) 2021. This work is distributed under the Creative Commons Attribution 4.0 License. The role of latent heat in heterogeneous ice nucleation Olli Pakarinen, Cintia Pulido Lamas, Golnaz Roudsari, Bernhard Reischl, and Hanna Vehkamäki University of Helsinki, INAR/Physics, University of Helsinki, Finland ([email protected]) Understanding the way in which ice forms is of great importance to many fields of science. Pure water droplets in the atmosphere can remain in the liquid phase to nearly -40º C. Crystallization of ice in the atmosphere therefore typically occurs in the presence of ice nucleating particles (INPs), such as mineral dust or organic particles, which trigger heterogeneous ice nucleation at clearly higher temperatures. The growth of ice is accompanied by a significant release of latent heat of fusion, which causes supercooled liquid droplets to freeze in two stages [Pruppacher and Klett, 1997]. We are studying these topics by utilizing the monatomic water model [Molinero and Moore, 2009] for unbiased molecular dynamics (MD) simulations, where different surfaces immersed in water are cooled below the melting point over tens of nanoseconds of simulation time and crystallization is followed. With a combination of finite difference calculations and novel moving-thermostat molecular dynamics simulations we show that the release of latent heat from ice growth has a noticeable effect on both the ice growth rate and the initial structure of the forming ice. However, latent heat is found not to be as critically important in controlling immersion nucleation as it is in vapor-to- liquid nucleation [Tanaka et al.2017]. -

Using Supercritical Fluid Technology As a Green Alternative During the Preparation of Drug Delivery Systems
pharmaceutics Review Using Supercritical Fluid Technology as a Green Alternative During the Preparation of Drug Delivery Systems Paroma Chakravarty 1, Amin Famili 2, Karthik Nagapudi 1 and Mohammad A. Al-Sayah 2,* 1 Small Molecule Pharmaceutics, Genentech, Inc. So. San Francisco, CA 94080, USA; [email protected] (P.C.); [email protected] (K.N.) 2 Small Molecule Analytical Chemistry, Genentech, Inc. So. San Francisco, CA 94080, USA; [email protected] * Correspondence: [email protected]; Tel.: +650-467-3810 Received: 3 October 2019; Accepted: 18 November 2019; Published: 25 November 2019 Abstract: Micro- and nano-carrier formulations have been developed as drug delivery systems for active pharmaceutical ingredients (APIs) that suffer from poor physico-chemical, pharmacokinetic, and pharmacodynamic properties. Encapsulating the APIs in such systems can help improve their stability by protecting them from harsh conditions such as light, oxygen, temperature, pH, enzymes, and others. Consequently, the API’s dissolution rate and bioavailability are tremendously improved. Conventional techniques used in the production of these drug carrier formulations have several drawbacks, including thermal and chemical stability of the APIs, excessive use of organic solvents, high residual solvent levels, difficult particle size control and distributions, drug loading-related challenges, and time and energy consumption. This review illustrates how supercritical fluid (SCF) technologies can be superior in controlling the morphology of API particles and in the production of drug carriers due to SCF’s non-toxic, inert, economical, and environmentally friendly properties. The SCF’s advantages, benefits, and various preparation methods are discussed. Drug carrier formulations discussed in this review include microparticles, nanoparticles, polymeric membranes, aerogels, microporous foams, solid lipid nanoparticles, and liposomes. -

Thermodynamics and Kinetics of Binary Nucleation in Ideal-Gas Mixtures
1 Thermodynamics and kinetics of binary nucleation in ideal-gas mixtures Nikolay V. Alekseechkin Akhiezer Institute for Theoretical Physics, National Science Centre “Kharkov Institute of Physics and Technology”, Akademicheskaya Street 1, Kharkov 61108, Ukraine Email: [email protected] Abstract . The nonisothermal single-component theory of droplet nucleation (Alekseechkin, 2014) is extended to binary case; the droplet volume V , composition x , and temperature T are the variables of the theory. An approach based on macroscopic kinetics (in contrast to the standard microscopic model of nucleation operating with the probabilities of monomer attachment and detachment) is developed for the droplet evolution and results in the derived droplet motion equations in the space (V , x,T) - equations for V& ≡ dV / dt , x& , and T& . The work W (V , x,T) of the droplet formation is calculated; it is obtained in the vicinity of the saddle point as a quadratic form with diagonal matrix. Also the problem of generalizing the single-component Kelvin equation for the equilibrium vapor pressure to binary case is solved; it is presented here as a problem of integrability of a Pfaffian equation. The equation for T& is shown to be the first law of thermodynamics for the droplet, which is a consequence of Onsager’s reciprocal relations and the linked-fluxes concept. As an example of ideal solution for demonstrative numerical calculations, the o-xylene-m-xylene system is employed. Both nonisothermal and enrichment effects are shown to exist; the mean steady-state overheat of droplets and their mean steady-state enrichment are calculated with the help of the 3D distribution function. -
Lecture 5 Non-Aqueous Phase Liquid (NAPL) Fate and Transport
Lecture 5 Non-Aqueous Phase Liquid (NAPL) Fate and Transport Factors affecting NAPL movement Fluid properties: Porous medium: 9 Density Permeability 9 Interfacial tension Pore size 9 Residual saturation Structure Partitioning properties Solubility Ground water: Volatility and vapor density Water content 9 Velocity Partitioning processes NAPL can partition between four phases: NAPL Gas Solid (vapor) Aqueous solution Water to gas partitioning (volatilization) Aqueous ↔ gaseous Henry’s Law (for dilute solutions) 3 Dimensionless (CG, CW in moles/m ) C G = H′ CW Dimensional (P = partial pressure in atm) P = H CW Henry’s Law Constant H has dimensions: atm m3 / mol H’ is dimensionless H’ = H/RT R = gas constant = 8.20575 x 10-5 atm m3/mol °K T = temperature in °K NAPL to gas partitioning (volatilization) NAPL ↔ gaseous Raoult’s Law: CG = Xt (P°/RT) Xt = mole fraction of compound in NAPL [-] P° = pure compound vapor pressure [atm] R = universal gas constant [m3-atm/mole/°K] T = temperature [°K] Volatility Vapor pressure P° is measure of volatility P° > 1.3 x 10-3 atm → compound is “volatile” 1.3 x 10-3 > P° > 1.3 x 10-13 atm → compound is “semi-volatile” Example: equilibrium with benzene P° = 76 mm Hg at 20°C = 0.1 atm R = 8.205 x 10-5 m3-atm/mol/°K T = 20°C (assumed) = 293°K Assume 100% benzene, mole fraction Xt = 1 3 CG = Xt P°/(RT) = 4.16 mol/m Molecular weight of benzene, C6H6 = 78 g/mol 3 3 CG = 4.16 mol/m × 78 g/mol = 324 g/m = 0.32 g/L 6 CG = 0.32 g/L x 24 L/mol / (78 g/mol) x 10 = 99,000 ppmv One mole of ideal gas = 22.4 L at STP (1 atm, 0 C), Corrected to 20 C: 293/273*22.4 = 24.0 L/mol Gas concentration in equilibrium with pure benzene NAPL Example: equilibrium with gasoline Gasoline is complex mixture – mole fraction is difficult to determine and varies Benzene = 1 to several percent (Cline et al., 1991) Based on analysis reported by Johnson et al. -

Introduction to Unconventional Superconductivity Manfred Sigrist
Introduction to Unconventional Superconductivity Manfred Sigrist Theoretische Physik, ETH-Hönggerberg, 8093 Zürich, Switzerland Abstract. This lecture gives a basic introduction into some aspects of the unconventionalsupercon- ductivity. First we analyze the conditions to realized unconventional superconductivity in strongly correlated electron systems. Then an introduction of the generalized BCS theory is given and sev- eral key properties of unconventional pairing states are discussed. The phenomenological treatment based on the Ginzburg-Landau formulations provides a view on unconventional superconductivity based on the conceptof symmetry breaking.Finally some aspects of two examples will be discussed: high-temperature superconductivity and spin-triplet superconductivity in Sr2RuO4. Keywords: Unconventional superconductivity, high-temperature superconductivity, Sr2RuO4 INTRODUCTION Superconductivity remains to be one of the most fascinating and intriguing phases of matter even nearly hundred years after its first observation. Owing to the breakthrough in 1957 by Bardeen, Cooper and Schrieffer we understand superconductivity as a conden- sate of electron pairs, so-called Cooper pairs, which form due to an attractive interaction among electrons. In the superconducting materials known until the mid-seventies this interaction is mediated by electron-phonon coupling which gises rise to Cooper pairs in the most symmetric form, i.e. vanishing relative orbital angular momentum and spin sin- glet configuration (nowadays called s-wave pairing). After the introduction of the BCS concept, also studies of alternative pairing forms started. Early on Anderson and Morel [1] as well as Balian and Werthamer [2] investigated superconducting phases which later would be identified as the A- and the B-phase of superfluid 3He [3]. In contrast to the s-wave superconductors the A- and B-phase are characterized by Cooper pairs with an- gular momentum 1 and spin-triplet configuration. -

Spinodal Lines and Equations of State: a Review
10 l Nuclear Engineering and Design 95 (1986) 297-314 297 North-Holland, Amsterdam SPINODAL LINES AND EQUATIONS OF STATE: A REVIEW John H. LIENHARD, N, SHAMSUNDAR and PaulO, BINEY * Heat Transfer/ Phase-Change Laboratory, Mechanical Engineering Department, University of Houston, Houston, TX 77004, USA The importance of knowing superheated liquid properties, and of locating the liquid spinodal line, is discussed, The measurement and prediction of the spinodal line, and the limits of isentropic pressure undershoot, are reviewed, Means are presented for formulating equations of state and fundamental equations to predict superheated liquid properties and spinodal limits, It is shown how the temperature dependence of surface tension can be used to verify p - v - T equations of state, or how this dependence can be predicted if the equation of state is known. 1. Scope methods for making simplified predictions of property information, which can be applied to the full range of Today's technology, with its emphasis on miniaturiz fluids - water, mercury, nitrogen, etc. [3-5]; and predic ing and intensifying thennal processes, steadily de tions of the depressurizations that might occur in ther mands higher heat fluxes and poses greater dangers of mohydraulic accidents. (See e.g. refs. [6,7].) sending liquids beyond their boiling points into the metastable, or superheated, state. This state poses the threat of serious thermohydraulic explosions. Yet we 2. The spinodal limit of liquid superheat know little about its thermal properties, and cannot predict process behavior after a liquid becomes super heated. Some of the practical situations that require a 2.1. The role of the equation of state in defining the spinodal line knowledge the limits of liquid superheat, and the physi cal properties of superheated liquids, include: - Thennohydraulic explosions as might occur in nuclear Fig.