Parking Assistance System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Quick User Guide
30 QuicQk User Guide For your ease and convenience, this guide is intended to find the most essential functions you will need to start experiencing your Infiniti Q30. Cockpit overview 2 Steering Wheel Controls (right hand side) 14 Instrument panel 4 Vehicle Information Display 15 Meters & gauges 6 Centre Multifunction Control Panel 16 Doors Unlocking & Locking 8 Automatic Transmission Operation 17 Intelligent Key System 8 Tyre Pressure Monitoring System 18 Anti-theft Alarm System 8 Audio System 19 Front Seat and Head Restraint Adjustment 9 Bluetooth Streaming Audio 19 Automatic Drive Positioner System 9 Connecting your Mobile Phone via Bluetooth 20 Automatic Front Passenger Front Air Bag Auxiliary Inputs 20 Deactivation 10 Navigation System 20 Headlight Switch 10 Climate Control 21 Combination Switch 11 Electronic Parking Sensor System 23 High Beam Assist (where fitted) 11 Rear/Around View Monitor 23 Ignition Switch Positions 12 Intelligent Park Assist 24 Instrument Brightness Control 12 Cruise Control and Speed Limiter Systems 24 Clock Settings 12 Hill Start Assist 26 Power Windows and Outside Mirrors 13 Driver Assistance Systems 26 Sunshade Operation 13 Fuel Filling 28 Automatic Anti-dazzle Rearview Mirror 13 Bonnet Opening 28 Steering Wheel Controls (left hand side) 14 It is important to note that this guide does not replace the full Owner's Manual, which should be referred to for complete details, security items and warnings. 1 Cockpit overview 2 Cockpit overview Electric parking brake switch Light switch Cruise control/speed limiter -

Aftermarket Vehicle Soluɵons
AŌermarket Vehicle SoluƟons Ltd ALARMS 1. 7590TH15 Thatcham category 1 alarm 2. 7590T2-1 Thatcham category 2-1 upgrade 3. 931T Thatcham category 2-1 upgrade 4. 931TMH Thatcham category 2-1 upgrade 5. 5079T Thatcham category 2 immobiliser 5. 7854T Thatcham category 1 or 2-1 motorcycle alarm 6. 932 Can bus remote alarm upgrade 7. 862 Remote central locking alarm 8. 822 OE remote alarm upgrade 9. 7855MyBasic Self managed tracking system 10. 7892MyMini GPS/GSM self managed tracking system 11. 839 OE Centrol locking upgrade module 11. 6239 4 door cenrol door locking kit 11. ---- Slave door motors 12. ---- Alarm accessories 13. ---- Alarm feature table PARKING SENSOR KITS 14. 814FH Front parking sensor kit 15. 514 Rear parking sensor kit (new version) 16. 814 Rear parking sensor kit 17. 814/16 Rear parking sensor kit 18. 814D Rear parking sensor kit 19. 814W Wireless rear parking sensor kit 20. 818H Front and rear parking sensor kit 21. 818W Wireless front and rear parking sensor kit CRUISE CONTROLS & SPEED LIMITERS 22. AP 500 Cable driven cruise control 23. AP900 Drive by wire cruise control & speed limiter 24. AP900 Drive by wire cruise control & speed limiter 25. SL900 Drive by wire speed limiter 26. SL900 Drive by wire speed limiter 27. ---- Control command modules 28. ---- Accessories 29. Carbon fibre heated seat kits 7590TK15 THATCHAM CATEGORY 1 ALARM TC2 - 1314/0904 Remote alarm system with two points of immobilisation and multi-point central door-locking. WIRELESS SENSOR COMPATIBLE Features Installer programmable features: • two 2-button -

Guidelines for Testing Drivers in Vehicles with Advanced Driver Assistance Systems
vehicle SKILLS technologies driver ADAS assistance license testing SYSTEMS Guidelines for Testing Drivers in Vehicles with Advanced Driver Assistance Systems August 2019 2019 © Copyright All Rights Reserved American Association of Motor Vehicle Administrators Cover photo credits: “Driver Assistance System” © RYosha/istockphoto.com; “Driving Lesson” © dragana991/istockphoto.com; “Autonomous Car Sensing System” © metamorworks/istockphoto.com. Contents Executive Summary . 2 Introduction . 4 Structure of This Document . 5 Universal Considerations for Driver Testing and Examiner Training . 6 Section One Vehicle Warning Systems Technologies . 7 Back-up warning . 7 Blind spot monitor and warning . 9 Camera technologies . 11 Rear camera . 11 Sideview camera . 12 Surround-view monitor or around-view monitor system . 14 Curve speed warning . 15 Detection technologies . 16 Bicycle, pedestrian, and obstacle detection . 16 Forward collision warning systems . 18 High speed alert . 20 Lane departure warning device . 21 Parking sensors . 23 Rear cross-traffic alert . 24 Section Two Driver Assistance Systems Technologies . 26 Driver Assistance Systems – Safety Critica Technologies . 26 Automatic emergency braking systems or brake assist . 26 Automatic reverse braking . 28 Lane keeping assist . 29 Left turn crash avoidance . 30 Driver Assistance Systems – Convenience Technologies . 32 Adaptive cruise control . 32 Automatic parallel parking . 33 Section Three Conclusions . 35 Next Steps . 36 Acknowledgements . 37 Contents 1 Executive Summary The American Association of Motor Vehicle Terminology Administrators (AAMVA) has been leading an effort to assist its members to advance their understanding AAMVA based this report on information and terms of vehicle technologies designed to perform and/or used on the website MyCarDoesWhat .org, which was assist in some or all of the dynamic driving tasks that developed by the National Safety Council and the humans perform today . -

2020-Nissan-Murano-Owner-Manual
2020 MURANO OWNER’S MANUAL and MAINTENANCE INFORMATION For your safety, read carefully and keep in this vehicle. OWNER’S MANUAL SUPPLEMENT The information contained within this supplement revises or adds to “UNAVAILABLE FRONT RADAR OBSTRUCTION MESSAGE” of the “Instruments and controls” and “Starting and driv- ing” section in the NISSAN 2020 Murano Owner’s Manual. Please read carefully and keep in vehicle. Printing: October 2019 Publication No. SU20EA 0Z52U0 LIC4354 VEHICLE INFORMATION DISPLAY WARNINGS AND INDICATORS 1. Push brake and start switch to drive 19. Power will turn off to save the battery 34. Speed Limit Sign indicator (if so equipped) 2. No Key Detected 20. Power turned off to save the battery 35. Lane Departure Warning (LDW)/ Intelli- 3. Shift to Park 21. Reminder: Turn OFF Headlights gent Lane Intervention (I-LI) indicator (if 4. Key Battery Low 22. Driver Attention Alert Take a Break? so equipped) 5. Engine start operation for Intelligent Key 23. Driver Attention Alert Malfunction 36. Unavailable High Cabin Temperature (if system (if I-Key battery level is low) so equipped) 24. Cruise control indicator (if so equipped) 6. Key ID Incorrect 37. Currently Unavailable (if so equipped) 25. Intelligent Cruise Control (ICC) indica- 7. Release Parking Brake tors (if so equipped) 38. Unavailable Road is Slippery (if so equipped) 8. Low Fuel 26. Transmission Shift Position indicator 39. Rear Automatic Braking (RAB) indicator 9. Low Washer Fluid 27. Blind Spot Warning (BSW) and Rear (if so equipped) Cross Traffic Alert (RCTA) indicator (if so 10. Door/liftgate Open equipped) 40. Vehicle ahead detection indicator 11. -

Front and Rear Parking Sensor System
The specifications and features of the system, Terms & Conditions, Return Policy, and Warranty included in this User's Manual may be changed or updated at any time for any reasons without User’s Manual prior notice. Front and Rear Parking Sensor System 4 Front and 4 Rear In-Bumper Sensors Wired LED Display with Built-in Front Beeper and Separate Rear Beeper Model F4R4LX For Cars, Mini-VANs, 4X4s, SUVs, and Small Trucks (Vehicle Length Under 17 Feet) HY Technologies ● http://parkingsensors.net ISO9001 Copyright © 2009 HY Technologies ● Milpitas ● California ● USA All Rights Reserved Made In China HY Technologies ● http://parkingsensors.net Copyright © 2009 HY Technologies ● Milpitas ● California ● USA All Rights Reserved - 11 - Customer Service and Technical Support Front and Rear Parking Sensor System For customer service and technical support, visit our Web site as listed below, then click on the 4 Front and 4 Rear In-Bumper Sensors link Contact Us. Wired LED Display with Built-in Front Beeper and Separate Rear Beeper For Cars, Mini-VANs, 4X4s, SUVs, and Small Trucks Spare and Replacement Parts (Vehicle Length Under 17 Feet) To order spare and replacement parts for your system, visit our Web site as listed below, then click on the link Replacement Parts. Included in the Box ● 8x Sensors (in-bumper type) with attached ● 1x Control Box cable and 2-pin mini plug. Cable Length: ● 1x Double-Sided Self-Adhesive Pad with Front Sensor = 6.0m (19.6ft); Rear Sensor Velcro Attachment for affixing control box = 2.5m (8.2ft) to vehicle ● 1x LED Display with attached cable and ● 1x Power Cable for Control Box with five 8-pin plug. -

Multi-Information Display
Multi-Information Display Check VSA System Check Engine Oil Level Check Charging System If there is a problem with the vehicle If the engine oil is very low or has If you see ‘‘CHECK CHARGING stability assist (VSA) system, you lost pressure, you will see ‘‘CHECK SYSTEM’’ on the multi-information will see ‘‘CHECK VSA SYSTEM’’ on ENGINE OIL LEVEL’’ on the multi- display, it means the battery is not the multi-information display. If you information display. You will also see being charged. See page 409 for see this message, have the VSA the low oil pressure indicator in the more information. system checked by your dealer (see instrument panel flashing or staying page330 ). on. If you see this message, you should take immediate action since serious engine damage is possible. Follow the procedure on page 409 . 96 Multi-Information Display Check Emission System Check Brake System Check Transmission U.S. Instruments and Controls Canada If you see ‘‘CHECK EMISSION If there is a problem with the brake If there is a problem with the SYSTEM’’ on the multi-information system, you will see ‘‘CHECK automatic transmission, you will see display, it means one of the engine’s BRAKE SYSTEM’’ on the multi- ‘‘CHECK TRANSMISSION’’ on the emission systems may have a information display. The parking multi-information display. Avoid problem. Have your vehicle checked brake and brake system indicator in rapid acceleration, and have the by your dealer (see page 410 ). the instrument panel will also come transmission checked by a dealer as on. See page 411 for more soon as possible. -
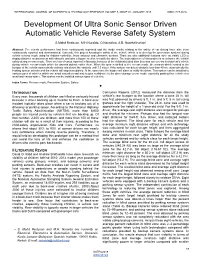
Development of Ultra Sonic Sensor Driven Automatic Vehicle Reverse Safety System
INTERNATIONAL JOURNAL OF SCIENTIFIC & TECHNOLOGY RESEARCH VOLUME 8, ISSUE 01, JANUARY 2019 ISSN 2277-8616 Development Of Ultra Sonic Sensor Driven Automatic Vehicle Reverse Safety System S.Mohd Redzuan, M.H.Nuraida, O.Norzalina, A.B. Noorhelinahani Abstract: The vehicle performance has been continuously improved and the study results relating to the safety of car driving have also been continuously reported and demonstrated. Currently, this project focusing in safety of the vehicle which is to develop the prevention systems during vehicle reverse mode using by Arduino controller, linear actuator and ultrasonic sensors. There are also additional features such as visible LCD to display distance measurement with obstacle and also a buzzer to alert or notify the driver. The main objective of this project is to enhance the vehicle safety during reverse mode. There are lots of cases reported in Malaysia because of the children(s) died after they was ran over by their parent’s vehicle during vehicle reverse mode which the parents did not notice them. When the gear is shifted to the reverse mode, the sensors which located at the bumper of the vehicle automatically activate and detect the obstacle until 3.5 meter. If the system can detect obstacle less than 40 cm, automatically the braking system activate and the vehicle will stop immediately. At the same time the buzzer will alarm to notify the driver. This system can be installed to various types of vehicles which can avoid casualties and also to give confidence to the driver during reverse mode especially parking their vehicle in a small and narrow space. -

Parking Sensor
CISBO Parking sensor CISBO RADER SYSTEM USER’S MANUAL Index ! TO USER --------------------------------------------------------------1 ! PART AND TECH DATA---------------------------------------------2 ! DISPLAY AND ALARM SOUND-----------------------------------3 ! INSTALLATION FOR 2&4 SENSORS-----------------------------4 ! INSTALLATION FOR 6&8 SENSORS-----------------------------5 ! INSTALLATION FOR WIRELESS TYPE--------------------------6 ! INSTALLATION FOR VIDEO TYPE-------------------------------7 ! INSTALLATION FOR REARVIEW MIRROR TYPE-------------8 ! POSITION FOR EACH PART------------------------- --------------9 ! DISPLAY & MAIN BOX INSTALLATION DIAGRAM----------10 ! SENSORS INSTALLATION DIAGRAM--------------------------11 ! NOTICE FOR USER-------------------------------------------------12 ! FUNCTIONS FOR LED DISPLAY SERIES-----------------------13 ! FUNCTIONS FOR LCD DISPLAY SERIES-----------------------14 ! FUNCTIONS FOR REARVIEW MIRROR SERIES---- ----------15 ! FUNCTIONS FOR VIDEO DISPLAY SERIES--------------------16 ! GUARANTEE FORM -----------------------------------------------17 TO USER Thank you for choosing and using our Parking Sensor products. We are going to provide you with the best products and the best services. In order to insure the best performance and avoid any false alarm or function failure, we strongly suggest that you read this user's manual carefully before installation and use. Parking Sensor System is a high technology product. It adopts ultrasonic wave sensors to measure the distance between your car -
2018 CX-9 Smart Start Guide
SMART START GUIDE M{ZD{CX-9 2940111_18a_CX-9_SSG_052617b.indd 2 5/26/17 11:24 AM This easy-to-use SMART START GUIDE provides important information about some unique features and functions of your new vehicle. Additional features are available at mymazda.com and the MyMazda app -> VEHICLE HOW TO. Complete information on features and functions is available in your Owner’s Manual. 2940111_18a_CX-9_SSG_052617b.indd 3 5/26/17 11:24 AM TABLE OF CONTENTS 2 Driver's View 4 Advanced Keyless Entry System 5 Starting the Engine 6 Tire Pressure Monitoring System 7 Multi-Information Display 8 Power Liftgate 9 Ambient Lights 10 Rear Seats 12 Seat Warmers 13 Heated Steering Wheel 14 MAZDA CONNECT Infotainment System 16 MAZDA CONNECT Settings 18 Bluetooth® 20 Navigation System 23 Active Driving Display 24 Commander Switch 25 Voice Control 26 Mazda Radar Cruise Control 28 Parking Sensor System 29 Advanced Smart City Brake Support 30 Smart City Brake Support 31 Smart Brake Support 32 Lane-keep Assist / Lane Departure Warning System 34 Distance Recognition Support System 35 Traffic Sign Recognition 36 Blind Spot Monitoring System 37 Rear Cross Traffic Alert 38 Lighting / Turn Signals 39 Wiper / Washer Control 40 Adaptive Front-lighting System 41 High Beam Control 42 Audio Controls 44 Audio USB and AUX Inputs 46 Automatic Climate Control 48 Instrument Cluster 50 Automatic Transmission 52 Auto-Dimming Mirror 53 HomeLink® 54 Electric Parking Brake 55 Sunshade 56 Personalize Your CX-9 m{zd{ CX-9 2940111_18a_CX-9_SSG_052617b.indd 4 5/26/17 11:24 AM DRIVER’S VIEW G A D I E H F B C 1 This indicator light turns on to remind you that the front passenger’s front/side airbags and seat belt pretensioner will not deploy during a collision. -

Instruction Manual
231HUD-F Head Up Display Parking Sensor 232HUDS-F Head Up Speed Display Parking Sensor 233HUDS-F Head Up Speed Display Instruction Manual Catalogue Installation Guide 1. Installation notice.......................................................................................................................13 2. System Wiring Diagram..............................................................................................................15 User's Guide 3. HUD screen power cable connection............................................................................................17 1. Introduction............................................................................................................................1 4. HUD screen installation..............................................................................................................18 2. Product character ....................................................................................................................2 5. Ultrasonic sensor installation......................................................................................................20 3. Using method..........................................................................................................................5 6. Control box connection...............................................................................................................22 4. Using notice............................................................................................................................7 -

Instruction Manual
Parking Sensor System CONTENT INTRODUCTION ……………… 1 INSTALLATION TOOLS ……………… 8 MODEL NUMBER ……………… 1 WHERE TO INSTALL ……………… 9 FEATURES ……………… 1 INSTALLATION PROCEDURE ……………… 9 TECHNICAL DATA ……………… 2 SENSOR INSTALLATION ……………… 10 PRODUCT COMPOSITION ……………… 3 POWERING UP ……………… 12 HOW TO USE PRECAUTIONS ……………… 13 SYSTEM STARTUP ……………… 3 TEST THE SYSTEM DIAGNOSTICS ……………… 3 TEST SUBJECTS ……………… 13 WARNING MODE ……………… 4 TEST METHODS ……………… 13 WARNING UNIT ……………… 6 SENSITIVITY ADJUSTMENT ……………… 14 ABOUT DETECTION ……………… 6 DISCLAIMER ……………… 15 PRECAUTIONS ……………… 8 TROUBLESHOOTING ……………… 15 INSTALLATION WARRANTY CARD ……………… 18 2011 Parking Sensor System ● INTRODUCTION caution during any vehicle operation. The BackZone™ Plus is a superior reverse parking ¨ Model number system that provides a visual and audible alarm when The model number and system description/features are close to large objects to aid the driver while parking in listed on the box. reverse. ¨ Features Read this manual thoroughly before installation and High sensitivity: Able to quickly detect large obstacles (car, operation of the system. Please pay attention to all of the wall, pole, etc.) up to 2.5M (98”) behind the vehicle. precautions and instructions listed in this manual. Sensitivity can be adjusted. Installation by trained professionals is recommended. Min. display distance: 28cm (approx. 11”). Minimum This manual describes the functions, installation, use and distance can be adjusted. precautions of the reverse parking system. Wide detection angle with minimal blind area. Designs and specifications are subject to change without Optional truck adaptor accessory kit containing a sensor prior notice and the diagrams or figures in this manual may extension harness and under-bumper mounting brackets differ slightly in appearance from the actual product. may be purchased separately. -

2020 Altima Sedan Owner's Manual
2020 ALTIMA SEDAN OWNER’S MANUAL and MAINTENANCE INFORMATION For your safety, read carefully and keep in this vehicle. Owner’s Manual Supplement The information contained within this supplement revises or adds to the following information within the 2019 Qashqai, 2020 Altima and 2020 Rogue Owner’s Manual: ∙ “WARNING AND INDICATOR LIGHTS” in the “Illustrated table of contents” section ∙ “WARNING LIGHTS, INDICATOR LIGHTS AND AUDIBLE REMINDERS” in the “Instruments and controls” section ∙ “WARNING LIGHTS” in the “WARNING LIGHTS, INDICATOR LIGHTS AND AUDIBLE REMINDERS” section in the “Instruments and controls” section ∙ “INDICATOR LIGHTS” in the “WARNING LIGHTS, INDICATOR LIGHTS AND AUDIBLE REMINDERS” section in the “Instruments and controls” section Read carefully and keep in vehicle. Printing: August 2019 Publication No. SU20EA 0T32U0 WARNING AND INDICATOR LIGHTS WARNING LIGHTS, INDICATOR LIGHTS AND AUDIBLE REMINDERS Brake warning 2 2. If the brake fluid level is correct, have Brake warning light (red) the warning system checked. It is rec- light (red) or ommended that you visit a NISSAN or dealer for this service. or Electronic parking brake warning light (yellow) (if so equipped) WARNING Electronic parking 3 ∙ Your brake system may not be work- ing properly if the warning light is on. brake warning WARNING LIGHTS Driving could be dangerous. If you or light (yellow) (if so or Brake warning judge it to be safe, drive carefully to equipped) light (red) the nearest service station for repairs. Otherwise, have your vehicle towed This light functions for both the parking because driving it could be brake and the foot brake systems. dangerous. Parking brake indicator (if so equipped) ∙ Pressing the brake pedal with the en- gine stopped and/or a low brake fluid When the ignition switch is placed in the ON level may increase your stopping dis- position, the light comes on when the park- tance and braking will require greater ing brake is applied.