Hydrologic Simulation Engine (HSE) User's Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In State Competition Islander Earns Awards Captfva Fire Victim*Bfficia
•'_•" ,'j»«W««""«"ii"J Volume 23, No. 29 Islander earns awards in state competition By Cindy Ouuxaeni In competition with JtilsQdar photography Florida weekly newspapers editor D^vid Meairdon with circulation sf mm received first olaiw honors than ' ifiOt, , The Iilwder hlnlhe liB2. Florida-Prefu earned; second place (or I Association BelW Weekly overall {graphic design and ^Newspaper Contest third place for a special Mcardon accepted his section. There .were more trward end two others-for than 1.900 entries from 83 •ni* Wander al a luncheon * In TaoiDo last week. continued page 2A Captfva fire victim*bfficia!Iy identified;, "1'T ' fiddly Identified as that of GebhardL Comparison A funeral mas* for D«vld Gefctiardt, who died of x-rays and cmnfirmaiionlhat articles or eloihing -earlierJlus month in a fire that destroyed a home found on Vvt body were those Gcbfcardt was and gjfcs'house on Cnptha, v/ns rondurted »t St wearing uhcrt last socn wre the bus's of U>p flnul Mary 3 Catholic Church In Mlddlcton, Ohio, on Jure fdenUf'tnllon Johnson said " - 13 1983 Sheriff Department Sgt David BonaaU, who has Gehnardl 25, lr sunnved bv his pnrprtr, Mr anil been asalitingin Ute inveatig^Uon of (he fire, called, Mrs Joseph Gchhanll of Middieton, five brothers tnc worst on Cdptlva n rran> yeans, &alJ tfw case ~ remains listed as a suspicicua fire x>l itndctcrmined At the timed his death Oebhardt was employed orl^lf. as assistant-manager of Barney's Incredible ••We have followed JJI leads brjt have not -been E&bJcs, a take-out dell on Santbel L able to -

New Zealand DX Times Monthly Journal of the D X New Zealand Radio DX League (Est 1948) D X April 2008 Volume 60 Number 6 LEAGUE LEAGUE
N.Z. RADIO N.Z. RADIO New Zealand DX Times Monthly Journal of the D X New Zealand Radio DX League (est 1948) D X April 2008 Volume 60 Number 6 LEAGUE http://www.radiodx.com LEAGUE Deadline for next issue is Wed 7th May 2008 . P.O. Box 39-596, Howick, Manukau 2145 CONTENTS FRONT COVER REGULAR COLUMNS Cover and partial page from 1948 Radio Bandwatch Under 9 3 Listeners Guide from League member with Ken Baird supplied by Dallas McKenzie Bandwatch Over 9 12 with Phil van de Paverd English in Time Order 16 with Yuri Muzyka Fcst SW Reception 19 Compiled by Mike Butler League 60th Anniversary Shortwave Report 20 with Ian Cattermole Thank you to Dallas McKenzie for the FM News and DX 24 with Adam Claydon front cover of the 1948 Radio Listeners TV and Satellite News 28 Guide used on this months DX Times with Adam Claydon Cover. Utilities 32 with Evan Murray If you have any similar material that you Combined Shortwave 34 think other members may be interested and Broadcast Mailbag in and may be suitable for publishing in with David Ricquish and Bryan Clark the DX Times please feel free to contact ADCOM News 45 me [email protected] with Bryan Clark Marketsquare 47 Branch News 48 Mark Nicholls with Chief Editor Chief Editor Ladders 51 with Stuart Forsyth OTHER CLOSING DATES FOR THE NEXT Tiwai Report 40 with Frank Glen 3 MONTHS (2008) Everglades Bandscan 42 You can send your contributions to the with Bruce Portzer NZ Radio DX League at AM Radio Lima 43 PO Box 39-596 On the Shortwaves 49 Howick compiled by Jerry Berg Manukau 2145 or use the email or postal addresses given by the section sub-editors. -
Sheigra Dxpedition Report
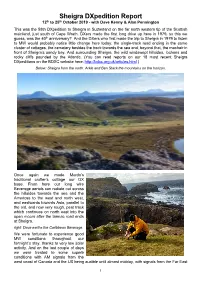
Sheigra DXpedition Report 12 th to 25 th October 2019 - with Dave Kenny & Alan Pennington This was the 58th DXpedition to Sheigra in Sutherland on the far north western tip of the Scottish mainland, just south of Cape Wrath. DXers made the first long drive up here in 1979, so this we guess, was the 40 th anniversary? And the DXers who first made the trip to Sheigra in 1979 to listen to MW would probably notice little change here today: the single-track road ending in the same cluster of cottages, the cemetery besides the track towards the sea and, beyond that, the machair in front of Sheigra’s sandy bay. And surrounding Sheigra, the wild windswept hillsides, lochans and rocky cliffs pounded by the Atlantic. (You can read reports on our 18 most recent Sheigra DXpeditions on the BDXC website here: http://bdxc.org.uk/articles.html ) Below: Sheigra from the north: Arkle and Ben Stack the mountains on the horizon. Once again we made Murdo’s traditional crofter’s cottage our DX base. From here our long wire Beverage aerials can radiate out across the hillsides towards the sea and the Americas to the west and north west, and eastwards towards Asia, parallel to the old, and now very rough, peat track which continues on north east into the open moors after the tarmac road ends at Sheigra. right: Dave earths the Caribbean Beverage. We were fortunate to experience good MW conditions throughout our fortnight’s stay, thanks to very low solar activity. And on the last couple of days we were treated to some superb conditions with AM signals from the -

Exploring the Atom's Anti-World! White's Radio, Log 4 Am -Fm- Stations World -Wide Snort -Wave Listings
EXPLORING THE ATOM'S ANTI-WORLD! WHITE'S RADIO, LOG 4 AM -FM- STATIONS WORLD -WIDE SNORT -WAVE LISTINGS WASHINGTON TO MOSCOW WORLD WEATHER LINK! Command Receive Power Supply Transistor TRF Amplifier Stage TEST REPORTS: H. H. Scott LK -60 80 -watt Stereo Amplifier Kit Lafayette HB -600 CB /Business Band $10 AEROBAND Solid -State Tranceiver CONVERTER 4 TUNE YOUR "RANSISTOR RADIO TO AIRCRAFT, CONTROL TLWERS! www.americanradiohistory.com PACE KEEP WITH SPACE AGE! SEE MANNED MOON SHOTS, SPACE FLIGHTS, CLOSE -UP! ANAZINC SCIENCE BUYS . for FUN, STUDY or PROFIT See the Stars, Moon. Planets Close Up! SOLVE PROBLEMS! TELL FORTUNES! PLAY GAMES! 3" ASTRONOMICAL REFLECTING TELESCOPE NEW WORKING MODEL DIGITAL COMPUTER i Photographers) Adapt your camera to this Scope for ex- ACTUAL MINIATURE VERSION cellent Telephoto shots and fascinating photos of moon! OF GIANT ELECTRONIC BRAINS Fascinating new see -through model compute 60 TO 180 POWER! Famous actually solves problems, teaches computer Mt. Palomar Typel An Unusual Buyl fundamentals. Adds, subtracts, multiplies. See the Rings of Saturn, the fascinating planet shifts, complements, carries, memorizes, counts. Mars, huge craters on the Moon, phases of Venus. compares, sequences. Attractively colored, rigid Equat rial Mount with lock both axes. Alum- plastic parts easily assembled. 12" x 31/2 x inized overcoated 43/4 ". Incl. step -by -step assembly 3" diameter high -speed 32 -page instruction book diagrams. ma o raro Telescope equipped with a 60X (binary covering operation, computer language eyepiece and a mounted Barlow Lens. Optical system), programming, problems and 15 experiments. Finder Telescope included. Hardwood, portable Stock No. 70,683 -HP $5.98 Postpaid tripod. -

SHEIGRA DXPEDITION REPORT 1-14 October 2011 - with Dave Kenny & Alan Pennington
BRITISH DX CLUB - SHEIGRA DXPEDITION REPORT 1-14 October 2011 - with Dave Kenny & Alan Pennington Receivers Alan Pennington AOR AR 7030 Plus and Palstar pre-amp Dave Kenny AOR AR 7030 Plus and tuneable pre-amp Aerials (long-wire beverages use 7-strand 0.2mm wire supported on 4-5ft bamboo canes) 45 degrees 620m beverage - terminated Far East 90 degrees 500m beverage - unterminated Mid East & Asia (Americas off the back) 170 degrees 450m beverage – terminated Africa & UK LPAMs 305 degrees 600m beverage – terminated North America Wellbrook ALA1530 loop for general reception – mainly shortwave Below : Sheigra from two thirds up the 170° Africa & UK beverage – DX cottage in foreground on right Dxpedition Report This was the 52nd DXpedition to Sheigra, the first being back in October 1985. It is the seventh time we have stayed in Mary’s cottage in the far north-west corner of the Scottish mainland (the original DX holiday cottage used from 1985 to 2001 sadly still stands empty and unoccupied after 10 years). The weather was mild and sunny for the first two days, a pleasant relief from the heatwave further south, but then it turned very windy with heavy showers, the strong gusts proved a challenge, snapping our African aerial on top of the hill. The second week was mostly dry and mild with a couple of glorious sunny days. There were a lot of sheep around but apart from occasionally bumping into the canes they did not cause any problems. Deer attack! After all the problems with deer on our last visit in 2009 we were rather reluctant to put up a North American wire this time (it extends over the distant hills where the deer tend to roam at night) intending to use the loop instead, but that proved noisy on MW so we decided to run out the 1 beverage after all. -

Who Pays SX Q3 2019.Xlsx
Who Pays SoundExchange: Q3 2019 Entity Name License Type AMBIANCERADIO.COM BES Aura Multimedia Corporation BES CLOUDCOVERMUSIC.COM BES COROHEALTH.COM BES CUSTOMCHANNELS.NET (BES) BES DMX Music BES F45 Training Incorporated BES GRAYV.COM BES Imagesound Limited BES INSTOREAUDIONETWORK.COM BES IO BUSINESS MUSIC BES It's Never 2 Late BES Jukeboxy BES MANAGEDMEDIA.COM BES MIXHITS.COM BES MTI Digital Inc - MTIDIGITAL.BIZ BES Music Choice BES Music Maestro BES Music Performance Rights Agency, Inc. BES MUZAK.COM BES NEXTUNE.COM BES Play More Music International BES Private Label Radio BES Qsic BES RETAIL ENTERTAINMENT DESIGN BES Rfc Media - Bes BES Rise Radio BES Rockbot, Inc. BES Sirius XM Radio, Inc BES SOUND-MACHINE.COM BES Startle International Inc. BES Stingray Business BES Stingray Music USA BES STUDIOSTREAM.COM BES Thales Inflyt Experience BES UMIXMEDIA.COM BES Vibenomics, Inc. BES Sirius XM Radio, Inc CABSAT Stingray Music USA CABSAT Music Choice PES MUZAK.COM PES Sirius XM Radio, Inc Satellite Radio #1 Gospel Hip Hop Webcasting 102.7 FM KPGZ-lp Webcasting 411OUT LLC Webcasting 630 Inc Webcasting A-1 Communications Webcasting ACCURADIO.COM Webcasting Ad Astra Radio Webcasting AD VENTURE MARKETING DBA TOWN TALK RADIO Webcasting Adams Radio Group Webcasting ADDICTEDTORADIO.COM Webcasting africana55radio.com Webcasting AGM Bakersfield Webcasting Agm California - San Luis Obispo Webcasting AGM Nevada, LLC Webcasting Agm Santa Maria, L.P. Webcasting Aloha Station Trust Webcasting Alpha Media - Alaska Webcasting Alpha Media - Amarillo Webcasting -

Federal Aviation Agency
FEDERAL REGISTER VOLUME 30 • NUMBER 117 Friday, June 18,1965 • Washington, D.C. Pages 7863-7938 Agencies in this issue— Agricultural Research Service Area Redevelopment Administration Atomic Energy Commission Civil Aeronautics Board Civil Service Commission Consumer and Marketing Service Federal Aviation Agency Federal Communications Commission Federal Maritime Commission Federal Trade Commission Food and Drug Administration Interstate Commerce Commission Land Management Bureau Securities and Exchange Commission Detailed list of Contents appears inside. Subscriptions Now Being Accepted S L I P L A W S 89th Congress, 1st Session 1965 Separate prints of Public Laws, published immediately after enactment, with marginal annotations and legislative history references. Subscription Price: $12.00 per Session Published by Office of the Federal Register, National Archives and Records Service, General Services Administration Order from Superintendent of Documents, U.S. Government Printing Office, Washington, D.C.,' 20402 Published dally, Tuesday through Saturday (no publication on Sundays, Monday», or FEDERAL®REGISTER on the day after an official Federal holiday), by the Office of the Federal Register, National Area Code 202 Phone 963-3261 A1®1117®8 a n d R ecords Service, G eneral Services A d m in istra tio n (m ail address Nations _ . , _ _ Archives Building, Washington, D.C. 20408), p u r s u a n t to the authority contained in tne Federal Register Act, approved July 26, 1935 (49 Stat. 500, as amended; 44 U.S.C., ch. 8B), under regulations prescribed by the Admin istrative Committee of the Federal Register, approved by the President (1 CFR Ch. I). Distribution is made only by the Superintendent or Documents, Government Printing Office, Washington, D.C. -
Licensee Count Q1 2019.Xlsx
Who Pays SoundExchange: Q1 2019 Entity Name License Type Aura Multimedia Corporation BES CLOUDCOVERMUSIC.COM BES COROHEALTH.COM BES CUSTOMCHANNELS.NET (BES) BES DMX Music BES GRAYV.COM BES Imagesound Limited BES INSTOREAUDIONETWORK.COM BES IO BUSINESS MUSIC BES It'S Never 2 Late BES MTI Digital Inc - MTIDIGITAL.BIZ BES Music Choice BES MUZAK.COM BES Private Label Radio BES Qsic BES RETAIL ENTERTAINMENT DESIGN BES Rfc Media - Bes BES Rise Radio BES Rockbot, Inc. BES Sirius XM Radio, Inc BES SOUND-MACHINE.COM BES Stingray Business BES Stingray Music USA BES STUDIOSTREAM.COM BES Thales Inflyt Experience BES UMIXMEDIA.COM BES Vibenomics, Inc. BES Sirius XM Radio, Inc CABSAT Stingray Music USA CABSAT Music Choice PES MUZAK.COM PES Sirius XM Radio, Inc Satellite Radio 102.7 FM KPGZ-lp Webcasting 999HANKFM - WANK Webcasting A-1 Communications Webcasting ACCURADIO.COM Webcasting Ad Astra Radio Webcasting Adams Radio Group Webcasting ADDICTEDTORADIO.COM Webcasting Aloha Station Trust Webcasting Alpha Media - Alaska Webcasting Alpha Media - Amarillo Webcasting Alpha Media - Aurora Webcasting Alpha Media - Austin-Albert Lea Webcasting Alpha Media - Bakersfield Webcasting Alpha Media - Biloxi - Gulfport, MS Webcasting Alpha Media - Brookings Webcasting Alpha Media - Cameron - Bethany Webcasting Alpha Media - Canton Webcasting Alpha Media - Columbia, SC Webcasting Alpha Media - Columbus Webcasting Alpha Media - Dayton, Oh Webcasting Alpha Media - East Texas Webcasting Alpha Media - Fairfield Webcasting Alpha Media - Far East Bay Webcasting Alpha Media -

Suffolk County Solid Waste Management Report and Recommendations Table of Contents
SUFFOLK COUNTY SOLID WASTE MANAGEMENT REPORT AND RECOMMENDATIONS TABLE OF CONTENTS 1. Introduction 2 2. Synopsis of Suffolk County Law 5 3. Members of the Commission 6 4. Recommendations 8 5. Evolution of Waste Management on Long Island 10 6. New York State Regulations 14 7. Current Conditions for Waste Disposal in Suffolk County 30 8. Transportation Issues and Solid Waste 78 9. Alternative Technologies 101 10. Waste Reduction and Recycling 120 11. Yard Waste 130 2 Introduction While many people do not like to think about what happens to household refuse once it leaves their curb or they drive it to the local transfer station, Long Island faces a mounting crisis over what to do with the things we throw away. The average Long Islander produces nearly four pounds of garbage each day, not including yard waste or recyclables. Traditionally, disposal has been a function of town governments, which have operated landfills to receive household garbage. However, since a New York State law ordered all Long Island landfills closed by the year 1990, Long Islanders have had to find alternative ways of disposing of their garbage. Currently, about 35 percent of the waste stream is consumed at one of the Island’s four waste-to-energy facilities. The remaining portion, about 1.1 million tons, is transported by truck to landfills in states such as Ohio, Pennsylvania, and Virginia at rates approaching $100 per ton. The practice of long haul trucking comes at an enormous price tag which is reflected in Long Island’s property tax bills or transfer station fees or bag fees in several eastern Suffolk Towns. -

October DXT 12
N.Z. RADIO New Zealand DX Times N.Z. RADIO Monthly journal of the D X New Zealand Radio DX League (est. 1948) D X October 2001 - Volume 53 Number 12 LEAGUE http://radiodx.com LEAGUE Station Profile - Radio New Zealand International Radio New Zealand International ‘Our station’ ‘Our Voice’. Started in 1948 when the then Prime Minister Peter Fraser said it’s objective was to “Present an accurate picture of life in New Zealand to people abroad”. Broadcasting commenced using 7.5 kw transmitters located at Titahi Bay (just north of Wellington). Over the years the Shortwave broadcasts underwent several changes, until 1982 when the Government subsidy was cut and most special shortwave programmes were stopped. It was not until after the first coup in Fiji in 1988 that people began to realise that we had an ineffective voice in the Pacific. On Wednesday the 24th January 1990 the old transmitters at Titahi Bay were closed and the new and current transmitters came into use.(See page 2 for photograph of the Rangitaiki transmitter site. Radio New Zealand International is currently funded by the Ministry of Foreign Affairs and Trade . Radio New Zealand International Aerials TH581 with hypervapotron cooling and one RNZI operates two high frequency and two TH581 with air cooling. The station broadcasts low band aerials. 15 hours a day, and the frequency is changed Radio New Zealand International Transmitter at intervals so as to The transmitter is sited at Rangitaiki, 41km maintain a strong east of Taupo in the centre of the North Island of New Zealand. -

FM-1949-07.Pdf
MM partl DIRECTORY BY OPL, SYSTEMS COUNTY U POLICE 1S1pP,TE FIRE FORESTRYOpSp `p` O COMPANIES TO REVISED LISTINGS 1, 1949 4/ka feeZ means IessJnterference ... AT HEADQUARTERS THE NEW RCA STATION RECEIVER Type CR -9A (152 -174 Mc) ON THE ROAD THE NEW RCA CARFONE Mobile 2 -way FM radio, 152 -174 Mc ...you get the greatest selectivity with RCA's All -New Communication Equipment You're going to hear a lot about selectivity from potentially useful channels for mobile radio communi- now on. In communication systems, receiver selectiv- cation systems. ity, more than any other single factor, determines the For degree of freedom from interference. complete details on the new RCA Station Re- This is impor- ceiver type CR -9A, tant both for today and for the future. and the new RCA CARFONE for mobile use, write today. RCA engineers are at your Recognizing this fact, RCA has taken the necessary service for consultation on prob- steps to make its all -new communication equipment lems of coverage, usage, or com- the most selective of any on the market today. To the plex systems installations. Write user, this means reliable operation substantially free Dept. 38 C. from interference. In addition, this greater selectivity Free literature on RCA's All -New now rhakes adjacent -channel operation a practical Communication Equipment -yours possibility - thereby greatly increasing the number of for the asking. COMMUN /CAT/ON SECT/ON RADIO CORPORATION of AMERICA ENGINEERING PRODUCTS DEPARTMENT, CAMDEN, N.J. In Canada: R C A VICTOR Company limited, Montreal Á#ofher s with 8(11(011' DlNews ERIE'S FIRST TV STATION Says EDWARD LAMB, publisher of "The Erie Dis- telecasting economics. -

Leader '%.• the Leading Ano Most Widely Cikcvlatuweekly Newspaper in Union County
LEADER '%.• THE LEADING ANO MOST WIDELY CIKCVLATUWEEKLY NEWSPAPER IN UNION COUNTY TIETH YEAM—No, 3 Post Office, WestfleM, N. J. WESTFIELD, NEW JERSEY, THURSDAY, SEPTEMBER 29, 1949 Publish** Polio Cases , WeMfieUT* United Campmgn DhUunud Manager* Ml Register for Piano Concert Here Firctimnof To Benefit CCH Methodist Church Thursday Adult School Building Fund Plans Anniversary Renui« in Enrollment May Virginia Ackerntaa, Q at Be Made Opening , Wertf ield Artirt, Mark. Churrh Founding in 1849$ M.kkoberg Night Oct. 10 To Play Ott. 26 U»U October Centennial Event* Wit* no new polio esses reported A total of 400 persons register- Under the sponsorship of the The 100th anniversary of Methodism in Westfleld will be «li> i WeBtfteld since Thursday, th* ered for the fall semester of the Senior Auxiliary to the board of brated in October by' the congregation of the First Mtthodiit Chunk. Lue appeared today to be on Weatfield Adult School in the cafe- manageri of the Children's Coun- Starting with a communion service Sunday at 11 a. m. and clsalMg ecline aft"' claiming 16 West- teria of Roosevelt Junior High try Home, Virginia Ackerman, with a relifioui motion picture on Sunday, Oct. 30 at 8 p. m., tM rfd and **>'* th"n 1'<m New School Monday night. During the concert pianist and teacher, will centennial celebration will feature many events of unusual inteiwt previous week another 400 peo- present a piano concert Oct. 26 at and' variety. Six gutBt sptakon \sum ti quarantine at Muhlen. ple had registered by mail, bring- "8:30 p. m. in Rooaevelt Junior Centennial Speaker are scheduled to be heard at •pe- JrVHwpiUl, Flainfleld, arc John ing the present registration for High School.