X86 Assembly
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Automatic Extraction of X86 Formal Semantics from Its Natural Language Description
Automatic extraction of x86 formal semantics from its natural language description NGUYEN, Lam Hoang Yen Graduate School of Advanced Science and Technology Japan Advanced Institute of Science and Technology March, 2018 Master's Thesis Automatic extraction of x86 formal semantics from its natural language description 1610062 NGUYEN, Lam Hoang Yen Supervisor : Professor Mizuhito Ogawa Main Examiner : Professor Mizuhito Ogawa Examiners : Associate Professor Nguyen Minh Le Professor Kazuhiro Ogata Associate Professor Nao Hirokawa Graduate School of Advanced Science and Technology Japan Advanced Institute of Science and Technology [Information Science] February, 2018 Abstract Nowadays, computers have become an essential device of almost every activity for every- body at any age. From personal demands to industrial and business sectors, they are used to improve human life as well as the efficiency and the productivity. The more important they are, the more attractive target they become for being attacked and serving malicious purposes. There are various threats to a computer system. One of the most common manners that penetrates or damages a system with bad impacts to most of the computer users is malware. Malware detection and malware classification are two of the most at- tractive problems in not only industry area but also academic research. The bits-based fingerprint also known as the signature-based pattern recognition is applied popularly in commercial anti-virus software due to its light-weight and fast features. However, it is easily cheated by advanced polymorphic techniques in malware. Therefore, malware analyses based on control flow graph (CFG) have been attracting a lot of attention, e.g., VxClass at Google. -

1 Assembly Language Programming Status Flags the Status Flags Reflect the Outcomes of Arithmetic and Logical Operations Performe
Assembly Language Programming Status Flags The status flags reflect the outcomes of arithmetic and logical operations performed by the CPU. • The carry flag (CF) is set when the result of an unsigned arithmetic operation is too large to fit into the destination. • The overflow flag (OF) is set when the result of a signed arithmetic operation is too large or too small to fit into the destination. • The sign flag (SF) is set when the result of an arithmetic or logical operation generates a negative result. • The zero flag (ZF) is set when the result of an arithmetic or logical operation generates a result of zero. Assembly Programs We are going to run assembly programs from (http://www.kipirvine.com/asm/) using Visual Studio. I have downloaded all of the example programs and placed them in CS430 Pub. Copy them onto your local machine and start up Visual Studio. The first program we are going to run is below. Copy this into the Project_Sample project in the examples folder. Run the program. Let’s talk about what this program does. TITLE Add and Subtract ; This program ; Last update: 06/01/2006 INCLUDE Irvine32.inc .code main PROC mov eax,10000h add eax,40000h sub eax,20000h call DumpRegs exit main ENDP END main 1 What’s the difference between the previous program and this one: TITLE Add and Subtract, Version 2 (AddSub2.asm) ; This program adds and subtracts 32-bit integers ; and stores the sum in a variable. ; Last update: 06/01/2006 INCLUDE Irvine32.inc .data val1 dword 10000h val2 dword 40000h val3 dword 20000h finalVal dword ? .code main PROC mov eax,val1 ; start with 10000h add eax,val2 ; add 40000h sub eax,val3 ; subtract 20000h mov finalVal,eax ; store the result (30000h) call DumpRegs ; display the registers exit main ENDP END main Data Transfer Instructions The MOV instruction copies from a source operand to a destination operand. -

Lecture Notes in Assembly Language
Lecture Notes in Assembly Language Short introduction to low-level programming Piotr Fulmański Łódź, 12 czerwca 2015 Spis treści Spis treści iii 1 Before we begin1 1.1 Simple assembler.................................... 1 1.1.1 Excercise 1 ................................... 2 1.1.2 Excercise 2 ................................... 3 1.1.3 Excercise 3 ................................... 3 1.1.4 Excercise 4 ................................... 5 1.1.5 Excercise 5 ................................... 6 1.2 Improvements, part I: addressing........................... 8 1.2.1 Excercise 6 ................................... 11 1.3 Improvements, part II: indirect addressing...................... 11 1.4 Improvements, part III: labels............................. 18 1.4.1 Excercise 7: find substring in a string .................... 19 1.4.2 Excercise 8: improved polynomial....................... 21 1.5 Improvements, part IV: flag register ......................... 23 1.6 Improvements, part V: the stack ........................... 24 1.6.1 Excercise 12................................... 26 1.7 Improvements, part VI – function stack frame.................... 29 1.8 Finall excercises..................................... 34 1.8.1 Excercise 13................................... 34 1.8.2 Excercise 14................................... 34 1.8.3 Excercise 15................................... 34 1.8.4 Excercise 16................................... 34 iii iv SPIS TREŚCI 1.8.5 Excercise 17................................... 34 2 First program 37 2.1 Compiling, -

ARM Instruction Set
4 ARM Instruction Set This chapter describes the ARM instruction set. 4.1 Instruction Set Summary 4-2 4.2 The Condition Field 4-5 4.3 Branch and Exchange (BX) 4-6 4.4 Branch and Branch with Link (B, BL) 4-8 4.5 Data Processing 4-10 4.6 PSR Transfer (MRS, MSR) 4-17 4.7 Multiply and Multiply-Accumulate (MUL, MLA) 4-22 4.8 Multiply Long and Multiply-Accumulate Long (MULL,MLAL) 4-24 4.9 Single Data Transfer (LDR, STR) 4-26 4.10 Halfword and Signed Data Transfer 4-32 4.11 Block Data Transfer (LDM, STM) 4-37 4.12 Single Data Swap (SWP) 4-43 4.13 Software Interrupt (SWI) 4-45 4.14 Coprocessor Data Operations (CDP) 4-47 4.15 Coprocessor Data Transfers (LDC, STC) 4-49 4.16 Coprocessor Register Transfers (MRC, MCR) 4-53 4.17 Undefined Instruction 4-55 4.18 Instruction Set Examples 4-56 ARM7TDMI-S Data Sheet 4-1 ARM DDI 0084D Final - Open Access ARM Instruction Set 4.1 Instruction Set Summary 4.1.1 Format summary The ARM instruction set formats are shown below. 3 3 2 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 9876543210 1 0 9 8 7 6 5 4 3 2 1 0 9 8 7 6 5 4 3 2 1 0 Cond 0 0 I Opcode S Rn Rd Operand 2 Data Processing / PSR Transfer Cond 0 0 0 0 0 0 A S Rd Rn Rs 1 0 0 1 Rm Multiply Cond 0 0 0 0 1 U A S RdHi RdLo Rn 1 0 0 1 Rm Multiply Long Cond 0 0 0 1 0 B 0 0 Rn Rd 0 0 0 0 1 0 0 1 Rm Single Data Swap Cond 0 0 0 1 0 0 1 0 1 1 1 1 1 1 1 1 1 1 1 1 0 0 0 1 Rn Branch and Exchange Cond 0 0 0 P U 0 W L Rn Rd 0 0 0 0 1 S H 1 Rm Halfword Data Transfer: register offset Cond 0 0 0 P U 1 W L Rn Rd Offset 1 S H 1 Offset Halfword Data Transfer: immediate offset Cond 0 -

SYSCALL, IRET ● Opportunistic SYSRET Failed, Do IRET
entry_*.S A carefree stroll through kernel entry code Borislav Petkov SUSE Labs [email protected] Reasons for entry into the kernel ● System calls (64-bit, compat, 32-bit) ● Interrupts (NMIs, APIC, timer, IPIs... ) – software: INT 0x0-0xFF, INT3, … – external (hw-generated): CPU-ext logic, async to insn exec ● Architectural exceptions (sync vs async) – faults: precise, reported before faulting insn => restartable (#GP,#PF) – traps: precise, reported after trapping insn (#BP,#DB-both) – aborts: imprecise, not reliably restartable (#MC, unless MCG_STATUS.RIPV) 2 Intr/Ex entry ● IDT, int num index into it (256 vectors); all modes need an IDT ● If handler has a higher CPL, switch stacks ● A picture is always better: 3 45sec guide to Segmentation ● Continuous range at an arbitrary position in VA space ● Segments described by segment descriptors ● … selected by segment selectors ● … by indexing into segment descriptor tables (GDT,LDT,IDT,...) ● … and loaded by the hw into segment registers: – user: CS,DS,{E,F,G}S,SS – system: GDTR,LDTR,IDTR,TR (TSS) 4 A couple more seconds of Segmentation ● L (bit 21) new long mode attr: 1=long mode, 0=compat mode ● D (bit 22): default operand and address sizes ● legacy: D=1b – 32bit, D=0b – 16bit ● long mode: D=0b – 32-bit, L=1,D=1 reserved for future use ● G (bit 23): granularity: G=1b: seg limit scaled by 4K ● DPL: Descriptor Privilege Level of the segment 5 Legacy syscalls ● Call OS through gate descriptor (call, intr, trap or task gate) ● Overhead due to segment-based protection: – load new selector + desc into -

Microprocessor's Registers
IT Basics The microprocessor and ASM Prof. Răzvan Daniel Zota, Ph.D. Bucharest University of Economic Studies Faculty of Cybernetics, Statistics and Economic Informatics [email protected] http://zota.ase.ro/itb Contents • Basic microprocessor architecture • Intel microprocessor registers • Instructions – their components and format • Addressing modes (with examples) 2 Basic microprocessor architecture • CPU registers – Special memory locations on the microprocessor chip – Examples: accumulator, counter, FLAGS register • Arithmetic-Logic Unit (ALU) – The place where most of the operations are being made inside the CPU • Bus Interface Unit (BIU) – It controls data and address buses when the main memory is accessed (or data from the cache memory) • Control Unit and instruction set – The CPU has a fixed instruction set for working with (examples: MOV, CMP, JMP) 3 Instruction’s processing • Processing an instruction requires 3 basic steps: 1. Fetching the instruction from memory (fetch) 2. Instruction’s decoding (decode) 3. Instruction’s execution (execute) – implies memory access for the operands and storing the result • Operation mode of an “antique” Intel 8086 Fetch Decode Execute Fetch Decode Execute …... Microprocessor 1 1 1 2 2 2 Busy Idle Busy Busy Idle Busy …... Bus 4 Instruction’s processing • Modern microprocessors may process more instructions simultaneously (pipelining) • Operation of a pipeline microprocessor (from Intel 80486 to our days) Fetch Fetch Fetch Fetch Store Fetch Fetch Read Fetch 1 2 3 4 1 5 6 2 7 Bus Unit Decode Decode -

X86 Assembly Language Syllabus for Subject: Assembly (Machine) Language
VŠB - Technical University of Ostrava Department of Computer Science, FEECS x86 Assembly Language Syllabus for Subject: Assembly (Machine) Language Ing. Petr Olivka, Ph.D. 2021 e-mail: [email protected] http://poli.cs.vsb.cz Contents 1 Processor Intel i486 and Higher – 32-bit Mode3 1.1 Registers of i486.........................3 1.2 Addressing............................6 1.3 Assembly Language, Machine Code...............6 1.4 Data Types............................6 2 Linking Assembly and C Language Programs7 2.1 Linking C and C Module....................7 2.2 Linking C and ASM Module................... 10 2.3 Variables in Assembly Language................ 11 3 Instruction Set 14 3.1 Moving Instruction........................ 14 3.2 Logical and Bitwise Instruction................. 16 3.3 Arithmetical Instruction..................... 18 3.4 Jump Instructions........................ 20 3.5 String Instructions........................ 21 3.6 Control and Auxiliary Instructions............... 23 3.7 Multiplication and Division Instructions............ 24 4 32-bit Interfacing to C Language 25 4.1 Return Values from Functions.................. 25 4.2 Rules of Registers Usage..................... 25 4.3 Calling Function with Arguments................ 26 4.3.1 Order of Passed Arguments............... 26 4.3.2 Calling the Function and Set Register EBP...... 27 4.3.3 Access to Arguments and Local Variables....... 28 4.3.4 Return from Function, the Stack Cleanup....... 28 4.3.5 Function Example.................... 29 4.4 Typical Examples of Arguments Passed to Functions..... 30 4.5 The Example of Using String Instructions........... 34 5 AMD and Intel x86 Processors – 64-bit Mode 36 5.1 Registers.............................. 36 5.2 Addressing in 64-bit Mode.................... 37 6 64-bit Interfacing to C Language 37 6.1 Return Values.......................... -

Towards Scalable Multiprocessor Virtual Machines
USENIX Association Proceedings of the Third Virtual Machine Research and Technology Symposium San Jose, CA, USA May 6–7, 2004 © 2004 by The USENIX Association All Rights Reserved For more information about the USENIX Association: Phone: 1 510 528 8649 FAX: 1 510 548 5738 Email: [email protected] WWW: http://www.usenix.org Rights to individual papers remain with the author or the author's employer. Permission is granted for noncommercial reproduction of the work for educational or research purposes. This copyright notice must be included in the reproduced paper. USENIX acknowledges all trademarks herein. Towards Scalable Multiprocessor Virtual Machines Volkmar Uhlig Joshua LeVasseur Espen Skoglund Uwe Dannowski System Architecture Group Universitat¨ Karlsruhe [email protected] Abstract of guests, such that they only ever access a fraction of the physical processors, or alternatively time-multiplex A multiprocessor virtual machine benefits its guest guests across a set of physical processors to, e.g., ac- operating system in supporting scalable job throughput commodate for spikes in guest OS workloads. It can and request latency—useful properties in server consol- also map guest operating systems to virtual processors idation where servers require several of the system pro- (which can exceed the number of physical processors), cessors for steady state or to handle load bursts. and migrate between physical processors without no- Typical operating systems, optimized for multipro- tifying the guest operating systems. This allows for, cessor systems in their use of spin-locks for critical sec- e.g., migration to other machine configurations or hot- tions, can defeat flexible virtual machine scheduling due swapping of CPUs without adequate support from the to lock-holder preemption and misbalanced load. -

GF-6, PC-11 and Dexos1™: New Engine Oil Specifications Mean New Additive Challenges
TECH BEAT Dr. Neil Canter / Contributing Editor SPECIAL REPORT GF-6, PC-11 ™ and dexos1 : New engine oil specifications mean new additive challenges Additive suppliers will need to develop new additives and KKEKEYY COCONCEPTSNC TS formulation approaches to • ThThee iimplementationp of ttwowo subcategoriessubcategories in thethe uppcocomcomiing GFGF-66 sppececificaecificationificatioonn forfor PCPCMOsCMOs meet specification deadlines. meanmeanss tthathat additivadditivee formulations maymay neeneedd ttoo be ddesidesignedggned differentldifferentlyy for GF-6GF-6 A anaandd GFGF-6- 6B.B • FoFor tthe new HDEOO sspecificaspecification,pecificationon, PCPC-1C-11,, the newnew llowero e viscosityviscosity oiloil subcategory,ssubcategory, PC-1PC-11B THE LUBRICANTS INDUSTRY IS IN THE MIDST OF DEVELOPING PROD- representts a significantsignificant challengechallenge because of UCTS for not one but three new engine oil specifications at the thethe poppotentialotetennttial neneedeed tot inincorincorporatecorpporaatte newneneeww frictionfrfricictition same time. Further complicating the issue—two of the speci- moddifieerss witth more eeffeecttive aanttiweear addddittivees.. fications are further organized into specific subcategories. • ImImplementationplementation of tthehe secosecondnd ggenerationeneration With passenger car motor oils (PCMOs), the new speci- fication is known as GF-6.1 It is further segmented into two GM specificaecificationtion, ddexos1™exos1™ priioor to GGF-6F-6 mamayy subcategories: GF-6A and GF-6B. GF-6A will cover existing requirei e thethe lullubricantsububricantbric ca tss iniindustryndustrdu tryy to reformulaterereformulatrmul te engine oil grades while GF-6B will cover new grades with PPCMOsCMOs again. viscosities lower than 0W-20. The impetus for the new grade comes from the request by automotive manufacturers to rec- 10 The heart is typically the size of a fist: 12 cm (5 inches) in length, 8 cm (3.5 inches) wide and 6 cm (2.5 inches) new lower viscosity engine oils with an HTHS of 2.9-3.2. -

Owners Manual
20_CHEV_Camaro_COV_en_US_84295534A_2019MAY23.ai 1 4/11/2019 1:49:04 PM 2020 2020 C M Y CM MY CY CMY K 84295534 A Chevrolet Camaro Owner Manual (GMNA-Localizing-U.S./Canada/Mexico- 13556304) - 2020 - CRC - 5/10/19 Contents Introduction . 2 Keys, Doors, and Windows . 7 Seats and Restraints . 41 Storage . 89 Instruments and Controls . 91 Lighting . 130 Infotainment System . 137 Climate Controls . 143 Driving and Operating . 152 Vehicle Care . 219 Service and Maintenance . 304 Technical Data . 320 Customer Information . 325 Reporting Safety Defects . 335 OnStar . 339 Connected Services . 347 Index . 350 Chevrolet Camaro Owner Manual (GMNA-Localizing-U.S./Canada/Mexico- 13556304) - 2020 - CRC - 5/10/19 2 Introduction Introduction This manual describes features that Helm, Incorporated may or may not be on the vehicle Attention: Customer Service because of optional equipment that 47911 Halyard Drive was not purchased on the vehicle, Plymouth, MI 48170 model variants, country USA specifications, features/applications that may not be available in your Using this Manual region, or changes subsequent to To quickly locate information about the printing of this owner’s manual. the vehicle, use the Index in the The names, logos, emblems, Refer to the purchase back of the manual. It is an slogans, vehicle model names, and documentation relating to your alphabetical list of what is in the vehicle body designs appearing in specific vehicle to confirm the manual and the page number where this manual including, but not limited features. it can be found. to, GM, the GM logo, CHEVROLET, the CHEVROLET Emblem, Keep this manual in the vehicle for CAMARO, and the CAMARO quick reference. -

Asmc Macro Assembler Reference Asmc Macro Assembler Reference
Asmc Macro Assembler Reference Asmc Macro Assembler Reference This document lists some of the differences between Asmc, JWasm, and Masm. In This Section Asmc Command-Line Option Describes the Asmc command-line option. Asmc Error Messages Describes Asmc fatal and nonfatal error messages and warnings. Asmc Extensions Provides links to topics discussing Masm versus Asmc. Directives Reference Provides links to topics discussing the use of directives in Asmc. Symbols Reference Provides links to topics discussing the use of symbols in Asmc. Change Log | Forum Asmc Macro Assembler Reference Asmc Command-Line Reference Assembles and links one or more assembly-language source files. The command-line options are case sensitive. ASMC [[options]] filename [[ [[options]] filename]] options The options listed in the following table. Set CPU: 0=8086 (default), 1=80186, 2=80286, 3=80386, 4=80486, /[0|1|..|10][p] 5=Pentium,6=PPro,7=P2,8=P3,9=P4,10=x86-64. [p] allows privileged instructions. /assert Generate .assert(code). Same as .assert:on. /bin Generate plain binary file. Push user registers before stack-frame is created in a /Cs proc. /coff Generate COFF format object file. /Cp Preserves case of all user identifiers. /Cu Maps all identifiers to upper case (default). Link switch used with /pe -- subsystem:console /cui (default). /Cx Preserves case in public and extern symbols. Defines a text macro with the given name. If value is /Dsymbol[[=value]] missing, it is blank. Multiple tokens separated by spaces must be enclosed in quotation marks. /enumber Set error limit number. /elf Generate 32-bit ELF object file. /elf64 Generate 64-bit ELF object file. -
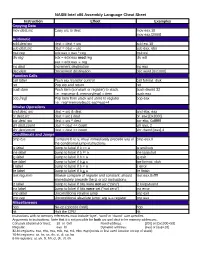
NASM Intel X86 Assembly Language Cheat Sheet
NASM Intel x86 Assembly Language Cheat Sheet Instruction Effect Examples Copying Data mov dest,src Copy src to dest mov eax,10 mov eax,[2000] Arithmetic add dest,src dest = dest + src add esi,10 sub dest,src dest = dest – src sub eax, ebx mul reg edx:eax = eax * reg mul esi div reg edx = edx:eax mod reg div edi eax = edx:eax reg inc dest Increment destination inc eax dec dest Decrement destination dec word [0x1000] Function Calls call label Push eip, transfer control call format_disk ret Pop eip and return ret push item Push item (constant or register) to stack. push dword 32 I.e.: esp=esp-4; memory[esp] = item push eax pop [reg] Pop item from stack and store to register pop eax I.e.: reg=memory[esp]; esp=esp+4 Bitwise Operations and dest, src dest = src & dest and ebx, eax or dest,src dest = src | dest or eax,[0x2000] xor dest, src dest = src ^ dest xor ebx, 0xfffffff shl dest,count dest = dest << count shl eax, 2 shr dest,count dest = dest >> count shr dword [eax],4 Conditionals and Jumps cmp b,a Compare b to a; must immediately precede any of cmp eax,0 the conditional jump instructions je label Jump to label if b == a je endloop jne label Jump to label if b != a jne loopstart jg label Jump to label if b > a jg exit jge label Jump to label if b > a jge format_disk jl label Jump to label if b < a jl error jle label Jump to label if b < a jle finish test reg,imm Bitwise compare of register and constant; should test eax,0xffff immediately precede the jz or jnz instructions jz label Jump to label if bits were not set (“zero”) jz looparound jnz label Jump to label if bits were set (“not zero”) jnz error jmp label Unconditional relative jump jmp exit jmp reg Unconditional absolute jump; arg is a register jmp eax Miscellaneous nop No-op (opcode 0x90) nop hlt Halt the CPU hlt Instructions with no memory references must include ‘byte’, ‘word’ or ‘dword’ size specifier.