Dominant Controls of Downdip Afterslip and Viscous Relaxation On
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cambridge University Press 978-1-108-44568-9 — Active Faults of the World Robert Yeats Index More Information
Cambridge University Press 978-1-108-44568-9 — Active Faults of the World Robert Yeats Index More Information Index Abancay Deflection, 201, 204–206, 223 Allmendinger, R. W., 206 Abant, Turkey, earthquake of 1957 Ms 7.0, 286 allochthonous terranes, 26 Abdrakhmatov, K. Y., 381, 383 Alpine fault, New Zealand, 482, 486, 489–490, 493 Abercrombie, R. E., 461, 464 Alps, 245, 249 Abers, G. A., 475–477 Alquist-Priolo Act, California, 75 Abidin, H. Z., 464 Altay Range, 384–387 Abiz, Iran, fault, 318 Alteriis, G., 251 Acambay graben, Mexico, 182 Altiplano Plateau, 190, 191, 200, 204, 205, 222 Acambay, Mexico, earthquake of 1912 Ms 6.7, 181 Altunel, E., 305, 322 Accra, Ghana, earthquake of 1939 M 6.4, 235 Altyn Tagh fault, 336, 355, 358, 360, 362, 364–366, accreted terrane, 3 378 Acocella, V., 234 Alvarado, P., 210, 214 active fault front, 408 Álvarez-Marrón, J. M., 219 Adamek, S., 170 Amaziahu, Dead Sea, fault, 297 Adams, J., 52, 66, 71–73, 87, 494 Ambraseys, N. N., 226, 229–231, 234, 259, 264, 275, Adria, 249, 250 277, 286, 288–290, 292, 296, 300, 301, 311, 321, Afar Triangle and triple junction, 226, 227, 231–233, 328, 334, 339, 341, 352, 353 237 Ammon, C. J., 464 Afghan (Helmand) block, 318 Amuri, New Zealand, earthquake of 1888 Mw 7–7.3, 486 Agadir, Morocco, earthquake of 1960 Ms 5.9, 243 Amurian Plate, 389, 399 Age of Enlightenment, 239 Anatolia Plate, 263, 268, 292, 293 Agua Blanca fault, Baja California, 107 Ancash, Peru, earthquake of 1946 M 6.3 to 6.9, 201 Aguilera, J., vii, 79, 138, 189 Ancón fault, Venezuela, 166 Airy, G. -
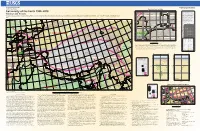
Seismicity of the Earth 1900–2010 THRUST B' Profiles of Earthquake and Volcanoes Are PAMIR Constructed from the Mapped Data
U.S. Department of the Interior Open-File Report 2010–1083–J U.S. Geological Survey Hindu Kush Focus Inset Map Version 1.1, revised January 28, 2014 70° E 71° E 72° E 73° E 74° E 75° E 76° E 39° N 39° N DEPTH PROFILE EXPLANATION Seismicity of the Earth 1900–2010 THRUST B' Profiles of earthquake and volcanoes are PAMIR constructed from the mapped data. Locations Himalaya and Vicinity of the profile intersection with the surface are MAIN TAJIKISTAN CHINA drawn in the map and labeled to coincide 1 1 1 1 1 1 2 3 2 2 4 2 with the profile label. Box defines extent of Compiled by Bethan Turner, Jennifer Jenkins, Rebecca Turner, Amy L. Parker, Alison Sinclair, Sian Davies, Gaven P. Hayes, Antonio Villaseñor, Richard L. Dart, Arthur C. Tarr, Kevin P. Furlong, and Harley M. Benz earthquakes included in the profile. Length of the profile graphic is the same as in the map. 2013 Distance in kilometers from the trench axis is indicated in the X direction, depth in 68° 70° 72° 74° 76° 78° 80° 82° 84° 86° 88° 90° 92° 94° 96° 98° 100° 102° 104° 106° 108° 110° 38° N kilometers is indicated in the Y direction. Lake amir There is no vertical exaggeration. See 46° Yinchuan 38° N P Balkhash Urumqi Explanation color key. Not all earth layers, earthquake depths or magnitude, are visible obaoho on every profile. Chai W 36° B X Distance (km) X' KAZAKHSTAN -500 -400 -300 -200 -100 0 1911 1932 AFGHANISTAN TRENCH AXIS 0 A' KARAKORAM FAULT 44° Almaty 1920 1927 37° N -100 37° N -200 Dzhambul Bishkek HAIYUAN FAULT Ysk Köl Lake -300 TALAS-FERGHANA FAULT Xining Lanzhou -

Living with Earthquake Hazards in South and South East Asia
ASEAN Journal of Community Engagement Volume 2 Number 1 July Article 2 7-31-2018 Living with earthquake hazards in South and South East Asia Afroz Ahmad Shah University of Brunei Darussalam, [email protected] Talha Qadri Universiti of Brunei Darussalam See next page for additional authors Follow this and additional works at: https://scholarhub.ui.ac.id/ajce Part of the Social and Behavioral Sciences Commons Recommended Citation Shah, Afroz Ahmad; Qadri, Talha; and Khwaja, Sheeba (2018). Living with earthquake hazards in South and South East Asia. ASEAN Journal of Community Engagement, 2(1). Available at: https://doi.org/10.7454/ajce.v2i1.105 Creative Commons License This work is licensed under a Creative Commons Attribution-Share Alike 4.0 License. This Research Article is brought to you for free and open access by the Universitas Indonesia at ASEAN Journal of Community Engagement. It has been accepted for inclusion in ASEAN Journal of Community Engagement. Afroz Ahmad Shah, Talha Qadri, Sheeba Khwaja | ASEAN Journal of Community Engagement | Volume 1, Number 2, 2018 Living with earthquake hazards in South and Southeast Asia Afroz Ahmad Shaha*, Talha Qadria, Sheeba Khwajab aUniversity of Brunei Darussalam, Brunei Darussalam bFaculty of Social Sciences, Department of History, University of Brunei Darussalam, Brunei Darussalam Received: March 7th, 2018 || Revised: May 24th & June 22nd, 2018 || Accepted: July 9th, 2018 Abstract A large number of geological studies have shown that most of the Asian regions are prone to earthquake risks, and this is particularly significant in SE Asia. The tectonics of this region allow the geological investigators to argue for severe vulnerability to major and devastating earthquakes in the near future. -

Active and Passive Seismic Investigation of Structure of Orogenic Lithosphere in Asia and South America
ACTIVE AND PASSIVE SEISMIC INVESTIGATION OF STRUCTURE OF OROGENIC LITHOSPHERE IN ASIA AND SOUTH AMERICA A Dissertation Presented to the Faculty of the Graduate School of Cornell University In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy by Chen Chen January 2015 © 2015 Chen Chen ACTIVE AND PASSIVE SEISMIC INVESTIGATION OF STRUCTURE OF OROGENIC LITHOSPHERE IN ASIA AND SOUTH AMERICA Chen Chen, Ph. D. Cornell University 2015 Asia and South America possess the two iconic orogenic belts – Himalayas and Andes and two largest and highest plateaus – Tibetan Plateau and Puna Plateau on the earth. Their lithospheres were formed under continental-continental collision and ocean-continent subduction regimes respectively. Seismic images of their current lithospheric structure provide key insights into the current stage in their evolutionary process. Lithospheric structure beneath the Tibetan Plateau has been studied using deep seismic reflection profiling since the beginning of the INDEPTH project in 1992. This international effort led by consortium of Chinese and western academic institutions, continued over 25 years in four different phases. Key features spanned by this megatransect include the Main Himalaya Thrust (MHT) at the southern margin of the plateau, crustal seismic bright spots in the south and central part of the plateau, Moho topography across the plateau and especially an abrupt step in the Moho beneath the northeastern margin of the Plateau beneath the Qaidam Basin. A recent reflection profile by the SINOPROBE Project across the Sichuan Basin located at the southeast edge of the Tibetan Plateau, reveals sub-crustal dipping reflectors which are very likely to result from Neo-Proterozoic subduction beneath the Sichuan Basin. -

Curriculum Vitae
UNIVERSITY OF CALIFORNIA, BERKELEY BERKELEY • DAVIS • IRVINE • LOS ANGELES • MERCED • RIVERSIDE • SAN DIEGO • SAN FRANCISCO SANTA BARBARA • SANTA CRUZ ROLAND BÜRGMANN DEPARTMENT OF EARTH AND PLANETARY SCIENCE TELEPHONE: (510) 643-9545 389 McCONE HALL FACIMILE: (510) 643-9980 BERKELEY, CALIFORNIA 94720-4767 E-Mail: [email protected] July 1, 2021 CURRICULUM VITAE EDUCATION: • Stanford University, Stanford, California, Ph.D., Geological Sciences, 1993. • University of Colorado, Boulder, Colorado, M.S., Structural Geology, 1989. • Universität Tübingen, Germany, Vordiplom, Geology, Paleontology and Mineralogy, 1987. RESEARCH INTERESTS: Active tectonics and crustal rheology. Using the Global Positioning System and Synthetic Aperture Radar Interferometry to measure crustal deformation near active faults, volcanoes and landslides. Develop mechanical models of crustal deformation through the earthquake cycle along major fault zones to better understand the rheology and deformation mechanisms in the Earth's lithosphere. PROFESSIONAL EXPERIENCE: Since 06/06 Professor, Department of Earth and Planetary Science, UC Berkeley 01/01-06/06 Associate Professor, Dept. of Earth and Planetary Science, UC Berkeley 07/98-12/00 Assistant Professor, Department of Geology and Geophysics, UC Berkeley 01/95-06/98 Assistant Professor, Department of Geology, UC Davis 10/93-12/94 Postdoctoral Scholar, Department of Geophysics, Stanford University 06/91-09/91 Student Employee at U.S. Geological Survey, Menlo Park 09/89-06/91 Teaching Assistant, Department -

Earthquake Cycle Deformation and the Moho: Implications for the Rheology of Continental Lithosphere
Tectonophysics 609 (2013) 504–523 Contents lists available at ScienceDirect Tectonophysics journal homepage: www.elsevier.com/locate/tecto Review Article Earthquake cycle deformation and the Moho: Implications for the rheology of continental lithosphere Tim J. Wright a,⁎,JohnR.Elliottb, Hua Wang c, Isabelle Ryder d a COMET+, School of Earth and Environment, University of Leeds, Leeds LS2 9JT, UK b COMET+, Department of Earth Sciences, University of Oxford, Oxford OX1 3AN, UK c Department of Surveying Engineering, Guangdong University of Technology, Guangzhou, China d School of Environmental Sciences, 4 Brownlow St, University of Liverpool, L69 3GP, UK article info abstract Article history: The last 20 years has seen a dramatic improvement in the quantity and quality of geodetic measurements of the Received 18 June 2012 earthquake loading cycle. In this paper we compile and review these observations and test whether crustal thick- Received in revised form 20 July 2013 ness exerts any control. We found 78 earthquake source mechanisms for continental earthquakes derived from Accepted 22 July 2013 satellite geodesy, 187 estimates of interseismic “locking depth”, and 23 earthquakes (or sequences) for which Available online 6 August 2013 postseismic deformation has been observed. Globally we estimate seismogenic thickness to be 14 ± 5 and 14 ± 7 km from coseismic and interseismic observations respectively. We find that there is no global relation- Keywords: Moho ship between Moho depth and the seismogenic layer thickness determined geodetically. We also found no Crustal deformation clear global relationship between seismogenic thickness and proxies for the temperature structure of the crust. Geodesy This suggests that the effect of temperature, so clear in oceanic lithosphere, is masked in the continents by consid- Continental rheology erable variation in lithology, strain-rate, and/or grain size. -

Earthquake Cycle Deformation and the Moho: Implications for the Rheology of Continental Lithosphere
This is a repository copy of Earthquake cycle deformation and the Moho: Implications for the rheology of continental lithosphere. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/80222/ Version: Accepted Version Article: Wright, TJ, Elliott, JR, Wang, H et al. (1 more author) (2013) Earthquake cycle deformation and the Moho: Implications for the rheology of continental lithosphere. Tectonophysics, 609. 504 - 523. ISSN 0040-1951 https://doi.org/10.1016/j.tecto.2013.07.029 Reuse Unless indicated otherwise, fulltext items are protected by copyright with all rights reserved. The copyright exception in section 29 of the Copyright, Designs and Patents Act 1988 allows the making of a single copy solely for the purpose of non-commercial research or private study within the limits of fair dealing. The publisher or other rights-holder may allow further reproduction and re-use of this version - refer to the White Rose Research Online record for this item. Where records identify the publisher as the copyright holder, users can verify any specific terms of use on the publisher’s website. Takedown If you consider content in White Rose Research Online to be in breach of UK law, please notify us by emailing [email protected] including the URL of the record and the reason for the withdrawal request. [email protected] https://eprints.whiterose.ac.uk/ Earthquake cycle deformation and the Moho: Implications for the rheology of continental lithosphere. Tim J. Wrighta, John Elliottb, Hua Wangc, Isabelle Ryderd aCOMET+, School of Earth and Environment, University of Leeds, Leeds, UK, LS2 9JT bCOMET+, Department of Earth Sciences, University of Oxford, Oxford, UK, OX1 3PR cDepartment of Surveying Engineering, Guangdong University of Technology, Guangzhou, China dSchool of Environmental Sciences, 4 Brownlow St, University of Liverpool, UK, L69 3GP Abstract The last 20 years has seen a dramatic improvement in the quantity and quality of geodetic measurements of the earthquake loading cycle. -

Insar for Coseismic Deformation Detection. Inversion for Fault
Fig. 1. Map of faults in Shan fault system. Green stars represent Coulomb stress change computation epicenters of large earthquake (M >6.3) events since 1976. The faults w Fig. 7 Nam Ma fault releases its stress during the earthquake, and the stress is re-distributed to are members of a group of left-lateral faults in Shan fault system posing surrounding area, especially near the Mae Chan fault slips. If we primarily consider Mae Chan fault, as network triangle faults between Sagaing fault in Myanmar and Red the east end and of Mae Chan fault could be failure caused by the increasingly of the stress as River fault in northern Vietnam. Many large earthquakes occurred in this indicated in the maximum value of coulomb stress scale around 0.6 bar. At the same time, the west fault system since late 20th century. Fig. 1.Map of faults in Shan fault system. Green stars represent epicenters of large earthquake (Mw>6.3) and middle of the fault are stress shadow zone. events since 1976. InSAR for Coseismic deformation detection. In the previous study, 4 ALOS PALSAR Single Look Complex images in both ascending track 126 and descending track 486 orbits were acquired before and after earthquake. This is shown in the Table 1 below. Table 1. Acquisition details of ALOS PALSAR data (fine beam mode with HH- polarization). Path Master date Slave date Perpendicular Baseline Temporal Baseline Fig. 7.Coulomb stress change result on Mae Chan and nearby fault in upper northern of Thailand after the (meter) (day) Tarlay earthquake. -

Artificial Neural Networks (ANN) and Stochastic Techniques to Estimate Earthquake Occurrences in Northeast Region of India
ANNALS OF GEOPHYSICS, 60, 6, S0658, 2017; doi: 10.4401/ag-7353 Artificial neural networks (ANN) and stochastic techniques to estimate earthquake occurrences in Northeast region of India Amit Zarola 1 and Arjun Sil 1, * 1 Department of Civil Engineering, NIT Silchar, Assam, India Article history Received January 10, 2017; accepted July 29, 2017. Subject classification: Forecasting, Seismicity, ANN, Seismic source, Hazard, Probability. ABSTRACT 1. Introduction The earthquake forecasting gives the probability of The paper presents the probability of earthquake occurrences and forecast - time, location and magnitude of occurrence of next ing of earthquake magnitudes size in northeast India, using four stochas - earthquake, which is necessary to understand the seis - tic m odels (Gamma, Lognormal, Weibull and Log-logistic) and artificial mic hazard of any region [Parvez and Ram, 1997]. An neural networks, respectively considering updated earthquake catalogue of earthquake is one of the most precarious natural haz - magnitude Mw ≥ 6.0 that occurred from year 1737 to 2015 in the study area. ards, which causes the sudden violent movement of the On the basis of past seismicity of the region, the conditional probabilities for earth’s crust, resulting in huge damage to structures and the identified seismic source zones (12 sources) have been estimated using their loss of human lives [Milne 1896]. The statistical approach best fit model and respective model parameters for various combinations of based on trends of earthquake such as seismicity pat - elapsed time (T) and time interval (t). It is observed that for elapsed time T=0 terns, seismic gaps, and characteristics of earthquake is years, EBT and Kabaw zone shows highest conditional probability and it the most appropriate and widely used method for esti - reaches 0.7 to 0.91 after about small time interval of 3-6 years (2014-2017; mation of the seismic hazard in any region. -

World Urbanization Prospects: the 2014 Revision, (ST/ESA/SER.A/366)
ST/ESA/SER.A/366 Department of Economic and Social Affairs Population Division World Urbanization Prospects The 2014 Revision United Nations New York, 2015 DESA The Department of Economic and Social Affairs of the United Nations Secretariat is a vital interface between global policies in the economic, social and environmental spheres and national action. The Department works in three main interlinked areas: (i) it compiles, generates and analyses a wide range of economic, social and environmental data and information on which States Members of the United Nations draw to review common problems and take stock of policy options; (ii) it facilitates the negotiations of Member States in many intergovernmental bodies on joint courses of action to address ongoing or emerging global challenges; and (iii) it advises interested Governments on the ways and means of translating policy frameworks developed in United Nations conferences and summits into programmes at the country level and, through technical assistance, helps build national capacities. Note The designations employed in this report and the material presented in it do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries. Symbols of United Nations documents are composed of capital letters combined with figures. This publication has been issued without formal editing. Suggested citation: United Nations, Department of Economic and Social Affairs, Population Division (2015). World Urbanization Prospects: The 2014 Revision, (ST/ESA/SER.A/366). PREFACE The Population Division of the Department of Economic and Social Affairs at the United Nations Secretariat is responsible for providing the international community with up-to-date and scientifically objective information on population and development. -

Coseismic and Postseismic Displacement of 2011 Mw 6.8
Article Coseismic and Postseismic Displacement of 2011 Mw 6.8 Tarlay Earthquake, Myanmar using InSAR Techniques and Inversion Analysis Pattama Phodee1,a,*, Itthi Trisirisatayawong1,b, and Anuphao Aobpaet2,c 1 Department of Survey Engineering, Faculty of Engineering, Chulalongkorn University, Bangkok 10330, Thailand 2 Geo-Informatics and Space Technology Development Agency (Public Organization), Bangkok 10210, Thailand E-mail: [email protected] (Corresponding author), [email protected], [email protected] Abstract. In this study, we investigate the March 24th, 2011 Mw=6.8 Tarlay earthquake, Myanmar using InSAR and inversion analysis. We firstly invert InSAR coseismic displacement from our previous study. The inversions for fault parameters are carried out in both Single and Multi-patch model. The coseismic slip of 2.5 meters from Single-patch solution is then combined with long-term slip rate from geomorphological study, resulting in an estimate of 1,040-4,160 years recurrence period. Then, coulomb stress changes on nearby faults in northern Thailand are calculated. It is found that stress in western and middle segments of Mae Chan fault decreases significantly while stress increase in eastern segment of Mae Chan, Mae Ing and Chiang Kham fault. Finally, the results from PSInSAR of 29 Radarsat-2 images reveal postseismic displacement rates between -24.4 to 34.5 millimeters per year. Keywords: Tarlay earthquake, Nam Ma Fault, coseismic motion, postseismic motion, inversion, InSAR, Coulomb stress change. ENGINEERING JOURNAL Volume 19 Issue 2 Received 16 July 2014 Accepted 1 December 2014 Published 30 April 2015 Online at http://www.engj.org/ DOI:10.4186/ej.2015.19.2.157 DOI:10.4186/ej.2015.19.2.157 1. -

Sagaing, Sagaing Region, Myanmar
DEVELOPING PROBABILISTIC SEISMIC HAZARD MAPS OF SAGAING, SAGAING REGION, MYANMAR December, 2015 CONTENTS EXECUTIVE SUMMARY ....................................................................................................... 3 1. INTRODUCTION ............................................................................................................ 5 1.1 Objectives of the project ............................................................................................. 6 1.2 Structure of report ........................................................................................................... 7 2 SEISMOTECTONICS AND GEOLOGY .............................................................................. 9 2.1 Seismotectonics of the region .......................................................................................... 9 3 METHODOLOGY AND USED DATA ............................................................................... 14 3.1 Methodology of Seismic Hazard Assessment ................................................................ 14 3.2 Applied Data ............................................................................................................. 15 3,2,1 Seismic Sources Identification and Characterization ............................................... 15 3.2.2 Site Investigation .................................................................................................... 16 3.3 Regional Geological Setting .....................................................................................