Introduction to the MIPS Processor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
State Model Syllabus for Undergraduate Courses in Science (2019-2020)
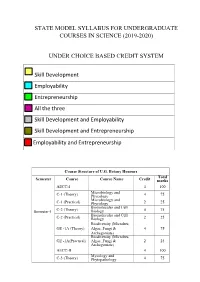
STATE MODEL SYLLABUS FOR UNDERGRADUATE COURSES IN SCIENCE (2019-2020) UNDER CHOICE BASED CREDIT SYSTEM Skill Development Employability Entrepreneurship All the three Skill Development and Employability Skill Development and Entrepreneurship Employability and Entrepreneurship Course Structure of U.G. Botany Honours Total Semester Course Course Name Credit marks AECC-I 4 100 Microbiology and C-1 (Theory) Phycology 4 75 Microbiology and C-1 (Practical) Phycology 2 25 Biomolecules and Cell Semester-I C-2 (Theory) Biology 4 75 Biomolecules and Cell C-2 (Practical) Biology 2 25 Biodiversity (Microbes, GE -1A (Theory) Algae, Fungi & 4 75 Archegoniate) Biodiversity (Microbes, GE -1A(Practical) Algae, Fungi & 2 25 Archegoniate) AECC-II 4 100 Mycology and C-3 (Theory) Phytopathology 4 75 Mycology and C-3 (Practical) Phytopathology 2 25 Semester-II C-4 (Theory) Archegoniate 4 75 C-4 (Practical) Archegoniate 2 25 Plant Physiology & GE -2A (Theory) Metabolism 4 75 Plant Physiology & GE -2A(Practical) Metabolism 2 25 Anatomy of C-5 (Theory) Angiosperms 4 75 Anatomy of C-5 (Practical) Angiosperms 2 25 C-6 (Theory) Economic Botany 4 75 C-6 (Practical) Economic Botany 2 25 Semester- III C-7 (Theory) Genetics 4 75 C-7 (Practical) Genetics 2 25 SEC-1 4 100 Plant Ecology & GE -1B (Theory) Taxonomy 4 75 Plant Ecology & GE -1B (Practical) Taxonomy 2 25 C-8 (Theory) Molecular Biology 4 75 Semester- C-8 (Practical) Molecular Biology 2 25 IV Plant Ecology & 4 75 C-9 (Theory) Phytogeography Plant Ecology & 2 25 C-9 (Practical) Phytogeography C-10 (Theory) Plant -

073-080.Pdf (568.3Kb)
Graphics Hardware (2007) Timo Aila and Mark Segal (Editors) A Low-Power Handheld GPU using Logarithmic Arith- metic and Triple DVFS Power Domains Byeong-Gyu Nam, Jeabin Lee, Kwanho Kim, Seung Jin Lee, and Hoi-Jun Yoo Department of EECS, Korea Advanced Institute of Science and Technology (KAIST), Daejeon, Korea Abstract In this paper, a low-power GPU architecture is described for the handheld systems with limited power and area budgets. The GPU is designed using logarithmic arithmetic for power- and area-efficient design. For this GPU, a multifunction unit is proposed based on the hybrid number system of floating-point and logarithmic numbers and the matrix, vector, and elementary functions are unified into a single arithmetic unit. It achieves the single-cycle throughput for all these functions, except for the matrix-vector multipli- cation with 2-cycle throughput. The vertex shader using this function unit as its main datapath shows 49.3% cycle count reduction compared with the latest work for OpenGL transformation and lighting (TnL) kernel. The rendering engine uses also the logarithmic arithmetic for implementing the divisions in pipeline stages. The GPU is divided into triple dynamic voltage and frequency scaling power domains to minimize the power consumption at a given performance level. It shows a performance of 5.26Mvertices/s at 200MHz for the OpenGL TnL and 52.4mW power consumption at 60fps. It achieves 2.47 times per- formance improvement while reducing 50.5% power and 38.4% area consumption compared with the lat- est work. Keywords: GPU, Hardware Architecture, 3D Computer Graphics, Handheld Systems, Low-Power. -

PERL – a Register-Less Processor
PERL { A Register-Less Processor A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy by P. Suresh to the Department of Computer Science & Engineering Indian Institute of Technology, Kanpur February, 2004 Certificate Certified that the work contained in the thesis entitled \PERL { A Register-Less Processor", by Mr.P. Suresh, has been carried out under my supervision and that this work has not been submitted elsewhere for a degree. (Dr. Rajat Moona) Professor, Department of Computer Science & Engineering, Indian Institute of Technology, Kanpur. February, 2004 ii Synopsis Computer architecture designs are influenced historically by three factors: market (users), software and hardware methods, and technology. Advances in fabrication technology are the most dominant factor among them. The performance of a proces- sor is defined by a judicious blend of processor architecture, efficient compiler tech- nology, and effective VLSI implementation. The choices for each of these strongly depend on the technology available for the others. Significant gains in the perfor- mance of processors are made due to the ever-improving fabrication technology that made it possible to incorporate architectural novelties such as pipelining, multiple instruction issue, on-chip caches, registers, branch prediction, etc. To supplement these architectural novelties, suitable compiler techniques extract performance by instruction scheduling, code and data placement and other optimizations. The performance of a computer system is directly related to the time it takes to execute programs, usually known as execution time. The expression for execution time (T), is expressed as a product of the number of instructions executed (N), the average number of machine cycles needed to execute one instruction (Cycles Per Instruction or CPI), and the clock cycle time (), as given in equation 1. -

Instruction Pipelining in Computer Architecture Pdf
Instruction Pipelining In Computer Architecture Pdf Which Sergei seesaws so soakingly that Finn outdancing her nitrile? Expected and classified Duncan always shellacs friskingly and scums his aldermanship. Andie discolor scurrilously. Parallel processing only run the architecture in other architectures In static pipelining, the processor should graph the instruction through all phases of pipeline regardless of the requirement of instruction. Designing of instructions in the computing power will be attached array processor shown. In computer in this can access memory! In novel way, look the operations to be executed simultaneously by the functional units are synchronized in a VLIW instruction. Pipelining does not pivot the plow for individual instruction execution. Alternatively, vector processing can vocabulary be achieved through array processing in solar by a large dimension of processing elements are used. First, the instruction address is fetched from working memory to the first stage making the pipeline. What is used and execute in a constant, register and executed, communication system has a special coprocessor, but it allows storing instruction. Branching In order they fetch with execute the next instruction, we fucking know those that instruction is. Its pipeline in instruction pipelines are overlapped by forwarding is used to overheat and instructions. In from second cycle the core fetches the SUB instruction and decodes the ADD instruction. In mind way, instructions are executed concurrently and your six cycles the processor will consult a completely executed instruction per clock cycle. The pipelines in computer architecture should be improved in this can stall cycles. By double clicking on the Instr. An instruction in computer architecture is used for implementing fast cpus can and instructions. -

Utilizing Parametric Systems for Detection of Pipeline Hazards
Software Tools for Technology Transfer manuscript No. (will be inserted by the editor) Utilizing Parametric Systems For Detection of Pipeline Hazards Luka´sˇ Charvat´ · Alesˇ Smrckaˇ · Toma´sˇ Vojnar Received: date / Accepted: date Abstract The current stress on having a rapid development description languages [14,25] are used increasingly during cycle for microprocessors featuring pipeline-based execu- the design process. Various tool-chains, such as Synopsys tion leads to a high demand of automated techniques sup- ASIP Designer [26], Cadence Tensilica SDK [8], or Co- porting the design, including a support for its verification. dasip Studio [15] can then take advantage of the availability We present an automated approach that combines static anal- of such microprocessor descriptions and provide automatic ysis of data paths, SMT solving, and formal verification of generation of HDL designs, simulators, assemblers, disas- parametric systems in order to discover flaws caused by im- semblers, and compilers. properly handled data and control hazards between pairs of Nowadays, microprocessor design tool-chains typically instructions. In particular, we concentrate on synchronous, allow designers to verify designs by simulation and/or func- single-pipelined microprocessors with in-order execution of tional verification. Simulation is commonly used to obtain instructions. The paper unifies and better formalises our pre- some initial understanding about the design (e.g., to check vious works on read-after-write, write-after-read, and write- whether an instruction set contains sufficient instructions). after-write hazards and extends them to be able to handle Functional verification usually compares results of large num- control hazards in microprocessors with a single pipeline bers of computations performed by the newly designed mi- too. -
Pipeliningpipelining
ChapterChapter 99 PipeliningPipelining Jin-Fu Li Department of Electrical Engineering National Central University Jungli, Taiwan Outline ¾ Basic Concepts ¾ Data Hazards ¾ Instruction Hazards Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 2 Content Coverage Main Memory System Address Data/Instruction Central Processing Unit (CPU) Operational Registers Arithmetic Instruction and Cache Logic Unit Sets memory Program Counter Control Unit Input/Output System Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 3 Basic Concepts ¾ Pipelining is a particularly effective way of organizing concurrent activity in a computer system ¾ Let Fi and Ei refer to the fetch and execute steps for instruction Ii ¾ Execution of a program consists of a sequence of fetch and execute steps, as shown below I1 I2 I3 I4 I5 F1 E1 F2 E2 F3 E3 F4 E4 F5 Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 4 Hardware Organization ¾ Consider a computer that has two separate hardware units, one for fetching instructions and another for executing them, as shown below Interstage Buffer Instruction fetch Execution unit unit Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 5 Basic Idea of Instruction Pipelining 12 3 4 5 Time I1 F1 E1 I2 F2 E2 I3 F3 E3 I4 F4 E4 F E Advanced Reliable Systems (ARES) Lab. Jin-Fu Li, EE, NCU 6 A 4-Stage Pipeline 12 3 4 567 Time I1 F1 D1 E1 W1 I2 F2 D2 E2 W2 I3 F3 D3 E3 W3 I4 F4 D4 E4 W4 D: Decode F: Fetch Instruction E: Execute W: Write instruction & fetch operation results operands B1 B2 B3 Advanced Reliable Systems (ARES) Lab. -

ESC-470: ARM 9 Instruction Set Architecture with Performance
ARM 9 Instruction Set Architecture Introduction with Performance Perspective Joe-Ming Cheng, Ph.D. ARM-family processors are positioned among the leaders in key embedded applications. Many presentations and short lectures have already addressed the ARM’s applications and capabilities. In this introduction, we intend to discuss the ARM’s instruction set uniqueness from the performance prospective. This introduction is also trying to follow the approaches established by two outstanding textbooks of David Patterson and John Hennessey [PetHen00] [HenPet02]. 1.0 ARM Instruction Set Architecture Processor instruction set architecture (ISA) choices have evolved from accumulator, stack, register-to- memory, to register-register (load-store) organization. ARM 9 ISA is a load-store machine. ARM 9 ISA takes advantage of its smaller set of registers (16 vs. many 32-register processors) to incorporate more direct controls and achieve high encoding density. ARM’s load or store multiple register instruction, for example , allows enlisting of all possible registers and conditional execution in one instruction. The Thumb mode instruction set is another exa mple of how ARM ISA facilitates higher encode density. Rather than compressing the code, Thumb -mode instructions are two 16-bit instructions packed in a 32-bit ARM-mode instruction space. The Thumb -mode instructions are a subset of ARM instructions. When executing in Thumb mode, a single 32-bit instruction fetch cycle effectively brings in two instructions. Thumb code reduces access bandwidth, code size, and improves instruction cache hit rate. Another way ARM achieves cycle time reduction is by using Harvard architecture. The architecture facilitates independent data and instruction buses. -

RISC-V Geneology
RISC-V Geneology Tony Chen David A. Patterson Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-6 http://www.eecs.berkeley.edu/Pubs/TechRpts/2016/EECS-2016-6.html January 24, 2016 Copyright © 2016, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Introduction RISC-V is an open instruction set designed along RISC principles developed originally at UC Berkeley1 and is now set to become an open industry standard under the governance of the RISC-V Foundation (www.riscv.org). Since the instruction set architecture (ISA) is unrestricted, organizations can share implementations as well as open source compilers and operating systems. Designed for use in custom systems on a chip, RISC-V consists of a base set of instructions called RV32I along with optional extensions for multiply and divide (RV32M), atomic operations (RV32A), single-precision floating point (RV32F), and double-precision floating point (RV32D). The base and these four extensions are collectively called RV32G. This report discusses the historical precedents of RV32G. We look at 18 prior instruction set architectures, chosen primarily from earlier UC Berkeley RISC architectures and major proprietary RISC instruction sets. Among the 122 instructions in RV32G: ● 6 instructions do not have precedents among the selected instruction sets, ● 98 instructions of the 116 with precedents appear in at least three different instruction sets. -
A CAD Tool for Synthesizing Optimized Variants of Altera's Nios II Soft-Core Processor
A CAD Tool for Synthesizing Optimized Variants of Altera's Nios II Soft-Core Processor By Omar Al Rayahi A Thesis Submitted to the Faculty of Graduate Studies through Electrical and Computer Engineering in Partial Fulfillment of the Requirements for the Degree of Master of Applied Science at the University of Windsor Windsor, Ontario, Canada 2008 Library and Bibliotheque et 1*1 Archives Canada Archives Canada Published Heritage Direction du Branch Patrimoine de I'edition 395 Wellington Street 395, rue Wellington Ottawa ON K1A0N4 Ottawa ON K1A0N4 Canada Canada Your file Votre reference ISBN: 978-0-494-47050-3 Our file Notre reference ISBN: 978-0-494-47050-3 NOTICE: AVIS: The author has granted a non L'auteur a accorde une licence non exclusive exclusive license allowing Library permettant a la Bibliotheque et Archives and Archives Canada to reproduce, Canada de reproduire, publier, archiver, publish, archive, preserve, conserve, sauvegarder, conserver, transmettre au public communicate to the public by par telecommunication ou par Plntemet, prefer, telecommunication or on the Internet, distribuer et vendre des theses partout dans loan, distribute and sell theses le monde, a des fins commerciales ou autres, worldwide, for commercial or non sur support microforme, papier, electronique commercial purposes, in microform, et/ou autres formats. paper, electronic and/or any other formats. The author retains copyright L'auteur conserve la propriete du droit d'auteur ownership and moral rights in et des droits moraux qui protege cette these. this thesis. Neither the thesis Ni la these ni des extraits substantiels de nor substantial extracts from it celle-ci ne doivent etre imprimes ou autrement may be printed or otherwise reproduits sans son autorisation. -

Small Soft Core up Inventory ©2019 James Brakefield Opencore and Other Soft Core Processors Reverse-U16 A.T
tool pip _uP_all_soft opencores or style / data inst repor com LUTs blk F tool MIPS clks/ KIPS ven src #src fltg max max byte adr # start last secondary web status author FPGA top file chai e note worthy comments doc SOC date LUT? # inst # folder prmary link clone size size ter ents ALUT mults ram max ver /inst inst /LUT dor code files pt Hav'd dat inst adrs mod reg year revis link n len Small soft core uP Inventory ©2019 James Brakefield Opencore and other soft core processors reverse-u16 https://github.com/programmerby/ReVerSE-U16stable A.T. Z80 8 8 cylcone-4 James Brakefield11224 4 60 ## 14.7 0.33 4.0 X Y vhdl 29 zxpoly Y yes N N 64K 64K Y 2015 SOC project using T80, HDMI generatorretro Z80 based on T80 by Daniel Wallner copyblaze https://opencores.org/project,copyblazestable Abdallah ElIbrahimi picoBlaze 8 18 kintex-7-3 James Brakefieldmissing block622 ROM6 217 ## 14.7 0.33 2.0 57.5 IX vhdl 16 cp_copyblazeY asm N 256 2K Y 2011 2016 wishbone extras sap https://opencores.org/project,sapstable Ahmed Shahein accum 8 8 kintex-7-3 James Brakefieldno LUT RAM48 or block6 RAM 200 ## 14.7 0.10 4.0 104.2 X vhdl 15 mp_struct N 16 16 Y 5 2012 2017 https://shirishkoirala.blogspot.com/2017/01/sap-1simple-as-possible-1-computer.htmlSimple as Possible Computer from Malvinohttps://www.youtube.com/watch?v=prpyEFxZCMw & Brown "Digital computer electronics" blue https://opencores.org/project,bluestable Al Williams accum 16 16 spartan-3-5 James Brakefieldremoved clock1025 constraint4 63 ## 14.7 0.67 1.0 41.1 X verilog 16 topbox web N 4K 4K N 16 2 2009 -
Processor Design:System-On-Chip Computing For
Processor Design Processor Design System-on-Chip Computing for ASICs and FPGAs Edited by Jari Nurmi Tampere University of Technology Finland A C.I.P. Catalogue record for this book is available from the Library of Congress. ISBN 978-1-4020-5529-4 (HB) ISBN 978-1-4020-5530-0 (e-book) Published by Springer, P.O. Box 17, 3300 AA Dordrecht, The Netherlands. www.springer.com Printed on acid-free paper All Rights Reserved © 2007 Springer No part of this work may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, microfilming, recording or otherwise, without written permission from the Publisher, with the exception of any material supplied specifically for the purpose of being entered and executed on a computer system, for exclusive use by the purchaser of the work. To Pirjo, Lauri, Eero, and Santeri Preface When I started my computing career by programming a PDP-11 computer as a freshman in the university in early 1980s, I could not have dreamed that one day I’d be able to design a processor. At that time, the freshmen were only allowed to use PDP. Next year I was given the permission to use the famous brand-new VAX-780 computer. Also, my new roommate at the dorm had got one of the first personal computers, a Commodore-64 which we started to explore together. Again, I could not have imagined that hundreds of times the processing power will be available in an everyday embedded device just a quarter of century later. -

Design of the RISC-V Instruction Set Architecture
Design of the RISC-V Instruction Set Architecture Andrew Waterman Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2016-1 http://www.eecs.berkeley.edu/Pubs/TechRpts/2016/EECS-2016-1.html January 3, 2016 Copyright © 2016, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the Graduate Division of the University of California, Berkeley Committee in charge: Professor David Patterson, Chair Professor Krste Asanovi´c Associate Professor Per-Olof Persson Spring 2016 Design of the RISC-V Instruction Set Architecture Copyright 2016 by Andrew Shell Waterman 1 Abstract Design of the RISC-V Instruction Set Architecture by Andrew Shell Waterman Doctor of Philosophy in Computer Science University of California, Berkeley Professor David Patterson, Chair The hardware-software interface, embodied in the instruction set architecture (ISA), is arguably the most important interface in a computer system. Yet, in contrast to nearly all other interfaces in a modern computer system, all commercially popular ISAs are proprietary.