Technologies for Precision Docking at Level-Boarding
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Highlight / Progress Report
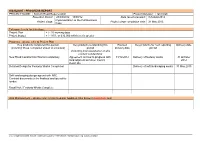
HIGHLIGHT / PROGRESS REPORT PROJECT NAME: Kinloch Road Regeneration Project Manager: Ian Imlah Reporting Period: 28/03/2012 – 15/08/12 Date report prepared: 9 August 2012 Implementation of the Full Business Project stage: Project stage completion date: 31 May 2013 Case Tolerance levels for this stage: Project Plan + / - 15 working days Project budget + / - 10%, or £10,000 whichever is greater Progress – please refer to Project Plan Key products completed this period Key products outstanding this Revised Key products for next reporting Delivery date (including those completed ahead of schedule) period delivery date period (including brief explanation of why product outstanding) New Road Construction Works is underway Agreement on how to progress with 31/12/2012 Delivery of footway works 31 October land adjacent to former council 2012 depot site Detailed Design for Footway Works Completed Delivery of soft landscaping works 31 May 2013 Soft landscaping design agreed with ABC. Contract documents to be finalised and issued for tender. Royal Hotel Footway Works Complete. Risk Management – please refer to Risk Register (updates risks below in bold italic text) o:\a_campbeltown\cn03_kinloch_road\board_papers\l_150812\cn03_highlight_prog_rep_august 2012.doc Budget Management – please refer to Resource Allocation Schedule Total budget available to complete FBC stage: £100,000 Actual expenditure £102,209 Variance explanation if required: Revenue budget now used – Business Case developed and now progressing implementation stage (capital expenditure) Budget approved – implementation of public £2,080,000 realm and soft landscaping works: Actual expenditure to date (as at 31 July 2012) £715,013 Variance explanation if required: Budget approved - ACHA £800,000 Actual expenditure to date (as at 31 July 2012) £0 Variance explanation if required: Any further information Status update on elements: Public Realm - • Public realm associated with the new road has been procured through the road contract. -

Regional Transit Technical Advisory Committee October 29, 2014 Full
MEETING OF THE REGIONAL TRANSIT TECHNICAL ADVISORY COMMITTEE Wednesday, October 29, 2014 10:00 a.m. – 12:00 p.m. SCAG Los Angeles Main Office 818 W. 7th Street, 12th Floor, Policy Committee Room A Los Angeles, California 90017 (213) 236-1800 Teleconferencing Available: Please RSVP with Ed Rodriguez at [email protected] 24 hours in advance. Videoconferencing Available: Orange SCAG Office Ventura SCAG Office 600 S. Main St, Ste. 906 Orange, CA 92863 950 County Square Dr, Ste 101 Ventura, CA 93003 Imperial SCAG Office Riverside SCAG Office 1405 North Imperial Ave., Suite 1 , CA 92243 3403 10th Street, Suite 805 Riverside, CA 92501 SCAG San Bernardino Office 1170 W. 3rd St, Ste. 140 San Bernardino, CA 92410 If members of the public wish to review the attachments or have any questions on any of the agenda items, please contact Matt Gleason at (213) 236-1832 or [email protected]. REGIONALTRANSIT TECHNICAL ADVISORY COMMITTEE AGENDA October 29, 2014 The Regional Transit Technical Advisory Committee may consider and act upon any TIME PG# of the items listed on the agenda regardless of whether they are listed as information or action items. 1.0 CALL TO ORDER (Wayne Wassell, Metro, Regional Transit TAC Chair) 2.0 PUBLIC COMMENT PERIOD - Members of the public desiring to speak on items on the agenda, or items not on the agenda, but within the purview of the Regional Transit Technical Advisory Committee, must fill out and present a speaker’s card to the assistant prior to speaking. Comments will be limited to three minutes. -
Manual on Uniform Traffic Control Devices (MUTCD) What Is the MUTCD?
National Committee on Uniform Traffic Control Devices Bus/BRT Applications Introduction • I am Steve Andrle from TRB standing in for Randy McCourt, DKS Associates and 2019 ITE International Vice President • I co-manage with Claire Randall15 TRB public transit standing committees. • I want to bring you up to date on planned bus- oriented improvements to the Manual on Uniform Traffic Control Devices (MUTCD) What is the MUTCD? • Manual on Uniform Traffic Control Devices (MUTCD) – Standards for roadway signs, signals, and markings • Authorized in 23 CFR, Part 655: It is an FHWA document. • National Committee on Uniform Traffic Control Devices (NCUTCD) develops content • Sponsored by 19 organizations including ITE, AASHTO, APTA and ATSSA (American Traffic Safety Services Association) Background • Bus rapid transit, busways, and other bus applications have expanded greatly since the last edition of the MUTCD in 2009 • The bus-related sections need to be updated • Much of the available research speaks to proposed systems, not actual experience • The NCUTCD felt it was a good time to survey actual systems to see what has worked, what didn’t work, and to identify gaps. National Survey • The NCUTCD established a task force with APTA and FTA • Working together they issued a survey in April of 2018. I am sure some of you received it. • The results will be released to the NCUTCD on June 20 – effectively now • I cannot give you any details until the NCUTCD releases the findings Survey Questions • Have you participated in design and/or operations of -

Greater Cleveland Regional Transit Authority
Greater Cleveland Regional Transit Authority Joe Calabrese - General Manager RTA Ridership by Mode ! 500 Buses - 75 % ! 60 Heavy Rail Vehicles - 10% ! 24 RTV’s (BRT) - 8% ! 48 Light Rail Vehicles - 6% ! Paratransit - 100 vehicles - 1% RTA Fleet GCRTA HealthLine Euclid Avenue Transformation Euclid Avenue History Euclid Avenue History Alternatives Analysis - late 1990’s ! Subway ! Light Rail ! Do Nothing (keep the #6 bus) ! Bus Rapid Transit (BRT) Mode Selection Criteria ! Capacity (30,000 + daily customers) ! Connectivity ! Funding possibilities (FTA) ! Cost - capital and operating ! Economic development potential " Renew Aging Infrastructure Vision for the “Silver Line” BRT ! “Rail Like” Image ! Fast ! Simple ! Safe ! First Class ! Help Revitalize Corridor Euclid Corridor Project ! 9.38 miles long ! 36 stations (from 100 bus stops) ! Travel time from 40 to 28 minutes ! Building face to building face ! Pedestrian and bicycle friendly ! Landscape/hardscape treatment ! Pubic Art - Integrated/stand-alone Exclusive Right of Way Funding Pie Charts FTA 80% ODOT 20% 2000 ODOT FTA 25% 50% City MPO RTA 2004 Ground Breaking October 2004 “Silver Line” Construction “Silver Line” Construction (3.5 years) “Silver Line” Construction “Silver Line” Construction “Silver Line” Construction “Rail Like” Image ! Reduced Travel Time " Multi-Door Boarding " Exclusive Right-of-Way " Traffic Signal Prioritization " Higher Travel Speeds " Level Boarding " Precision Docking " Rear Facing Wheel Chair Restraints " Off-Board Fare Collection “Rail Like” Image ! Hi-Frequency -

Metropolitan Council 2020 Capital Budget With
Metropolitan Council Projects Summary ($ in thousands) Project Requests for Gov's Gov's Planning State Funds Rec Estimates Project Title Rank Fund 2020 2022 2024 2020 2022 2024 Busway Capital Improvement Program Bus 1 GO 55,000 50,000 50,000 55,000 0 0 Rapid Transit Regional Parks and Trails Grant Program 2 GO 15,000 15,000 15,000 10,000 10,000 10,000 Inflow and Infiltration Grant Program 3 GO 9,500 9,500 9,500 5,000 5,000 5,000 Total Project Requests 79,500 74,500 74,500 70,000 15,000 15,000 General Obligation Bonds (GO) Total 79,500 74,500 74,500 70,000 15,000 15,000 State of Minnesota Final Capital Budget Requests January 2020 Page 1 Metropolitan Council Agency Profile metrocouncil.org/ AT A GLANCE • 3.1 million residents in the seven-county area in 2017 (55 percent of total state population) • 888,000 more people from 2010 to 2040 (31% increase) per Council forecasts • 419,000 more households from 2010 to 2040 (38% increase) per Council forecasts • 495,000 more jobs from 2010 to 2040 (32% increase) per Council forecasts • 94.2 million transit rides in 2017 • 2.38 million rides on Metro Mobility in 2017 • 250 million gallons of wastewater treated daily • 110 communities provided with wastewater treatment in 2018 • Nine treatment plants and 600 miles of regional sewers • 59 million regional park visits in 2017 • 56 regional parks and park reserves totaling 55,000 acres in the seven-county metropolitan area • 49 regional trails totaling nearly 400 miles • 7,200 low-income households provided affordable housing by the Council’s Metro HRA in 2017 PURPOSE The Metropolitan Council is the regional policy-making body, planning agency, and provider of essential services for the Twin Cities metropolitan region. -

City Council Work Session Agenda Section Work Session Meeting Date April 5, 2021
CITY COUNCIL WORK SESSION AGENDA SECTION WORK SESSION MEETING DATE APRIL 5, 2021 ITEM: BUS RAPID TRANSIT (BRT) LINES DEPARTMENT: Public Works BY/DATE: Kevin Hansen/April 1, 2021 CITY STRATEGY: (please indicate areas that apply by adding a bold “X” in front of the selected text below) X_Safe Community _Diverse, Welcoming “Small-Town” Feel _Economic Strength _Excellent Housing/Neighborhoods _Equity and Affordability X_Strong Infrastructure/Public Services _Opportunities for Play and Learning _Engaged, Multi-Generational, Multi-Cultural Population BACKGROUND: ‘NetworkNext’ is a 20-year plan initiated by Metro Transit for expanding and improving the bus network serving the metro area. Transit improvements under consideration include improved local and express routes, integrated shared mobility options, and new arterial bus rapid transit (BRT) lines. Bus rapid transit (BRT) provides an improved customer experience with frequent service and faster trips in our the Metro’s busiest bus corridors. Metro Transit first studied a dozen potential BRT lines in 2011-2012. This study led to the implementation of the METRO A Line in 2016 and the METRO C Line in 2019. Metro Transit has reported both lines have been very successful in increasing ridership and customers satisfaction. In 2020 and 2021, Metro Transit engaged the public to help identify the Metro’s next BRT priorities. Each step was based on four principles that guided the planning process for BRT, rooted in public engagement, Metropolitan Council transit policy, and the performance of the bus network: Advance equity and reduce regional racial disparities Build on success to grow ridership Design a network that supports a transit-oriented lifestyle Ensure the long-term sustainable growth of the bus network In February 2021, following months of analysis and community engagement, Metro Transit finalized recommendations for the next expansions in the BRT network: The METRO F Line will serve the Central Avenue corridor, modifying Route 10 from downtown Minneapolis to Northtown Mall via Central and University avenues. -

Road Drainage in This Chapter
Road Drainage In this chapter 01 Introduction 3 02 Design principles 5 2.1 Water sensitive design (WSD) or Integrated Stormwater Management (ISM) 5 2.2 Integration of drainage 6 2.3 Tiered objectives for stormwater management design in road reserves 7 2.4 Major/minor drainage 11 03 Surface water management 12 04 Stormwater management devices 13 4.1 Treatment /Management Options Tool Box 15 4.2 Bio-retention swales, rain gardens and tree pits 16 4.3 Pervious paving 17 4.4 Sand filters, gravel trenches and rain tanks 18 4.5 Ponds and wetlands 18 4.6 Swales and vegetated swales 19 4.7 Soakage pits 20 4.8 Proprietary devices 20 05 Kerbs and channels 20 06 Catchpits 22 6.1 Catchpit location 22 6.2 Catchpit design 23 6.3 Catchpit approved types 25 6.4 Catchpit selection criteria 25 6.5 Catchpit inlet selection 25 6.6 Catchpit leads 26 07 Manholes 27 08 Rural road drainage 27 09 Subsoil drains 29 10 Minor culverts 29 11 Special areas 31 2 TDM | ENGINEERING DESIGN CODE Road drainage & surface water control 01 Introduction PURPOSE This chapter gives guidance for the design of drainage in the road reserve. It specifies limitations on design choices to achieve consistency across the region, while catering for local conditions. It aims to promote efficiency, effectiveness and economy of capital investment and operational management water sensitive design. SCOPE The situations covered include: • Drainage of surface water within road reserves. • Collection, conveyance and treatment of run-off from roads. • Management of stormwater discharging from land onto road reserves. -

BUS STATIONS AS TOD ANCHORS REPORT Prepared in Accordance with California Senate Bill 961, 2017-2018 Regular Session
Housing Financing Tools and Equitable, Location-Efficient Development in California BUS STATIONS AS TOD ANCHORS REPORT Prepared in Accordance with California Senate Bill 961, 2017-2018 Regular Session Prepared for: Governor's Office of Planning and Research December 29, 2020 TABLE OF CONTENTS EXECUTIVE SUMMARY ............................................................................................................... 1 I. INTRODUCTION ....................................................................................................................... 5 Report Purpose ....................................................................................................................... 5 Report Organization ................................................................................................................ 5 II. BACKGROUND ON THE SECOND NEIGHBORHOOD INFILL FINANCE AND TRANSIT IMPROVEMENTS ACT ................................................................................................................ 7 Definition of Bus Transit ......................................................................................................... 7 Extent of Use ........................................................................................................................... 7 III. LITERATURE REVIEW ............................................................................................................ 9 Literature Overview ................................................................................................................ -
Work Session Virtual Meeting Held Via Webex December 8, 2020 6:15 Pm
WORK SESSION VIRTUAL MEETING HELD VIA WEBEX DECEMBER 8, 2020 6:15 PM Call to order 1. Metropolitan Transit Project Manager Shahin Khazrajafari will be presenting an overview of the forthcoming Metro Transit D Line Bus Rapid Transit project, the anticipated construction timeline, and will be available to answer any questions. Adjournment Auxiliary aids for individuals with disabilities are available upon request. Requests must be made at least 96 hours in advance to the City Clerk at 612-861-9738. AGENDA SECTION: Work Session Items AGENDA ITEM # 1. WORK SESSION STAFF REPORT NO. 31 WORK SESSION 12/8/2020 REPORT PREPARED BY: Joe Powers, Assistant City Engineer DEPARTMENT DIRECTOR REVIEW: Kristin Asher, Public Works Director/City Engineer 12/2/2020 OTHER DEPARTMENT REVIEW: N/A CITY MANAGER REVIEW: Katie Rodriguez, City Manager 12/2/2020 ITEM FOR WORK SESSION: Metropolitan Transit Project Manager Shahin Khazrajafari will be presenting an overview of the forthcoming Metro Transit D Line Bus Rapid Transit project, the anticipated construction timeline, and will be available to answer any questions. EXECUTIVE SUMMARY: Metro Transit is moving towards construction of planned improvements to the Route 5 corridor with the D Line Bus Rapid Transit (BRT) project after securing final project funding at the legislature in the recent bonding bill. The project will be a positive asset to the City of Richfield and enhance the overall metro transit system in our region. The D Line will substantially replace Route 5, running primarily on Portland Avenue within Richfield and on Chicago, Emerson and Fremont Avenues in Minneapolis. Rapid bus brings better amenities, such as: Faster, more frequent service; Pre-boarding fare payment for faster stops; Neighborhood-scale stations with amenities; Enhanced security; and, Larger & specialized vehicles. -
Ctfastrak Existing Condition
Hartford Line TOD Action Plan Desire & Readiness Workshop: Town of Windsor Locks October 20, 2016 State Project No. 170-3396 1 Task 8 Agenda 1. Project Background and Overview 2. TOD Principles and Precedents 3. CTrail Hartford Line Station Area Assessment • TOD Desire & Readiness Criteria • Initial Observations from the Project Team 4. Interactive Workshop • Preliminary Areas of Focus • Instructions 2 Project Background Establishing a Point of Departure in Windsor Locks • Hartford Line TOD Action Plan • Town of Windsor Locks POCD Update • Main Street Property Acquisition and • Windsor Locks TOD Study Pre-Development (OPM) • Making it Happen • CRCOG Regional Complete Streets Policy and Action Plan (OPM) • Historic Train Station Reuse Study Windsor Locks Downtown • Capitol Region Master Plan Transportation Plan 2007 2008 2012 2013 2014 2015 2016 Ongoing/Forthcoming • Incentive Housing Downtown TIF Zone Study District Master Plan • Capital Region POCD Town of Windsor Locks EA/EIE for NHHS Rail Program POCD 3 Project Background Initial Thoughts from the Project Team: Key Issues to Advance TOD in Windsor Locks Reinvigorate downtown/Main Street Activate and maximize development as a destination potential of catalytic sites in the station area . Address lasting impacts of urban . Target sites and recommended sequencing renewal, and change the mindset of Main have been identified, but there are Street as a pass through outstanding questions: . Find a balance between maintaining • What can be done to make sites more traffic flow and creating a pedestrian- attractive to potential developers? and bicycle-friendly downtown • Are there opportunities to assemble a critical mass of sites to enable a larger . Consider developing a downtown development proposition? parking strategy 4 Source: Windsor Locks TOD Study Project Background Funding through FTA Pilot Program for TOD Planning . -

Cad Buick Catalog 1
Shipping Schedule: Charge Small Parcel Shipping within the Continental U.S. For orders from 0.01 to 50.00 13.00 Use the shipping schedule to determine your charges for small For orders from 50.01 to 100.00 18.00 parcel surface shipping in the continental United States. For orders from 100.01 to 200.00 25.00 Air shipping is available at extra cost. All carriers use dimensional weight to assess air shipping charges. For orders from 200.01 to 350.00 33.00 For orders from 350.01 to 500.00 42.00 For orders over 500.00 50.00 Small Parcel Shipping to Alaska, Hawaii, Canada and all other International Locations: USPS, Federal Express, and other small package carriers have instituted dimensional weight, the charges for packages vary widely. Estimates are 30-35% of parts cost. We recommend customers in Alaska, Hawaii and international locations to use Federal Express for best results. Large parcel orders are shipped via air freight. You may contact us for specific details regarding your shipping charge for outside the continental US. Back Orders: Although we have a large inventory of parts available, occasionally back orders occur. Regular inventory items not in stock at the time of your order will be shipped at no additional cost. Damaged Merchandise: Contact us immediately if you have a damaged parcel. Do not discard any packing as you may delay your chances of quick resolution. Have your invoice number ready when calling. Any damage or shortages must be reported to us within 7 days of receipt of goods. -

Greater Cleveland Regional Transit Authority
Greater Cleveland Regional Transit Authority Joe Calabrese – General Manager Greater Cleveland RTA Overview . Service Area 59 municipalities 500 square miles Population of 1.5 million . Customers Served 200,000 on a typical weekday 1 RTA Overview . Services Modes 500 Buses 100 Paratransit Vans 20 Job Access Vans 60 Heavy Rail Vehicles 48 Light Rail Vehicles 24 RTV’s - (HealthLine BRT) 2 RTA Fleet 3 GCRTA HealthLine Euclid Avenue Transformation Euclid Avenue History 4 Euclid Avenue History Euclid Avenue History . Streetcars disappeared in 1954 . # 6 Bus Route put in service Great Service with Low Image . Alternative Analysis Subway or Light Rail Do Nothing (keep the #6 bus) Bus Rapid Transit (BRT) 5 Mode Selection Criteria . Capacity (30,000 + daily customers) . Connectivity . Funding possibilities (FTA) . Cost Capital Operating . Economic development potential Vision for the “Silver Line” . “Rail-Like” Image . Fast . Simple . Safe . First Class . Promote Economic Development 6 Euclid Corridor Project – 9.38 Miles . 36 stations . Travel time from 28 to 40 minutes . Building face to building face . Pedestrian friendly with bike lanes . Landscape/hardscape treatment 1,500 trees with irrigation . Integrated/stand-alone public art 7 Ground Breaking October 2004 8 Funding Pie Charts - $200 Million FTA 80% ODOT 20% 2000 ODOT FTA 25% 50% City MPO RTA 2004 Exclusive Right of Way 9 10 11 “Rail-Like” Characteristics . Quicker Travel Times Exclusive Right-of-Way Higher Travel Speed Limit Traffic Signal Prioritization Precision Docking Level Boarding “Stations” Off Board Fare Collection 12 “Rail-Like” Service and Image . Hi-Frequency Service 24x7 Peak every 5 minutes Off-Peak every 8 to 15 minutes .