Kite Generator System Modeling and Grid Integration Mariam Ahmed, Ahmad Hably, Seddik Bacha
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Power Limit for Crosswind Kite Systems
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 5 February 2018 doi:10.20944/preprints201802.0035.v1 Power Limit for Crosswind Kite Systems Mojtaba Kheiri1,2, Frédéric Bourgault1, Vahid Saberi Nasrabad1 1New Leaf Management Ltd., Vancouver, British Columbia, Canada 2 Concordia University, Department of Mechanical, Industrial and Aerospace Engineering, Montréal, Québec, Canada ABSTRACT static kite which only harvests from a region of the sky corresponding to its projected cross-section (and/or the rotor area of the turbine(s) it This paper generalizes the actuator disc theory to the application of carries). crosswind kite power systems. For simplicity, it is assumed that the kite sweeps an annulus in the air, perpendicular to the wind direction (i.e. Simplistically, a crosswind system parallels a horizontal axis wind straight downwind configuration with tether parallel to the wind). It is turbine (HAWT), where the kite traces a similar trajectory as the further assumed that the wind flow has a uniform distribution. turbine blade tip (see Fig.1)1. For a HAWT, approximately half the Expressions for power harvested by the kite is obtained, where the power is generated by the last one third of the blade (Bazilevs, et al., effect of the kite on slowing down the wind (i.e. the induction factor) is 2011). To capture the same wind power, a kite does not require taken into account. It is shown that although the induction factor may HAWT's massive hub and nacelle, steel tower and reinforced concrete be small for a crosswind kite (of the order of a few percentage points), foundation. -

Airborne Wind Energy
Airborne Wind Energy Technology Review and Feasibility in Germany Seminar Paper for Sustainable Energy Systems Faculty of Mechanical Engineering Technical University of Munich Supervisors Johne, Philipp Hetterich, Barbara Chair of Energy Systems Authors Drexler, Christoph Hofmann, Alexander Kiss, Balínt Handed in Munich, 05. July 2017 Abstract As a new generation of wind energy systems, AWESs (Airborne Wind Energy Systems) have the potential to grow competitive to their conventional ancestors within the upcoming decade. An overview of the state of the art of AWESs has been presented. For the feasibility ana- lysis of AWESs in Germany, a detailed wind analysis of a three dimensional grid of 80 data points above Germany has been conducted. Long-term NWM (Numerical Weather Model) data over 38 years provided by the NCEP (National Centers for Environmental Prediction) has been analysed to determine the wind probability distributions at elevated altitudes. Besides other data, these distributions and available performance curves have been used to calcu- late the evaluation criteria AEEY (Annual Electrical Energy Yield) and CF (Capacity Factor). Together with the additional criteria LCOE (Levelised Costs of Electricity), MP (Material Per- formance), and REP (Rated Electrical Power) a quantitative cost utility analysis according to Zangemeister has been conducted. This analysis has shown that AWESs look promising and could become an attractive alternative to traditional wind energy systems. 2 Table of Contents 1 Introduction ...................................................................................................... -

Power Limit of Crosswind Kites
Power Limit of Crosswind Kites Haocheng Li Aerospace Engineering Program, Worcester Polytechnic Institute Abstract In this paper, a generalized power limit of the cross wind kite energy systems is proposed. Based on the passivity property of the aerodynamic force, the available power which can be harvested by a cross wind kite is derived. For the small side slip angle case, an analytic result is calculated. Furthermore, an algorithm to calculated the real time power limit of the cross wind kites is proposed. Keywords: Power Limit, Crosswind Kites, Available Power, Aerodynamics 1. Introduction 2. Available Power Crosswind kite power is an emerging renewable energy In this section, the available power of the cross wind technology which uses kites or gliders to generate power kites will be derived. First, a classical aerodynamic model in high altitude wind flow. Compared to the conventional is presented and the passivity property of the aerodynamic wind turbine technology, the crosswind power systems can force is then proven. Physically, the passivity of the aero- achieve high-speed crosswind motion, which increase the dynamic force represents the power dissipated by the aero- power density significantly. Additionally, without the sup- dynamic force. Then available power of the crosswind kite port structure, the construction cost of such wind energy systems is then derived based on this property of the aero- system could be reduced compared to conventional tow- dynamic force. The derivation presented in this section ered wind turbines. This could eventually reduce the cost serves as a foundation of the power limit calculation of the of the wind energy dramatically. -
Design of a High Altitude Wind Power Generation System
A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science Design of a High Altitude Wind Power Generation System Imran Aziz Linköping University Institute of Technology Department of Management and Engineering Division of Machine Design Linköping University SE-581 83 Linköping Sweden 2013 ISRN: LIU-IEI-TEK-A--13/01725—SE Acknowledgements The work presented in this thesis has been carried out at the Division of Machine Design at the Department of Management and Engineering (IEI) at Linköping University, Sweden. I am very grateful to all the people who have supported me during the thesis work. First of all, I would like to express my sincere gratitude to my supervisors Edris Safavi, Doctoral student and Varun Gopinath, Doctoral student, for their continuous support throughout my study and research, for their guidance and constant supervision as well as for providing useful information regarding the thesis work. Special thanks to my examiner, Professor Johan Ölvander, for his encouragement, insightful comments and liberated guidance has been my inspiration throughout this thesis work. Last but not the least, I would like to thank my parents, especially my mother, for her unconditional love and support throughout my whole life. Linköping, June 2013 Imran Aziz i Abstract One of the key points to reduce the world dependence on fossil fuels and the emissions of greenhouse gases is the use of renewable energy sources. Recent studies showed that wind energy is a significant source of renewable energy which is capable to meet the global energy demands. However, such energy cannot be harvested by today’s technology, based on wind towers, which has nearly reached its economical and technological limits. -

Proceedings of the 2021 Airborne Wind Energy Workshop
Proceedings of the 2021 Airborne Wind Energy Workshop Jochem Weber, Melinda Marquis, Alexsandra Lemke, Aubryn Cooperman, Caroline Draxl, Anthony Lopez, Owen Roberts, and Matt Shields National Renewable Energy Laboratory NREL is a national laboratory of the U.S. Department of Energy Technical Report Office of Energy Efficiency & Renewable Energy NREL/TP-5000-80017 Operated by the Alliance for Sustainable Energy, LLC July 2021 This report is available at no cost from the National Renewable Energy Laboratory (NREL) at www.nrel.gov/publications. Contract No. DE-AC36-08GO28308 Proceedings of the 2021 Airborne Wind Energy Workshop Jochem Weber, Melinda Marquis, Alexsandra Lemke, Aubryn Cooperman, Caroline Draxl, Anthony Lopez, Owen Roberts, and Matt Shields National Renewable Energy Laboratory Suggested Citation Weber, Jochem, Melinda Marquis, Alexsandra Lemke, Aubryn Cooperman, Caroline Draxl, Anthony Lopez, Owen Roberts, and Matt Shields. 2021. Proceedings of the 2021 Airborne Wind Energy Workshop. Golden, CO: National Renewable Energy Laboratory. NREL/TP-5000-80017. https://www.nrel.gov/docs/fy21osti/80017.pdf. NREL is a national laboratory of the U.S. Department of Energy Technical Report Office of Energy Efficiency & Renewable Energy NREL/TP-5000-80017 Operated by the Alliance for Sustainable Energy, LLC July 2021 This report is available at no cost from the National Renewable Energy National Renewable Energy Laboratory Laboratory (NREL) at www.nrel.gov/publications. 15013 Denver West Parkway Golden, CO 80401 Contract No. DE-AC36-08GO28308 303-275-3000 • www.nrel.gov NOTICE This work was authored by the National Renewable Energy Laboratory, operated by Alliance for Sustainable Energy, LLC, for the U.S. Department of Energy (DOE) under Contract No. -
Design of a One Kilowatt Scale Kite Power System a Major Qualifying Project Report Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE
Project #: DJO - 0308 Design of a One Kilowatt Scale Kite Power System A Major Qualifying Project Report Submitted to the Faculty of the WORCESTER POLYTECHNIC INSTITUTE in partial fulfillment of the requirements for the Degree of Bachelor of Science In Aerospace Engineering SUBMITTED BY: __________________________ __________________________ Ryan Buckley Max Hurgin [email protected] [email protected] __________________________ __________________________ Chris Colschen Erik Lovejoy [email protected] [email protected] __________________________ __________________________ Nick Simone Michael DeCuir [email protected] [email protected] rd Date: April 23 , 2008 __________________________________ Professor David Olinger, Project Advisor 1 Abstract The goal of this project was to design and build a one-kilowatt scale system for generating power using a kite. Kite power has the potential to be more economical than using wind turbines because kites can fly higher than turbines can operate. At higher altitudes, wind speeds and available power are increased. In the developed system, a large windboarding kite pulls the end of a long rocking arm which turns a generator and creates electricity. This motion is repeated using a mechanism that changes the angle of attack of the kite during each cycle, thus varying its lift force and allowing a rocking motion of the arm. The end of the arm turns a shaft with a flywheel attached and spins a mounted generator, whose output then gets stored in batteries for later use. A Matlab simulation was used to predict a power output for the system of approximately one kilowatt. All sub-components of the system (power conversion mechanism, angle of attack mechanism, and kite control mechanism) have been lab tested. -
Renewable Energy Supply Value Only in the Queue of the Wind Speed Distribution, (I.E
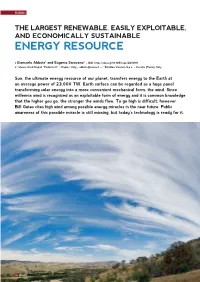
FEATURES THE LARGEST RENEWABLE, EASILY EXPLOITABLE, AND ECONOMICALLY SUSTAINABLE ENERGY RESOURCE 1 2 l Giancarlo Abbate and Eugenio Saraceno – DOI: https://doi.org/10.1051/epn/2018101 l 1 Universita` di Napoli “Federico II” – Naples, Italy – [email protected] — 2 KiteGen Venture S.p.a. – Caselle (Turin), Italy Sun, the ultimate energy resource of our planet, transfers energy to the Earth at an average power of 23,000 TW. Earth surface can be regarded as a huge panel transforming solar energy into a more convenient mechanical form, the wind. Since millennia wind is recognized as an exploitable form of energy and it is common knowledge that the higher you go, the stronger the winds flow. To go high is difficult; however Bill Gates cites high wind among possible energy miracles in the near future. Public awareness of this possible miracle is still missing, but today's technology is ready for it. 16 EPN 49/1 sustainable ENERGY RESOURCE FEATURES ropospheric Wind Energy or High Altitude Wind Energy (HAWE), also known as high- wind energy, is a vast and well-known kinetic Tenergy resource. The atmospheric stationary regime is powered by a percentage of the total mean solar radiation (230 W/m2 after reflection to space) around 2%. Gustavson in 1979 [1] estimated the power needed to maintain the stationary regime of the atmosphere as huge as 3,600 TW. Of the 3,600 TW figure, the near-surface wind resources available to wind turbines are in the range 25-70 TW, see figure 1. Near-surface wind and solar technologies also deal with low capacity factors. -

High Altitude Wind Power Systems: a Survey on Flexible Power Kites Mariam Ahmed, Ahmad Hably, Seddik Bacha
High Altitude Wind Power Systems: A Survey on Flexible Power Kites Mariam Ahmed, Ahmad Hably, Seddik Bacha To cite this version: Mariam Ahmed, Ahmad Hably, Seddik Bacha. High Altitude Wind Power Systems: A Survey on Flexible Power Kites. ICEM 2012 - XXth International Conference on Electrical Machines, Sep 2012, Marseille, France. pp.2083-2089. hal-00733723 HAL Id: hal-00733723 https://hal.archives-ouvertes.fr/hal-00733723 Submitted on 19 Sep 2012 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. High Altitude Wind Power Systems: A Survey on Flexible Power Kites Mariam Ahmed* Seddik Bacha*** Ahmad Hably** Grenoble Electrical Engineering Grenoble Electrical Engineering GIPSA-lab -ENSE3 BP 46 Laboratory (G2ELab) Laboratory (G2ELab) 38402 Saint-Martin d’Heres, 38402 Saint-Martin d’Heres, 38402 Saint-Martin d’Heres, France France France Abstract— High altitude wind energy (HAWE) is a new field of such a system. In section VI, methods of controlling of renewable energy that has received an increasing attention and optimizing kite-based systems are presented, and finally during the last decade. Many solutions were proposed to conclusions are made and further works are presented in harness this energy including the usage of kites, which were for a long time considered as child-toys. -
A GIS-Based Decision Support System for the Optimal Siting of Wind Farm Projects Yasin Sunak, Tim Höfer, Hafiz Siddique, Reinhard Madlener, Rik W
E.ON Energy Research Center Series A GIS-based Decision Support System for the Optimal Siting of Wind Farm Projects Yasin Sunak, Tim Höfer, Hafiz Siddique, Reinhard Madlener, Rik W. De Doncker Volume 7, Issue 2 E.ON Energy Research Center Series ISSN: 1868-7415 First Edition: Aachen, June 2015 E.ON Energy Research Center, RWTH Aachen University Mathieustraße 10 52074 Aachen Germany T +49 (0)241 80 49667 F +49 (0)241 80 49669 [email protected] www.eonerc.rwth-aachen.de E.ON Energy Research Center Series A GIS-based Decision Support System for the Optimal Siting of Wind Farm Projects Yasin Sunak, Tim Höfer, Hafiz Siddique, Reinhard Madlener, Rik W. De Doncker Volume 7, Issue 2 Table of Contents 1 INTRODUCTION ...............................................................................................................................2 1.1 Goals of the project .............................................................................................................................. 3 1.2 Positioning of the project within the E.ON ERC strategy ....................................................................... 4 2 WIND FARM SITING USING A SPATIAL ANALYTIC HIERARCHY PROCESS APPROACH: A CASE STUDY OF THE STÄDTEREGION AACHEN, ...........................................5 2.1 Background ........................................................................................................................................... 5 2.2 Multi-Criteria Decision-Making ............................................................................................................ -

Relaxation-Cycle Power Generation Systems Control Optimization Mariam Samir Ahmed
Relaxation-cycle power generation systems control optimization Mariam Samir Ahmed To cite this version: Mariam Samir Ahmed. Relaxation-cycle power generation systems control optimization. Electric power. Université de Grenoble, 2014. English. NNT : 2014GRENT019. tel-01282457 HAL Id: tel-01282457 https://tel.archives-ouvertes.fr/tel-01282457 Submitted on 3 Mar 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. THESE` pour obtenir le grade de DOCTEUR DE L’UNIVERSITE´ DE GRENOBLE Sp´ecialit´e: G´enie Electrique´ Arrˆet´eminist´eriel : 7 aoˆut 2006 Present´ ee´ par Mariam Samir AHMED These` dirigee´ par Prof. Seddik BACHA et coencadree´ par Dr. Ahmad HABLY prepar´ ee´ au sein du Grenoble G´enie Electrique´ Laboratoire (G2ELAB) En collaboration avec Grenoble Images Parole Signal Automatique Laboratory (GIPSA-Lab) dans l’Ecole´ Doctorale:Electronique, Electrotechnique, Automatique, T´el´ecommunication et Signal Optimisation de Contrˆole Commande des Syst`emes de G´en´eration d’Electricit´e`aCycle´ de Relaxation These` soutenue publiquement le 28 F´evrier 2014, devant le jury compose´ de: M. Brayima DAKYO Professeur `al’Universit´edu Havre, France, Pr´esident M. Mohamed BENBOUZID Professeur `al’Universit´ede Brest, Rapporteur M. -

Kitegen Research High Altitude Wind Generation Tropospheric Wind Exploitation Under Structural and Technological Constraints
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/331312828 KiteGen Research High Altitude Wind Generation Tropospheric Wind Exploitation Under Structural and Technological Constraints Method · January 2019 DOI: 10.13140/RG.2.2.12701.97766 CITATIONS READS 0 2 1 author: Massimo Ippolito KiteGen 7 PUBLICATIONS 82 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: Fabrication methods and tooling for semi-rigid power wings production View project All content following this page was uploaded by Massimo Ippolito on 24 February 2019. The user has requested enhancement of the downloaded file. KiteGen Research High Altitude Wind Generation Tropospheric Wind Exploitation Under Structural and Technological Constraints. C001-2019-98 Version 2.1 Created 2013/11 Cherubini, Ippolito Revised 2016/01 - Ippolito Authors Massimo Ippolito Eugenio Saraceno Doc Name C001-2019-98- Tropospheric wind exploitation under structural and technological constraints.docx Comments to: [email protected] Status Last Revision 30 January 2019 Access P Abstract Among renewable energy sources, high altitude wind power has gained incredible attention triggered by KiteGen’s first and successful empirical experiments in 2006. KiteGen planned and committed to design and validate an industrial scale generator, investing 200 man/years on the project, completing the research and adopting for development a special machine design methodology. KiteGen offers superior strength, steadiness, and coverage compared to traditional wind turbines and the LCOE could be the lowest since oil’s golden age, an unprecedented accomplishment. Baseload behaviour is the most desired feature for truly renewable energy, and up until now, only hydroelectric power has been suitable to fulfill this requirement. -

High Altitude Wind Power Systems: a Survey on Flexible Power Kites Mariam Ahmed, Ahmad Hably, Seddik Bacha
High Altitude Wind Power Systems: A Survey on Flexible Power Kites Mariam Ahmed, Ahmad Hably, Seddik Bacha To cite this version: Mariam Ahmed, Ahmad Hably, Seddik Bacha. High Altitude Wind Power Systems: A Survey on Flexible Power Kites. XXth International Conference on Electrical Machines (ICEM’2012), Sep 2012, Marseille, France. pp.2083-2089. hal-00733723 HAL Id: hal-00733723 https://hal.archives-ouvertes.fr/hal-00733723 Submitted on 19 Sep 2012 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. High Altitude Wind Power Systems: A Survey on Flexible Power Kites Mariam Ahmed* Seddik Bacha*** Ahmad Hably** Grenoble Electrical Engineering Grenoble Electrical Engineering GIPSA-lab -ENSE3 BP 46 Laboratory (G2ELab) Laboratory (G2ELab) 38402 Saint-Martin d’Heres, 38402 Saint-Martin d’Heres, 38402 Saint-Martin d’Heres, France France France Abstract— High altitude wind energy (HAWE) is a new field of such a system. In section VI, methods of controlling of renewable energy that has received an increasing attention and optimizing kite-based systems are presented, and finally during the last decade. Many solutions were proposed to conclusions are made and further works are presented in harness this energy including the usage of kites, which were for a long time considered as child-toys.