19800003556.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Hacker's Handbook for Ringzer0 Training, by Steve Lord
Hacker’s Handbook For Ringzer0 Training, by Steve Lord This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Copyright ©2021 Raw Hex Ltd. All Rights Reserved. Retro Zer0 is a trademark of Ring Zer0 Training. Raw Hex is a trademark of Raw Hex Ltd. All other trademarks are the property of their respective owners. Raw Hex Ltd reserve the right to make changes or improvements to equipment, software and documentation herein described at any time and without notice. Notice: Please be advised that your Retro Zer0 has no warranty, and that tampering with the internal hardware and software of your Ring Zer0 is widely encouraged as long as you do so with appropriate regard to safety. Contents 1 Preface 5 1.1 Safety ........................... 6 1.2 Understanding This Document ............ 6 2 Before You Start 7 2.1 Check You Have Everything .............. 7 2.2 Back Up The SD Card ................. 8 2.3 Connecting Up Your Retro Zer0 ............ 8 2.4 Powering Up ....................... 10 2.5 Resetting Your Retro Zer0 . 10 2.6 Powering Down ..................... 10 3 First Steps 11 3 4 CONTENTS 3.1 Testing The Keyboard . 11 3.2 Using CP/M ....................... 12 3.3 Would You Like To Play A Game? . 14 3.4 MultiCPM Extras ..................... 17 3.5 Useful Tools ....................... 19 3.6 What’s On The Card? . 20 3.7 Putting It All Together . 23 3.8 Where To Read More . 25 4 Being Productive With Retro Zer0 27 4.1 WordStar .........................27 4.2 Supercalc .........................30 4.3 DBase ...........................32 4.4 Microsoft BASIC .....................32 4.5 Turbo Pascal .......................34 4.6 Forth 83 .........................36 4.7 ZDE ............................38 4.8 Z80 Assembler .....................39 4.9 Hi-Tech C .........................43 4.10 XLisp ...........................46 CONTENTS 5 4.11 Installing New Software . -

BASIC Programs for Computing Displacements, Strains, and Tilts from Quadrilateral Measurements
DEPARTMENT OF THE INTERIOR U.S. GEOLOGICAL SURVEY BASIC programs for computing displacements, strains, and tilts from quadrilateral measurements by Arvid M. Johnson and r> Rex L. Baum Open-File Report 87-3^3 Any use of trade names in this report is for descriptive purposes only and does not imply endorsement by the U.S. Geological Survey. This report is preliminary and has not been reviewed for conformity with U.S. Geological Survey editorial standards. University of Cincinnati (M.L. 13) U.S. Geological Survey Cincinnati, Ohio M5221 Box 250H6, MS 966 Denver, CO 80225 1987 INTRODUCTION Since 1983, we have been using quadrilaterals defined by survey stakes (fig. 1) to measure displacements, strains, and tilts at the surfaces of landslides. A companion paper will describe the use of quadrilaterals and give derivations of the equations needed to compute displacements, strains, and tilts. This report provides user instructions for, and listings of, BASIC programs that perform the computations. It is assumed that the reader is familiar with MBASIC and CP/M. However, we have tried to make the user instructions complete and step by step so that the average user can run the programs successfully. B (a) (b) Figure 1. Quadrilateral, (a) Isometric view showing survey stakes on a hillside, (b) Plan view. By convention, stake A has the highest elevation and the other stakes are named B, C, and D in clockwise rotation from A. In the field, the slope distance between each pair of stakes and the elevation of each stake is measured. The azimuth of line AC is used to orient the data. -

Mbasic Vt180, Vs.21 Getting Started with Mbasic Vt180
MBASIC VT180, VS.21 GETTING STARTED WITH MBASIC VT180 AA-P22SA-TV MBASIC VTlS0, VS.21 GETTING STARTED WITH MBASIC VT180 AA-P22SA-TV developed by MICROSOFT CORPORATION Bellevue, Washing ton DIGITAL EQUIPMENT CORPORATION Maynard, Massachusetts / .. The information in this document is subject to change without notice and should not be construed as a com mitment by Digital Equipment Corporation. Digital Equipment Corporation assumes no responsibility for any errors that may appear in this document. The software described in this document is furnished under a license and may only be used or copied in accordance with the terms of such license. No responsibility is assumed for the. use or reliability of software by DIGITAL or its affiliated companies. Copyr ig ht @ 1981, MICROSOFT CORPORATION Licensed to DIGITAL EQUIPMENT CORPORATION, Maynard, Massachusetts. The following are trademarks of Digital Equipment Corporation: ASSIST DIGITAL RSTS COMPUTER LABS EDUsystem RSX COMTEX FLIP CHIP RTS-8 DATATRIEVE FOCAL SBI DDT lAS TMS-ll DEC INDAC TRAX DECCOMM ITPS-IO TYPESET-8 DECmate LAB-8 TYPESET-II DECnet MASSBUS UNIBUS DECSYSTEM-IO OMNIBUS VAX DECSYSTEM-20 OS/8 VMS DECtape PDP VT DECUS PDT Work Processor DECwriter PHA VT180 DIBOL CP/M is a trademark of Digital Research PRODUCT EXCEPTION REPORTING SERVICE: If, prior to SEPTEMBER 1, 1983, the customer encounters a problem wi th the software as orig inally furnished, a Product Exception Report may be submitted to: Digital Equipment Corporation BOX A 146 Main Street Maynard, MA 01754 Through the software authors, DIGITAL will, wi thout addi tional charg e, respond to the reported error in the current unaltered release of the software by issuing any known correction informa tion to the customer reporting the problem and/or issuing notice of the availability of corrected code. -

{PDF EPUB} Learning IBM Basic: for the Personal Computer by David A
Read Ebook {PDF EPUB} Learning IBM Basic: For the Personal Computer by David A. Lien Learning IBM Basic: For the Personal Computer [Lien, David A.] on Amazon.com. *FREE* shipping on qualifying offers. Learning IBM Basic: For the Personal Computer5/5(1)Format: PaperbackAuthor: David A. LienLearning IBM BASIC for the personal computer : Lien, David ...https://archive.org/details/learningibmbasic00lienLearning IBM BASIC for the personal computer Item Preview remove-circle Share or Embed This Item. ... Learning IBM BASIC for the personal computer by Lien, David A. (David Alvin), 1934-Publication date 1984 Topics IBM Personal Computer, BASIC (Computer program language), ComputersPages: 520Learning IBM BASIC for the personal computer (Book, 1985 ...https://www.worldcat.org/title/learning-ibm-basic...Get this from a library! Learning IBM BASIC for the personal computer. [David A Lien] Learning IBM BASIC For The Personal Computer: ISBN: 0-932760-13-9: Author: David A. Lien: Publisher: Compusoft Publishing: Price: $19.95: First Printing: 1984: Number of Pages: 496 Learning IBM BASIC for the Personal Computer by David A. Lien A copy that has been read, but remains in clean condition. All pages are intact, and the cover is intact. The spine may show signs of wear. Pages can include limited notes and highlighting, and the copy … Learning IBM Basic: For the Personal Computer Nov 1, 1983. by David A. Lien Paperback. $23.99. Only 1 left in stock - order soon. ... by David Lien Paperback. $3.76. More Buying Choices $3.76 ... Aug 22, 2008 · Author of MS-DOS, The BASIC handbook, an encyclopedia of the BASIC computer language, The BASIC handbook, Learning BASIC for Tandy computers, Learning Apple II BASIC, The IBM BASIC handbook, The Tandy 200 portable computer, Learning Microsoft BASIC for the MacintoshWritten works: Learning IBM Basic: For the Personal ComputerBooks by David A. -

GWBASIC User's Manual
GWBASIC User's Manual User's Guide GW-BASIC User's Guide Chapters 1. Welcome Microsoft Corporation 2. Getting Started Information in this document is subject to change without 3. Reviewing and Practicing notice and does not represent a commitment on the part of 4. The Screen Editor Microsoft Corporation. The software described in this 5. Creating and Using Files document is furnished under a license agreement or 6. Constants, Variables, nondisclosure agreement. It is against the law to copy this Expressions and Operators software on magnetic tape, disk, or any other medium for any Appendicies purpose other than the purchaser's personal use. A. Error Codes and Messages © Copyright Microsoft Corporation, 1986, 1987. All rights B. Mathematical Functions reserved. C. ASCII Character Codes D. Assembly Language Portions copyright COMPAQ Computer Corporation, 1985 E. Converting Programs Simultaneously published in the United States and Canada. F. Communications G. Hexadecimal Equivalents Microsoft®, MS-DOS®, GW-BASIC® and the Microsoft logo H. Key Scan Codes are registered trademarks of Microsoft Corporation. I. Characters Recognized Compaq® is a registered trademark of COMPAQ Computer Glossary Corporation. DEC® is a registered trademark of Digital Equipment Corporation. User's Reference Document Number 410130001-330-R02-078 ABS Function ASC Function ATN Function GW-BASIC User's Reference AUTO Command Microsoft Corporation BEEP Statement BLOAD Command Information in this document is subject to change without BSAVE Command notice and does not represent a commitment on the part of Microsoft Corporation. The software described in this CALL Statement document is furnished under a license agreement or CDBL Function nondisclosure agreement. -

Learn Visual Basic 6.0
Learn Visual Basic 6.0 Beginners All Purpose Symbolic Instruction Code MBasic GW Basic Q Basic Basic VB 32 Years It is a text based language Definition of Visual Basic Visual Basic is a powerful windows programming language that has been developed by Microsoft Corporation . Visual Basic is a powerful language to develop windows application very quickly . It is one of the rapid application development tools that lets the programmer develop windows application very easily . Visual basic is a originally developed from a computer language called basic. The basic was a text based language , means there was no graphical facility as it is in windows. Some Features of Visual Basic Þ Full set of objects - you 'draw' the application Þ Lots of icons and pictures for your use Þ Response to mouse and keyboard actions Þ Clipboard and printer access Þ Full array of mathematical, string handling, and graphics functions Þ Can handle fixed and dynamic variable and control arrays Þ Sequential and random access file support Þ Useful debugger and error-handling facilities Þ Powerful database access tools Þ ActiveX support Þ Package & Deployment Wizard makes distributing your applications simple Visual Basic 6.0 versus Other Versions of Visual Basic The original Visual Basic for DOS and Visual Basic For Windows were introduced in 1991. · Visual Basic 3.0 (a vast improvement over previous versions) was released in 1993. · Visual Basic 4.0 released in late 1995 (added 32 bit application support). · Visual Basic 5.0 released in late 1996. New environment, supported creation of ActiveX controls, deleted 16 bit application support. -

North-Star-Advantage-Product-Brochure
Integrated Desk Top Computer with 12 inch other parallel devices, a serial (RS-232C) port or a North Bit-Mapped Graphics or Character Display, Star Floating Point Board (FPB) for substantial compu tational performance increase. Sufficient power (llSV 64Kb RAM, 4 MHz Z80A~ Two Quad Capacity or 230V, 60 or 50 Hz) is also contained within the light Floppy Disk Drives, Selectric®Style 87 Key weight chassis. Keyboard, Business Graphics Software Included with the ADVANTAGE system is a system diskette containing a Business Graphics package, a The North Star ADVANTAGE™ is an interactive integrated complete system diagnostic program and a Graphics Demo graphics computer supplying the single user with a package. balanced set of Business-Data, Word, or Scientific-Data This powerful, compact and self-sufficient computer processing capabilities along with both character and is further enhanced by a broad selection of Systems and graphics output. ADVANTAGE is fully supported by North Application software. For the business user North Star Star's wide range of System and Application Software. offers proprietary Application Software modules con The ADVANTAGE contains a 4 MHz Z80A®CPU with trolled by North Star's proprietary Application Support 64Kb of 200 nsec Dynamic RAM (with parity) for program Program (ASP). For a wide variety of commercial, storage, a separate 20Kb 200 nsec RAM to drive the bit scientific or industrial applications North Star's graphics mapped display, a 2Kb bootstrap PROM and an auxiliary version of the industry standard CP! M® is offered. For Intel 8035 microprocessor to control the keyboard and the computation-intensive or graphics-intensive appli floppy disks. -
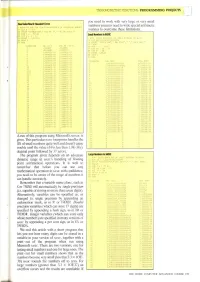
A Run of This Program Using Microsoft's MBASIC Is Given. This Particular
TRIGONOMETRIC FUNCTIONS. PROGRAMMING PROJECTS 1, you need to work with very large or very small Sine Underflow Or Reundoff Errors I numbers you may need to write special arithmetic REM 'I F.ST FUR SIN FUNC'1' ION ROUNDOFF 3R U0DERFLOW ERRORS IC LET X - 1 0/6 routines to overcome these limitations. 2C PRINT "ITERATION"," 951. OF X"," VOL OF 616(0)" 3C FOR I - : TO 40 Numbers In BASIC 4C LET 8 = E / 1 0 Small 5C PRIRT 1,1,SINIX) : REM TESTS HANDLING OF SMALL NUMBERS IN BASIC 6C NEXT I 0 L111' 821 ..0(303335333333321 7C END 20 PRINT "ITP.RAF30N"," 082. PREC",7 "," SNGL IRE(" 30 PRINT CAL OF S1N?X) I TERATION VAL CF 8 00 FOR I I TO 40 1 .166667 .165896 50 LET X8 - %M / 10 2 , 0166667 , 0166659 60 LET U! • SN 1.666676-03 3 1 . 66C•67F.-03 '0 PRINT 1,X0,X! 4 1.666670-04 1.66667E-0. 80 NE:(T 1 5 1.666676.-05 1.666676.-05 90 EN3. 6 1 . 66667E-06 1.66667E-06 7 1.66667E-07 1.66667E-0? .TERATION DBL PREC SNGL PREC 8 1,66667E-08 1,66667E-08 1 ,000003333333333 3.333330-06 9 1.66667E-69 1.66667E-09 2 . 0000003'333333333 3.333330-07 1 0 1.666670.-30 1.666676-IO 3 3.333333333D-08 3.33333E-08 11 1.66667E-II 1.66667E-11 4 3.3333333330-09 3.33337E-09 1 2'' 1.666670-12 1.666670-12 5 3.333333333D-1C 3,33333E-10 1.66667E-13 1 3'' 1.666670.-13 6 3.333333333D-11 3.333336.-ll 1.666676-1. -
BASIC Reference Manual for SVI-318/328
SPECTRAVIDEO BASIC REFERENCE MANUAL Information in this document is subject to change without notice and does not represent a commitment on th e part of Microsoft, Inc, The software des cribed in the document is furnished under a license agreement or no n-disclosure ag reement. The software may be used or copied only in accordance with the terms of the agreement. It is agairtst the law to copy Microsoft BASIC on cassette tape, disk, or any other medium for any purpose other than the purchaser's personal use. BASIC by MICROSOFT Published by SPECTRAVIDEO INTERNATIONAL LIMITED Second Edition First Printing 1984 Printed in Hong Kong Copyright (C) 1984 Spectravideo International Limited. All rights reserved. Spectravideo International Limited shall not be liab le for technical or editorial omissions made herein; nor for incidental or consequential damages resulting from the furnishing, performance or use of this manual. This book contains proprietary information protected by copyright. All rights reserved. No part of this book may be rep roduced or utilized in any form or by any mea ns, elect ronic or mechanical, including photocopying, recording or by any in formation storage or retrieval system without permission in writing from Spect ravideo International Limited. Printed in Hong Kong Price: US$19.95 SVI-318/328-BRM i This manual assumes the reader has some knowledge of the programm ing language, BASIC . It is recommended that the reader ha s BASIC up and running as this manual is read through, to try out those commands and programs given as examples . Chapter 1 explains the various versions of BASIC. -
The Commodore 128 1 What's in This Book 2 the Commodore 128: Three Computers in One 3 the C128 Mode 6 the CP/M Mode 9 the Bottom Line 9
The Official Book T {&~ Commodore \! 128 Personal Computer - - ------~-----...::.......... Mitchell Waite, Robert Lafore, and Jerry Volpe The Official Book ~~ Commodore™128 Personal Computer Howard W. Sams & Co., Inc. A Subsidiary of Macmillan, Inc. 4300 West 62nd Street, Indianapolis, Indiana 46268 U.S.A. © 1985 by The Waite Group, Inc. FIRST EDITION SECOND PRINTING - 1985 All rights reserved. No part of this book shall be reproduced, stored in a retrieval system, or transmitted by any means, electronic, mechanical. photocopying, recording, or otherwise, with out written permission from the publisher. No patent liability is assumed with respect to the use of the information contained herein. While every precaution has been taken in the preparation of this book, the publisher assumes no responsibility for errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained herein. International Standard Book Number: 0-672-22456-9 Library of Congress Catalog Card Number: 85-50977 Illustrated by Bob Johnson Typography by Walker Graphics Printed in the United States of America The Waite Group has made every attempt to supply trademark information about company names, products, and services mentioned in this book. The trademarks indicated below were derived from various sources. The Waite Group cannot attest to the accuracy of this information. 8008 and Intel are trademarks of Intel Corp. Adventure is a trademark of Adventure International. Altair 8080 is a trademark of Altair. Apple II is a registered trademark of Apple Computer, Inc. Atari and Atari 800 are registered trademarks of Atari Inc. Automatic Proofreader is a trademark of COMPUTE! Publications. -
Mbasic Manual
User’sUser’s GuideGuide Learn to Program PIC Micrcontrollers in easy to use Basic Revision 5.2 Warranty Basic Micro warranties its products against defects in material and workmanship for a period of 90 days. If a defect is discovered, Basic Micro will at our discretion repair, replace, or refund the purchase price of the product in question. Contact us at [email protected] No returns will be accepted without the proper authorization. Copyrights and Trademarks Copyright© 2001-2002 by Basic Micro, Inc. All rights reserved. PICmicro® is a trademark of Microchip Technology, Inc. Basic Stamp I/II and Parallax are registered trademarks of Parallax Inc. MBasic, The Atom and Basic Micro are registered trademarks of Basic Micro Inc. Other trademarks mentioned are registered trademarks of their respective holders. Disclaimer Basic Micro cannot be held responsible for any incidental, or consequential damages resulting from use of products manufactured or sold by Basic Micro or its distributors. No products from Basic Micro should be used in any medical devices and/or medical situations. No product should be used in a life support situation. Contacts Email: [email protected] Tech support: [email protected] Web: http://www.basicmicro.com Discussion List A web based discussion board is maintained at http://www.basicmicro.com Updates In our continuing effort to provide the best and most innovative products, software updates are made available by contacting us at [email protected] Table of Contents 5 Table of Contents Contents Introduction -
G a M E S F E a T U
Games Feature 74470 16901 O IMAkES P/XpERWORk PANdEIVIONiuiVI VANish MAGIC WINDOW II turns your APPLE in And as an extra assurance that your system. MAGIC MAILER lets you insert to a sophisticated word processor. But document is perfect before printing and each name and address (or whatever is in because MAGIC WINDOW II operates so mailing, you can use MAGIC WORDS. your records) into your document quickly much like a standard typewriter, it’s ex With incredible speed, MAGIC WORDS and efficiently. tremely simple to use. In fact, because of proofreads your document for spelling er With MAGIC MAILER, you never have to its unique menu structure, it’s the easiest rors and typos, shows you each one in con retype a document or an internal address. to learn, and function selection is virtually text on the screen, and allows you to cor With just a few keystrokes, each letter error free. rect or ignore each in sequence. Unlike any becomes an original, and the final phase other spelling checker, it will then auto MAGIC WINDOW Il’s powerful word pro of the paperwork process is complete — matically create a corrected file as you go cessing features include automatic format efficiently and to perfection. so you never need to return to MAGIC WIN ting, editing, centering, and justification — Let's face it: The letters, invoices, and DOW II to update it yourself manually. Or. and these are all done easily “on the video other documents you send out represent screen” before you ever print. Just type if you're busy.