NEWTON's FIRST LAW of MOTION the Law of INERTIA
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Foundations of Newtonian Dynamics: an Axiomatic Approach For
Foundations of Newtonian Dynamics: 1 An Axiomatic Approach for the Thinking Student C. J. Papachristou 2 Department of Physical Sciences, Hellenic Naval Academy, Piraeus 18539, Greece Abstract. Despite its apparent simplicity, Newtonian mechanics contains conceptual subtleties that may cause some confusion to the deep-thinking student. These subtle- ties concern fundamental issues such as, e.g., the number of independent laws needed to formulate the theory, or, the distinction between genuine physical laws and deriva- tive theorems. This article attempts to clarify these issues for the benefit of the stu- dent by revisiting the foundations of Newtonian dynamics and by proposing a rigor- ous axiomatic approach to the subject. This theoretical scheme is built upon two fun- damental postulates, namely, conservation of momentum and superposition property for interactions. Newton’s laws, as well as all familiar theorems of mechanics, are shown to follow from these basic principles. 1. Introduction Teaching introductory mechanics can be a major challenge, especially in a class of students that are not willing to take anything for granted! The problem is that, even some of the most prestigious textbooks on the subject may leave the student with some degree of confusion, which manifests itself in questions like the following: • Is the law of inertia (Newton’s first law) a law of motion (of free bodies) or is it a statement of existence (of inertial reference frames)? • Are the first two of Newton’s laws independent of each other? It appears that -

Exercises in Classical Mechanics 1 Moments of Inertia 2 Half-Cylinder
Exercises in Classical Mechanics CUNY GC, Prof. D. Garanin No.1 Solution ||||||||||||||||||||||||||||||||||||||||| 1 Moments of inertia (5 points) Calculate tensors of inertia with respect to the principal axes of the following bodies: a) Hollow sphere of mass M and radius R: b) Cone of the height h and radius of the base R; both with respect to the apex and to the center of mass. c) Body of a box shape with sides a; b; and c: Solution: a) By symmetry for the sphere I®¯ = I±®¯: (1) One can ¯nd I easily noticing that for the hollow sphere is 1 1 X ³ ´ I = (I + I + I ) = m y2 + z2 + z2 + x2 + x2 + y2 3 xx yy zz 3 i i i i i i i i 2 X 2 X 2 = m r2 = R2 m = MR2: (2) 3 i i 3 i 3 i i b) and c): Standard solutions 2 Half-cylinder ϕ (10 points) Consider a half-cylinder of mass M and radius R on a horizontal plane. a) Find the position of its center of mass (CM) and the moment of inertia with respect to CM. b) Write down the Lagrange function in terms of the angle ' (see Fig.) c) Find the frequency of cylinder's oscillations in the linear regime, ' ¿ 1. Solution: (a) First we ¯nd the distance a between the CM and the geometrical center of the cylinder. With σ being the density for the cross-sectional surface, so that ¼R2 M = σ ; (3) 2 1 one obtains Z Z 2 2σ R p σ R q a = dx x R2 ¡ x2 = dy R2 ¡ y M 0 M 0 ¯ 2 ³ ´3=2¯R σ 2 2 ¯ σ 2 3 4 = ¡ R ¡ y ¯ = R = R: (4) M 3 0 M 3 3¼ The moment of inertia of the half-cylinder with respect to the geometrical center is the same as that of the cylinder, 1 I0 = MR2: (5) 2 The moment of inertia with respect to the CM I can be found from the relation I0 = I + Ma2 (6) that yields " µ ¶ # " # 1 4 2 1 32 I = I0 ¡ Ma2 = MR2 ¡ = MR2 1 ¡ ' 0:3199MR2: (7) 2 3¼ 2 (3¼)2 (b) The Lagrange function L is given by L('; '_ ) = T ('; '_ ) ¡ U('): (8) The potential energy U of the half-cylinder is due to the elevation of its CM resulting from the deviation of ' from zero. -

Post-Newtonian Approximation
Post-Newtonian gravity and gravitational-wave astronomy Polarization waveforms in the SSB reference frame Relativistic binary systems Effective one-body formalism Post-Newtonian Approximation Piotr Jaranowski Faculty of Physcis, University of Bia lystok,Poland 01.07.2013 P. Jaranowski School of Gravitational Waves, 01{05.07.2013, Warsaw Post-Newtonian gravity and gravitational-wave astronomy Polarization waveforms in the SSB reference frame Relativistic binary systems Effective one-body formalism 1 Post-Newtonian gravity and gravitational-wave astronomy 2 Polarization waveforms in the SSB reference frame 3 Relativistic binary systems Leading-order waveforms (Newtonian binary dynamics) Leading-order waveforms without radiation-reaction effects Leading-order waveforms with radiation-reaction effects Post-Newtonian corrections Post-Newtonian spin-dependent effects 4 Effective one-body formalism EOB-improved 3PN-accurate Hamiltonian Usage of Pad´eapproximants EOB flexibility parameters P. Jaranowski School of Gravitational Waves, 01{05.07.2013, Warsaw Post-Newtonian gravity and gravitational-wave astronomy Polarization waveforms in the SSB reference frame Relativistic binary systems Effective one-body formalism 1 Post-Newtonian gravity and gravitational-wave astronomy 2 Polarization waveforms in the SSB reference frame 3 Relativistic binary systems Leading-order waveforms (Newtonian binary dynamics) Leading-order waveforms without radiation-reaction effects Leading-order waveforms with radiation-reaction effects Post-Newtonian corrections Post-Newtonian spin-dependent effects 4 Effective one-body formalism EOB-improved 3PN-accurate Hamiltonian Usage of Pad´eapproximants EOB flexibility parameters P. Jaranowski School of Gravitational Waves, 01{05.07.2013, Warsaw Relativistic binary systems exist in nature, they comprise compact objects: neutron stars or black holes. These systems emit gravitational waves, which experimenters try to detect within the LIGO/VIRGO/GEO600 projects. -

Kinematics, Kinetics, Dynamics, Inertia Kinematics Is a Branch of Classical
Course: PGPathshala-Biophysics Paper 1:Foundations of Bio-Physics Module 22: Kinematics, kinetics, dynamics, inertia Kinematics is a branch of classical mechanics in physics in which one learns about the properties of motion such as position, velocity, acceleration, etc. of bodies or particles without considering the causes or the driving forces behindthem. Since in kinematics, we are interested in study of pure motion only, we generally ignore the dimensions, shapes or sizes of objects under study and hence treat them like point objects. On the other hand, kinetics deals with physics of the states of the system, causes of motion or the driving forces and reactions of the system. In a particular state, namely, the equilibrium state of the system under study, the systems can either be at rest or moving with a time-dependent velocity. The kinetics of the prior, i.e., of a system at rest is studied in statics. Similarly, the kinetics of the later, i.e., of a body moving with a velocity is called dynamics. Introduction Classical mechanics describes the area of physics most familiar to us that of the motion of macroscopic objects, from football to planets and car race to falling from space. NASCAR engineers are great fanatics of this branch of physics because they have to determine performance of cars before races. Geologists use kinematics, a subarea of classical mechanics, to study ‘tectonic-plate’ motion. Even medical researchers require this physics to map the blood flow through a patient when diagnosing partially closed artery. And so on. These are just a few of the examples which are more than enough to tell us about the importance of the science of motion. -

Newton.Indd | Sander Pinkse Boekproductie | 16-11-12 / 14:45 | Pag
omslag Newton.indd | Sander Pinkse Boekproductie | 16-11-12 / 14:45 | Pag. 1 e Dutch Republic proved ‘A new light on several to be extremely receptive to major gures involved in the groundbreaking ideas of Newton Isaac Newton (–). the reception of Newton’s Dutch scholars such as Willem work.’ and the Netherlands Jacob ’s Gravesande and Petrus Prof. Bert Theunissen, Newton the Netherlands and van Musschenbroek played a Utrecht University crucial role in the adaption and How Isaac Newton was Fashioned dissemination of Newton’s work, ‘is book provides an in the Dutch Republic not only in the Netherlands important contribution to but also in the rest of Europe. EDITED BY ERIC JORINK In the course of the eighteenth the study of the European AND AD MAAS century, Newton’s ideas (in Enlightenment with new dierent guises and interpre- insights in the circulation tations) became a veritable hype in Dutch society. In Newton of knowledge.’ and the Netherlands Newton’s Prof. Frans van Lunteren, sudden success is analyzed in Leiden University great depth and put into a new perspective. Ad Maas is curator at the Museum Boerhaave, Leiden, the Netherlands. Eric Jorink is researcher at the Huygens Institute for Netherlands History (Royal Dutch Academy of Arts and Sciences). / www.lup.nl LUP Newton and the Netherlands.indd | Sander Pinkse Boekproductie | 16-11-12 / 16:47 | Pag. 1 Newton and the Netherlands Newton and the Netherlands.indd | Sander Pinkse Boekproductie | 16-11-12 / 16:47 | Pag. 2 Newton and the Netherlands.indd | Sander Pinkse Boekproductie | 16-11-12 / 16:47 | Pag. -

The Newton-Leibniz Controversy Over the Invention of the Calculus
The Newton-Leibniz controversy over the invention of the calculus S.Subramanya Sastry 1 Introduction Perhaps one the most infamous controversies in the history of science is the one between Newton and Leibniz over the invention of the infinitesimal calculus. During the 17th century, debates between philosophers over priority issues were dime-a-dozen. Inspite of the fact that priority disputes between scientists were ¡ common, many contemporaries of Newton and Leibniz found the quarrel between these two shocking. Probably, what set this particular case apart from the rest was the stature of the men involved, the significance of the work that was in contention, the length of time through which the controversy extended, and the sheer intensity of the dispute. Newton and Leibniz were at war in the later parts of their lives over a number of issues. Though the dispute was sparked off by the issue of priority over the invention of the calculus, the matter was made worse by the fact that they did not see eye to eye on the matter of the natural philosophy of the world. Newton’s action-at-a-distance theory of gravitation was viewed as a reversion to the times of occultism by Leibniz and many other mechanical philosophers of this era. This intermingling of philosophical issues with the priority issues over the invention of the calculus worsened the nature of the dispute. One of the reasons why the dispute assumed such alarming proportions and why both Newton and Leibniz were anxious to be considered the inventors of the calculus was because of the prevailing 17th century conventions about priority and attitude towards plagiarism. -

New Rotational Dynamics- Inertia-Torque Principle and the Force Moment the Character of Statics Guagsan Yu* Harbin Macro, Dynamics Institute, P
Computa & tio d n ie a l l p M Yu, J Appl Computat Math 2015, 4:3 p a Journal of A t h f e o m l DOI: 10.4172/2168-9679.1000222 a a n t r ISSN: 2168-9679i c u s o J Applied & Computational Mathematics Research Article Open Access New Rotational Dynamics- Inertia-Torque Principle and the Force Moment the Character of Statics GuagSan Yu* Harbin Macro, Dynamics Institute, P. R. China Abstract Textual point of view, generate in a series of rotational dynamics experiment. Initial research, is wish find a method overcome the momentum conservation. But further study, again detected inside the classical mechanics, the error of the principle of force moment. Then a series of, momentous the error of inside classical theory, all discover come out. The momentum conservation law is wrong; the newton third law is wrong; the energy conservation law is also can surpass. After redress these error, the new theory namely perforce bring. This will involve the classical physics and mechanics the foundation fraction, textbooks of physics foundation part should proceed the grand modification. Keywords: Rigid body; Inertia torque; Centroid moment; Centroid occurrence change? The Inertia-torque, namely, such as Figure 3 the arm; Statics; Static force; Dynamics; Conservation law show, the particle m (the m is also its mass) is a r 1 to O the slewing radius, so it the Inertia-torque is: Introduction I = m.r1 (1.1) Textual argumentation is to bases on the several simple physics experiment, these experiments pass two videos the document to The Inertia-torque is similar with moment of force, to the same of proceed to demonstrate. -

Lecture Notes for PHY 405 Classical Mechanics
Lecture Notes for PHY 405 Classical Mechanics From Thorton & Marion's Classical Mechanics Prepared by Dr. Joseph M. Hahn Saint Mary's University Department of Astronomy & Physics November 25, 2003 revised November 29 Chapter 11: Dynamics of Rigid Bodies rigid body = a collection of particles whose relative positions are fixed. We will ignore the microscopic thermal vibrations occurring among a `rigid' body's atoms. The inertia tensor Consider a rigid body that is composed of N particles. Give each particle an index α = 1 : : : N. Particle α has a velocity vf,α measured in the fixed reference frame and velocity vr,α = drα=dt in the reference frame that rotates about axis !~ . Then according to Eq. 10.17: vf,α = V + vr,α + !~ × rα where V = velocity of the moving origin relative to the fixed origin. Note that the particles in a rigid body have zero relative velocity, ie, vr,α = 0. 1 Thus vα = V + !~ × rα after dropping the f subscript 1 1 and T = m v2 = m (V + !~ × r )2 is the particle's KE α 2 α α 2 α α N so T = Tα the system's total KE is α=1 X1 1 = MV2 + m V · (!~ × r ) + m (!~ × r )2 2 α α 2 α α α α X X 1 1 = MV2 + V · !~ × m r + m (!~ × r )2 2 α α 2 α α α ! α X X where M = α mα = the system's total mass. P Now choose the system's center of mass R as the origin of the moving frame. -

Guide for the Use of the International System of Units (SI)
Guide for the Use of the International System of Units (SI) m kg s cd SI mol K A NIST Special Publication 811 2008 Edition Ambler Thompson and Barry N. Taylor NIST Special Publication 811 2008 Edition Guide for the Use of the International System of Units (SI) Ambler Thompson Technology Services and Barry N. Taylor Physics Laboratory National Institute of Standards and Technology Gaithersburg, MD 20899 (Supersedes NIST Special Publication 811, 1995 Edition, April 1995) March 2008 U.S. Department of Commerce Carlos M. Gutierrez, Secretary National Institute of Standards and Technology James M. Turner, Acting Director National Institute of Standards and Technology Special Publication 811, 2008 Edition (Supersedes NIST Special Publication 811, April 1995 Edition) Natl. Inst. Stand. Technol. Spec. Publ. 811, 2008 Ed., 85 pages (March 2008; 2nd printing November 2008) CODEN: NSPUE3 Note on 2nd printing: This 2nd printing dated November 2008 of NIST SP811 corrects a number of minor typographical errors present in the 1st printing dated March 2008. Guide for the Use of the International System of Units (SI) Preface The International System of Units, universally abbreviated SI (from the French Le Système International d’Unités), is the modern metric system of measurement. Long the dominant measurement system used in science, the SI is becoming the dominant measurement system used in international commerce. The Omnibus Trade and Competitiveness Act of August 1988 [Public Law (PL) 100-418] changed the name of the National Bureau of Standards (NBS) to the National Institute of Standards and Technology (NIST) and gave to NIST the added task of helping U.S. -

A Short History of Physics (Pdf)
A Short History of Physics Bernd A. Berg Florida State University PHY 1090 FSU August 28, 2012. References: Most of the following is copied from Wikepedia. Bernd Berg () History Physics FSU August 28, 2012. 1 / 25 Introduction Philosophy and Religion aim at Fundamental Truths. It is my believe that the secured part of this is in Physics. This happend by Trial and Error over more than 2,500 years and became systematic Theory and Observation only in the last 500 years. This talk collects important events of this time period and attaches them to the names of some people. I can only give an inadequate presentation of the complex process of scientific progress. The hope is that the flavor get over. Bernd Berg () History Physics FSU August 28, 2012. 2 / 25 Physics From Acient Greek: \Nature". Broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves. The universe is commonly defined as the totality of everything that exists or is known to exist. In many ways, physics stems from acient greek philosophy and was known as \natural philosophy" until the late 18th century. Bernd Berg () History Physics FSU August 28, 2012. 3 / 25 Ancient Physics: Remarkable people and ideas. Pythagoras (ca. 570{490 BC): a2 + b2 = c2 for rectangular triangle: Leucippus (early 5th century BC) opposed the idea of direct devine intervention in the universe. He and his student Democritus were the first to develop a theory of atomism. Plato (424/424{348/347) is said that to have disliked Democritus so much, that he wished his books burned. -
Newton's First Law of Motion
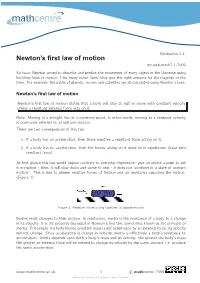
Mechanics 2.1. Newton’s first law of motion mc-web-mech2-1-2009 Sir Isaac Newton aimed to describe and predict the movement of every object in the Universe using his three laws of motion. Like many other ‘laws’ they give the right answers for the majority of the time. For example, the paths of planets, moons and satellites are all calculated using Newton’s laws. Newton’s first law of motion Newton’s first law of motion states that a body will stay at rest or move with constant velocity unless a resultant external force acts on it. Note: Moving in a straight line at a constant speed, in other words, moving at a constant velocity is commonly referred to as uniform motion. There are two consequences of this law: 1. If a body has an acceleration, then there must be a resultant force acting on it. 2. If a body has no acceleration, then the forces acting on it must be in equilibrium (have zero resultant force). At first glance this law would appear contrary to everyday experience: give an object a push to set it in motion - then, it will slow down and come to rest - it does not ‘continue in a state of uniform motion’. This is due to unseen resistive forces of friction and air resistance opposing the motion. (Figure 1). Figure 1: Resistive forces acting together to oppose motion Bodies resist changes to their motion. In mechanics, inertia is the resistance of a body to a change in its velocity. It is the property discussed in Newton’s first law, sometimes known as the principle of inertia. -

Newtonian Mechanics Is Most Straightforward in Its Formulation and Is Based on Newton’S Second Law
CLASSICAL MECHANICS D. A. Garanin September 30, 2015 1 Introduction Mechanics is part of physics studying motion of material bodies or conditions of their equilibrium. The latter is the subject of statics that is important in engineering. General properties of motion of bodies regardless of the source of motion (in particular, the role of constraints) belong to kinematics. Finally, motion caused by forces or interactions is the subject of dynamics, the biggest and most important part of mechanics. Concerning systems studied, mechanics can be divided into mechanics of material points, mechanics of rigid bodies, mechanics of elastic bodies, and mechanics of fluids: hydro- and aerodynamics. At the core of each of these areas of mechanics is the equation of motion, Newton's second law. Mechanics of material points is described by ordinary differential equations (ODE). One can distinguish between mechanics of one or few bodies and mechanics of many-body systems. Mechanics of rigid bodies is also described by ordinary differential equations, including positions and velocities of their centers and the angles defining their orientation. Mechanics of elastic bodies and fluids (that is, mechanics of continuum) is more compli- cated and described by partial differential equation. In many cases mechanics of continuum is coupled to thermodynamics, especially in aerodynamics. The subject of this course are systems described by ODE, including particles and rigid bodies. There are two limitations on classical mechanics. First, speeds of the objects should be much smaller than the speed of light, v c, otherwise it becomes relativistic mechanics. Second, the bodies should have a sufficiently large mass and/or kinetic energy.