Noise and Distortion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Application of Noise Mapping in an Indian Opencast Mine for Effective Noise Management
12th ICBEN Congress on Noise as a Public Health Problem Application of noise mapping in an Indian opencast mine for effective noise management Veena Manwar1, Bibhuti Bhusan Mandal2, Asim Kumar Pal3 1 National Institute of Miners’ Health, Department of Occupational Hygiene, Nagpur, India (corresponding author) 2 National Institute of Miners’ Health, Department of Occupational Hygiene, Nagpur, India 3 Indian Institute of Technology-Indian School of Mines (IIT-ISM), Department of Environmental Science and Engineering, Dhanbad, India Corresponding author's e-mail address: [email protected] ABSTRACT So far as mining industry is concerned, noise pollution is not new. It is generated from operation of equipment and plants for excavation and transport of minerals which affects mine employees as well as population residing in nearby areas. Although in the Recommendations of Tenth Conference on Safety in Mines, noise mapping has been made mandatory in Indian mines still mining industry are not giving proper importance on producing noise maps of mines. Noise mapping is preferred for visualization and its propagation in the form of noise contours so that preventive measures are planned and implemented. The study was conducted in an opencast mine in Central India. Sound sources were identified and noise measurements were carried out according to national and international standards. Considering source locations along with noise levels and other meteorological, geographical factors as inputs, noise maps were generated by Predictor LimA software. Results were evaluated in the light of Central Pollution Control Board norms as to whether noise exposure in the residential and industrial area were within prescribed limits or not. -

Designline PROFILE 42
High Performance Displays FLAT TV SOLUTIONS DesignLine PROFILE 42 Plasma FlatTV 106cm / 42" WWW.CONRAC.DE HIGH PERFORMANCE DISPLAYS FLAT TV SOLUTIONS DesignLine PROFILE 42 (106cm / 42 Zoll Diagonale) Neu: Verarbeitet HD-Signale ! New: HD-Compliant ! Einerseits eine bestechend klare Linienführung. Andererseits Akzente durch die farblich gestalteten Profilleisten in edler Metallic-Lackierung. Das Heimkino-Erlebnis par Excellence. Impressively clear lines teamed with decorative aluminium strips in metallic finish provide coloured highlights. The ultimate home cinema experience. Für höchste Ansprüche: Die FlatTVs der DesignLine kombinieren Hightech mit einzigartiger Optik. Die komplette Elektronik sowie die hochwertigen Breitband-Stereolautsprecher wurden komplett ins Gehäuse integriert. Der im Lieferumfang enthaltene Design-Standfuß aus Glas lässt sich für die Wandmontage einfach und problemlos entfernen, so dass das Display noch platzsparender wie ein Bild an der Wand angebracht werden kann. Die extrem flachen Bildschirme bieten eine unübertroffene Bildbrillanz und -schärfe. Das lüfterlose Konzept basiert auf dem neuesten Stand der Technik: Ohne störende Nebengeräusche hören Sie nur das, was Sie hören möchten. Einfaches Handling per Fernbedienung und mit übersichtlichem On-Screen-Menü. Die Kombination aus Flachdisplay-Technologie, einer High Performance Scaling Engine und einem zukunftsweisenden De-Interlacer* mit speziellen digitalen Algorithmen zur optimalen Darstellung bewegter Bilder bietet Ihnen ein unvergleichliches Fernseherlebnis. Zusätzlich vermittelt die Noise Reduction eine angenehme Bildruhe. For the most decerning tastes: DesignLine flat panel TVs combine advanced technology with outstanding appearance. All the electronics and the high-quality broadband stereo speakers have been fully integrated in the casing. The design glass stand included in the scope of supply can easily be removed for wall assembly, allowing the display to be mounted to the wall like a picture to save even more space. -

Sensory Unpleasantness of High-Frequency Sounds
Acoust. Sci. & Tech. 34, 1 (2013) #2013 The Acoustical Society of Japan PAPER Sensory unpleasantness of high-frequency sounds Kenji Kurakata1;Ã, Tazu Mizunami1 and Kazuma Matsushita2 1National Institute of Advanced Industrial Science and Technology (AIST), AIST Central 6, 1–1–1 Higashi, Tsukuba, 305–8566 Japan 2National Institute of Technology and Evaluation (NITE), 2–49–10, Nishihara, Shibuya-ku, Tokyo, 151–0066 Japan ( Received 5 March 2012, Accepted for publication 2 August 2012 ) Abstract: The sensory unpleasantness of high-frequency sounds of 1 kHz and higher was investigated in psychoacoustic experiments in which young listeners with normal hearing participated. Sensory unpleasantness was defined as a perceptual impression of sounds and was differentiated from annoyance, which implies a subjective relation to the sound source. Listeners evaluated the degree of unpleasantness of high-frequency pure tones and narrow-band noise (NBN) by the magnitude estimation method. Estimates were analyzed in terms of the relationship with sharpness and loudness. Results of analyses revealed that the sensory unpleasantness of pure tones was a different auditory impression from sharpness; the unpleasantness was more level dependent but less frequency dependent than sharpness. Furthermore, the unpleasantness increased at a higher rate than loudness did as the sound pressure level (SPL) became higher. Equal-unpleasantness-level contours, which define the combinations of SPL and frequency of tone having the same degree of unpleasantness, were drawn to display the frequency dependence of unpleasantness more clearly. Unpleasantness of NBN was weaker than that of pure tones, although those sounds were expected to have the same loudness as pure tones. -

10S Johnson-Nyquist Noise Masatsugu Sei Suzuki Department of Physics, SUNY at Binghamton (Date: January 02, 2011)
Chapter 10S Johnson-Nyquist noise Masatsugu Sei Suzuki Department of Physics, SUNY at Binghamton (Date: January 02, 2011) Johnson noise Johnson-Nyquist theorem Boltzmann constant Parseval relation Correlation function Spectral density Wiener-Khinchin (or Khintchine) Flicker noise Shot noise Poisson distribution Brownian motion Fluctuation-dissipation theorem Langevin function ___________________________________________________________________________ John Bertrand "Bert" Johnson (October 2, 1887–November 27, 1970) was a Swedish-born American electrical engineer and physicist. He first explained in detail a fundamental source of random interference with information traveling on wires. In 1928, while at Bell Telephone Laboratories he published the journal paper "Thermal Agitation of Electricity in Conductors". In telecommunication or other systems, thermal noise (or Johnson noise) is the noise generated by thermal agitation of electrons in a conductor. Johnson's papers showed a statistical fluctuation of electric charge occur in all electrical conductors, producing random variation of potential between the conductor ends (such as in vacuum tube amplifiers and thermocouples). Thermal noise power, per hertz, is equal throughout the frequency spectrum. Johnson deduced that thermal noise is intrinsic to all resistors and is not a sign of poor design or manufacture, although resistors may also have excess noise. http://en.wikipedia.org/wiki/John_B._Johnson 1 ____________________________________________________________________________ Harry Nyquist (February 7, 1889 – April 4, 1976) was an important contributor to information theory. http://en.wikipedia.org/wiki/Harry_Nyquist ___________________________________________________________________________ 10S.1 Histrory In 1926, experimental physicist John Johnson working in the physics division at Bell Labs was researching noise in electronic circuits. He discovered random fluctuations in the voltages across electrical resistors, whose power was proportional to temperature. -
![Arxiv:2003.13216V1 [Cs.CV] 30 Mar 2020](https://docslib.b-cdn.net/cover/3269/arxiv-2003-13216v1-cs-cv-30-mar-2020-263269.webp)
Arxiv:2003.13216V1 [Cs.CV] 30 Mar 2020
Learning to Learn Single Domain Generalization Fengchun Qiao Long Zhao Xi Peng University of Delaware Rutgers University University of Delaware [email protected] [email protected] [email protected] Abstract : Source domain(s) <latexit sha1_base64="glUSn7xz2m1yKGYjqzzX12DA3tk=">AAAB8nicjVDLSsNAFL3xWeur6tLNYBFclaQKdllw47KifUAaymQ6aYdOJmHmRiihn+HGhSJu/Rp3/o2TtgsVBQ8MHM65l3vmhKkUBl33w1lZXVvf2Cxtlbd3dvf2KweHHZNkmvE2S2SieyE1XArF2yhQ8l6qOY1Dybvh5Krwu/dcG5GoO5ymPIjpSIlIMIpW8vsxxTGjMr+dDSpVr+bOQf4mVViiNai894cJy2KukElqjO+5KQY51SiY5LNyPzM8pWxCR9y3VNGYmyCfR56RU6sMSZRo+xSSufp1I6exMdM4tJNFRPPTK8TfPD/DqBHkQqUZcsUWh6JMEkxI8X8yFJozlFNLKNPCZiVsTDVlaFsq/6+ETr3mndfqNxfVZmNZRwmO4QTOwINLaMI1tKANDBJ4gCd4dtB5dF6c18XoirPcOYJvcN4+AY5ZkWY=</latexit> <latexit sha1_base64="9X8JvFzvWSXuFK0x/Pe60//G3E4=">AAACD3icbVDLSsNAFJ3UV62vqks3g0Wpm5LW4mtVcOOyUvuANpTJZNIOnUzCzI1YQv/Ajb/ixoUibt26829M2iBqPTBwOOfeO/ceOxBcg2l+GpmFxaXllexqbm19Y3Mrv73T0n6oKGtSX/iqYxPNBJesCRwE6wSKEc8WrG2PLhO/fcuU5r68gXHALI8MJHc5JRBL/fxhzyMwpEREjQnuAbuD6AI3ptOx43uEy6I+muT6+YJZMqfA86SckgJKUe/nP3qOT0OPSaCCaN0tmwFYEVHAqWCTXC/ULCB0RAasG1NJPKataHrPBB/EioNdX8VPAp6qPzsi4mk99uy4Mtle//US8T+vG4J7ZkVcBiEwSWcfuaHA4OMkHOxwxSiIcUwIVTzeFdMhUYRCHOEshPMEJ98nz5NWpVQ+LlWvq4VaJY0ji/bQPiqiMjpFNXSF6qiJKLpHj+gZvRgPxpPxarzNSjNG2rOLfsF4/wJA4Zw6</latexit> S S : Target domain(s) <latexit sha1_base64="ssITTP/Vrn2uchq9aDxvcfruPQc=">AAACD3icbVDLSgNBEJz1bXxFPXoZDEq8hI2Kr5PgxWOEJAaSEHonnWTI7Owy0yuGJX/gxV/x4kERr169+TfuJkF8FTQUVd10d3mhkpZc98OZmp6ZnZtfWMwsLa+srmXXN6o2iIzAighUYGoeWFRSY4UkKayFBsH3FF57/YvUv75BY2WgyzQIselDV8uOFECJ1MruNnygngAVl4e8QXhL8Rkvg+ki8Xbgg9R5uzfMtLI5t+COwP+S4oTk2ASlVva90Q5E5KMmocDaetENqRmDISkUDjONyGIIog9drCdUg4+2GY/+GfKdRGnzTmCS0sRH6veJGHxrB76XdKbX299eKv7n1SPqnDRjqcOIUIvxok6kOAU8DYe3pUFBapAQEEYmt3LRAwOCkgjHIZymOPp6+S+p7heKB4XDq8Pc+f4kjgW2xbZZnhXZMTtnl6zEKkywO/bAntizc+88Oi/O67h1ypnMbLIfcN4+ATKRnDE=</latexit> -

All You Need to Know About SINAD Measurements Using the 2023
applicationapplication notenote All you need to know about SINAD and its measurement using 2023 signal generators The 2023A, 2023B and 2025 can be supplied with an optional SINAD measuring capability. This article explains what SINAD measurements are, when they are used and how the SINAD option on 2023A, 2023B and 2025 performs this important task. www.ifrsys.com SINAD and its measurements using the 2023 What is SINAD? C-MESSAGE filter used in North America SINAD is a parameter which provides a quantitative Psophometric filter specified in ITU-T Recommendation measurement of the quality of an audio signal from a O.41, more commonly known from its original description as a communication device. For the purpose of this article the CCITT filter (also often referred to as a P53 filter) device is a radio receiver. The definition of SINAD is very simple A third type of filter is also sometimes used which is - its the ratio of the total signal power level (wanted Signal + unweighted (i.e. flat) over a broader bandwidth. Noise + Distortion or SND) to unwanted signal power (Noise + The telephony filter responses are tabulated in Figure 2. The Distortion or ND). It follows that the higher the figure the better differences in frequency response result in different SINAD the quality of the audio signal. The ratio is expressed as a values for the same signal. The C-MES signal uses a reference logarithmic value (in dB) from the formulae 10Log (SND/ND). frequency of 1 kHz while the CCITT filter uses a reference of Remember that this a power ratio, not a voltage ratio, so a 800 Hz, which results in the filter having "gain" at 1 kHz. -

47 CFR Ch. I (10–1–06 Edition) § 15.117
§ 15.117 47 CFR Ch. I (10–1–06 Edition) § 15.117 TV broadcast receivers. comprising five pushbuttons and a separate manual tuning knob is considered to provide (a) All TV broadcast receivers repeated access to six channels at discrete shipped in interstate commerce or im- tuning positions. A one-knob (VHF/UHF) ported into the United States, for sale tuning system providing repeated access to or resale to the public, shall comply 11 or more discrete tuning positions is also with the provisions of this section, ex- acceptable, provided each of the tuning posi- cept that paragraphs (f) and (g) of this tions is readily adjustable, without the use section shall not apply to the features of tools, to receive any UHF channel. of such sets that provide for reception (2) Tuning controls and channel read- of digital television signals. The ref- out. UHF tuning controls and channel erence in this section to TV broadcast readout on a given receiver shall be receivers also includes devices, such as comparable in size, location, accessi- TV interface devices and set-top de- bility and legibility to VHF controls vices that are intended to provide and readout on that receiver. audio-video signals to a video monitor, that incorporate the tuner portion of a NOTE: Differences between UHF and VHF TV broadcast receiver and that are channel readout that follow directly from the larger number of UHF television chan- equipped with an antenna or antenna nels available are acceptable if it is clear terminals that can be used for off-the- that a good faith effort to comply with the air reception of TV broadcast signals, provisions of this section has been made. -

Noise Tutorial Part IV ~ Noise Factor
Noise Tutorial Part IV ~ Noise Factor Whitham D. Reeve Anchorage, Alaska USA See last page for document information Noise Tutorial IV ~ Noise Factor Abstract: With the exception of some solar radio bursts, the extraterrestrial emissions received on Earth’s surface are very weak. Noise places a limit on the minimum detection capabilities of a radio telescope and may mask or corrupt these weak emissions. An understanding of noise and its measurement will help observers minimize its effects. This paper is a tutorial and includes six parts. Table of Contents Page Part I ~ Noise Concepts 1-1 Introduction 1-2 Basic noise sources 1-3 Noise amplitude 1-4 References Part II ~ Additional Noise Concepts 2-1 Noise spectrum 2-2 Noise bandwidth 2-3 Noise temperature 2-4 Noise power 2-5 Combinations of noisy resistors 2-6 References Part III ~ Attenuator and Amplifier Noise 3-1 Attenuation effects on noise temperature 3-2 Amplifier noise 3-3 Cascaded amplifiers 3-4 References Part IV ~ Noise Factor 4-1 Noise factor and noise figure 4-1 4-2 Noise factor of cascaded devices 4-7 4-3 References 4-11 Part V ~ Noise Measurements Concepts 5-1 General considerations for noise factor measurements 5-2 Noise factor measurements with the Y-factor method 5-3 References Part VI ~ Noise Measurements with a Spectrum Analyzer 6-1 Noise factor measurements with a spectrum analyzer 6-2 References See last page for document information Noise Tutorial IV ~ Noise Factor Part IV ~ Noise Factor 4-1. Noise factor and noise figure Noise factor and noise figure indicates the noisiness of a radio frequency device by comparing it to a reference noise source. -

Next Topic: NOISE
ECE145A/ECE218A Performance Limitations of Amplifiers 1. Distortion in Nonlinear Systems The upper limit of useful operation is limited by distortion. All analog systems and components of systems (amplifiers and mixers for example) become nonlinear when driven at large signal levels. The nonlinearity distorts the desired signal. This distortion exhibits itself in several ways: 1. Gain compression or expansion (sometimes called AM – AM distortion) 2. Phase distortion (sometimes called AM – PM distortion) 3. Unwanted frequencies (spurious outputs or spurs) in the output spectrum. For a single input, this appears at harmonic frequencies, creating harmonic distortion or HD. With multiple input signals, in-band distortion is created, called intermodulation distortion or IMD. When these spurs interfere with the desired signal, the S/N ratio or SINAD (Signal to noise plus distortion ratio) is degraded. Gain Compression. The nonlinear transfer characteristic of the component shows up in the grossest sense when the gain is no longer constant with input power. That is, if Pout is no longer linearly related to Pin, then the device is clearly nonlinear and distortion can be expected. Pout Pin P1dB, the input power required to compress the gain by 1 dB, is often used as a simple to measure index of gain compression. An amplifier with 1 dB of gain compression will generate severe distortion. Distortion generation in amplifiers can be understood by modeling the amplifier’s transfer characteristic with a simple power series function: 3 VaVaVout=−13 in in Of course, in a real amplifier, there may be terms of all orders present, but this simple cubic nonlinearity is easy to visualize. -
AN279: Estimating Period Jitter from Phase Noise
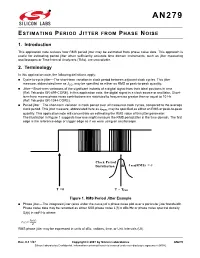
AN279 ESTIMATING PERIOD JITTER FROM PHASE NOISE 1. Introduction This application note reviews how RMS period jitter may be estimated from phase noise data. This approach is useful for estimating period jitter when sufficiently accurate time domain instruments, such as jitter measuring oscilloscopes or Time Interval Analyzers (TIAs), are unavailable. 2. Terminology In this application note, the following definitions apply: Cycle-to-cycle jitter—The short-term variation in clock period between adjacent clock cycles. This jitter measure, abbreviated here as JCC, may be specified as either an RMS or peak-to-peak quantity. Jitter—Short-term variations of the significant instants of a digital signal from their ideal positions in time (Ref: Telcordia GR-499-CORE). In this application note, the digital signal is a clock source or oscillator. Short- term here means phase noise contributions are restricted to frequencies greater than or equal to 10 Hz (Ref: Telcordia GR-1244-CORE). Period jitter—The short-term variation in clock period over all measured clock cycles, compared to the average clock period. This jitter measure, abbreviated here as JPER, may be specified as either an RMS or peak-to-peak quantity. This application note will concentrate on estimating the RMS value of this jitter parameter. The illustration in Figure 1 suggests how one might measure the RMS period jitter in the time domain. The first edge is the reference edge or trigger edge as if we were using an oscilloscope. Clock Period Distribution J PER(RMS) = T = 0 T = TPER Figure 1. RMS Period Jitter Example Phase jitter—The integrated jitter (area under the curve) of a phase noise plot over a particular jitter bandwidth. -

Receiver Sensitivity and Equivalent Noise Bandwidth Receiver Sensitivity and Equivalent Noise Bandwidth
11/08/2016 Receiver Sensitivity and Equivalent Noise Bandwidth Receiver Sensitivity and Equivalent Noise Bandwidth Parent Category: 2014 HFE By Dennis Layne Introduction Receivers often contain narrow bandpass hardware filters as well as narrow lowpass filters implemented in digital signal processing (DSP). The equivalent noise bandwidth (ENBW) is a way to understand the noise floor that is present in these filters. To predict the sensitivity of a receiver design it is critical to understand noise including ENBW. This paper will cover each of the building block characteristics used to calculate receiver sensitivity and then put them together to make the calculation. Receiver Sensitivity Receiver sensitivity is a measure of the ability of a receiver to demodulate and get information from a weak signal. We quantify sensitivity as the lowest signal power level from which we can get useful information. In an Analog FM system the standard figure of merit for usable information is SINAD, a ratio of demodulated audio signal to noise. In digital systems receive signal quality is measured by calculating the ratio of bits received that are wrong to the total number of bits received. This is called Bit Error Rate (BER). Most Land Mobile radio systems use one of these figures of merit to quantify sensitivity. To measure sensitivity, we apply a desired signal and reduce the signal power until the quality threshold is met. SINAD SINAD is a term used for the Signal to Noise and Distortion ratio and is a type of audio signal to noise ratio. In an analog FM system, demodulated audio signal to noise ratio is an indication of RF signal quality. -

Signal-To-Noise Ratio and Dynamic Range Definitions
Signal-to-noise ratio and dynamic range definitions The Signal-to-Noise Ratio (SNR) and Dynamic Range (DR) are two common parameters used to specify the electrical performance of a spectrometer. This technical note will describe how they are defined and how to measure and calculate them. Figure 1: Definitions of SNR and SR. The signal out of the spectrometer is a digital signal between 0 and 2N-1, where N is the number of bits in the Analogue-to-Digital (A/D) converter on the electronics. Typical numbers for N range from 10 to 16 leading to maximum signal level between 1,023 and 65,535 counts. The Noise is the stochastic variation of the signal around a mean value. In Figure 1 we have shown a spectrum with a single peak in wavelength and time. As indicated on the figure the peak signal level will fluctuate a small amount around the mean value due to the noise of the electronics. Noise is measured by the Root-Mean-Squared (RMS) value of the fluctuations over time. The SNR is defined as the average over time of the peak signal divided by the RMS noise of the peak signal over the same time. In order to get an accurate result for the SNR it is generally required to measure over 25 -50 time samples of the spectrum. It is very important that your input to the spectrometer is constant during SNR measurements. Otherwise, you will be measuring other things like drift of you lamp power or time dependent signal levels from your sample.