Case of Lebanon
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Syria Refugee Response ±
S Y R I A R E F U G E E R E S P O N S E LEBANON Beirut and Mount Lebanon Governorates Distribution of the Registered Syrian Refugees at the Cadastral Level As of 30 November 2015 Fghal Distribution of the Registered Syrian Kfar Kidde Berbara Jbayl Chmout 24 Maad Refugees by Province 26 Bekhaaz Aain Kfaa Mayfouq Bejje 12 Mounsef Gharzouz 22 Qottara Jbayl BEIRUT 7 2 Kharbet Jbayl 16 Tartij Chikhane GhalbounChamate 23 9 Rihanet Jbayl 16 Total No. of Household Registered Hsarat Haqel Lehfed 8,760 12 Hasrayel Aabaydat Beit Habbaq 22 Jeoddayel Jbayl 69 Hbaline 33 Jaj 47 Kfoun Saqiet El-Khayt Ghofrine 31 kafr Total No. of Individuals Registered 28,706 20 11 Behdaydat 6 Habil Saqi Richmaya Aarab El-Lahib Kfar Mashoun 19 Aamchit 31 Birket Hjoula Hema Er-Rehban 978 Bintaael Michmich Jbayl Edde Jbayl 33 63 7 Hema Mar Maroun AannayaLaqlouq MOUNT LEBANON Bichtlida Hboub Ehmej 19 8 Jbayl 57 Hjoula 69 Total No. of Household Registered 1,737 Bmehrayn Brayj Jbayl 74,356 Ras Osta Jbeil Aaqoura 10 Kfar Baal Mazraat El-Maaden Mazraat Es Siyad Qartaboun Jlisse 53 44 Blat Jbeil 144 9 25 Sebrine Aalmat Ech-Chamliye Total No. of Individuals Registered 548 Tourzaiya Mghayre Jbeil 283,552 Mastita 24 Bchille Jbayl Jouret El-Qattine 8 Tadmor 6 211 47 Ferhet Aalmat Ej-Jnoubiye Yanouh Jbayl Zibdine Jbayl Bayzoun 5 Hsoun Souanet Jbayl Qartaba Mar Sarkis 17 40 4 2 3 Boulhos Hdeine Halate Aalita 266 Fatre Frat 940 1 Aain Jrain Aain El-GhouaybeSeraaiita Majdel El-Aqoura Adonis Jbayl Mchane Bizhel 7 Janne 8 Ghabat Aarasta 112 42 4 19 Qorqraiya 11 Kharayeb Nahr Ibrahim -

Cretaceous Transition in Mount Lebanon
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by I-Revues Carnets Geol. 16 (8) Some steps toward a new story for the Jurassic - Cretaceous transition in Mount Lebanon Bruno GRANIER 1 Christopher TOLAND 2 Raymond GÈZE 3 Dany AZAR 3, 4 Sibelle MAKSOUD 3 Abstract: The stratigraphic framework of the Upper Jurassic and Lower Cretaceous strata of Lebanon that dates back to DUBERTRET's publications required either consolidation or full revision. The preliminary results of our investigations in the Mount Lebanon region are presented here. We provide new micro- paleontological and sedimentological information on the Salima Oolitic Limestones, which is probably an unconformity-bounded unit (possibly Early Valanginian in age), and the "Grès du Liban" (Barremian in age). Our revised bio- and holostratigraphic interpretations and the new age assignations lead us to em- phasize the importance of the two hiatuses in the sedimentary record below and above the Salima, i.e., at the transition from the Jurassic to the Cretaceous. Key Words: Tithonian; Valanginian; Barremian; hiatus; unconformity; Salima Oolitic Limestones; "Grès du Liban"; amber; Balkhania. Citation: GRANIER B., TOLAND C., GÈZE R., AZAR D. & MAKSOUD S. (2016).- Some steps toward a new story for the Jurassic - Cretaceous transition in Mount Lebanon.- Carnets Geol., Madrid, vol. 16, no. 8, p. 247- 269. Résumé : Avancées dans une réécriture de l'histoire de la transition du Jurassique au Crétacé dans le Mont Liban.- Le canevas stratigraphique du Jurassique supérieur et du Crétacé inférieur du Liban date des publications anciennes de DUBERTRET et aurait donc besoin d'être soit toiletté et consolidé, soit révisé de fond en comble. -

Lebanon National Operations Room Daily Report on COVID-19
Lebanon National Operations Room Daily Report on COVID-19 Wednesday, December 16, 2020 Report #273 Time Published: 08:00 PM New in the report: Recommendations issued by the meeting of the Committee for Follow-up of Preventive Measures and Measures to Confront the Coronavirus on 12/16/2020 Occupancy rate of COVID-19 Beds and Availability For daily information on all the details of the beds distribution availablity for Covid-19 patients among all governorates and according to hospitals, kindly check the dashboard link: Computer :https:/bit.ly/DRM-HospitalsOccupancy-PCPhone:https:/bit.ly/DRM-HospitalsOccupancy-Mobile All reports and related decisions can be found at: http://drm.pcm.gov.lb Or social media @DRM_Lebanon Distribution of Cases by Villages Beirut 160 Baabda 263 Maten 264 Chouf 111 Kesrwen 112 Aley 121 AIN MRAISSEH 6 CHIYAH 9 BORJ HAMMOUD 13 DAMOUR 1 JOUNIEH SARBA 6 AMROUSIYE 2 AUB 1 JNAH 2 SINN FIL 9 SAADIYAT 2 JOUNIEH KASLIK 5 HAY ES SELLOM 9 RAS BEYROUTH 5 OUZAAI 2 JDAIDET MATN 12 CHHIM 12 ZOUK MKAYEL 14 KHALDEH 2 MANARA 2 BIR HASSAN 1 BAOUCHRIYEH 12 KETERMAYA 4 NAHR EL KALB 1 CHOUIFAT OMARA 15 QREITEM 3 MADINE RIYADIYE 1 DAOURA 7 AANOUT 2 JOUNIEH GHADIR 4 DEIR QOUBEL 2 RAOUCHEH 5 GHBAYREH 9 RAOUDA 8 SIBLINE 1 ZOUK MOSBEH 16 AARAMOUN 17 HAMRA 8 AIN ROUMANE 11 SAD BAOUCHRIYE 1 BOURJEIN 4 ADONIS 3 BAAOUERTA 1 AIN TINEH 2 FURN CHEBBAK 3 SABTIYEH 7 BARJA 14 HARET SAKHR 8 BCHAMOUN 10 MSAITBEH 6 HARET HREIK 54 DEKOUANEH 13 BAASSIR 6 SAHEL AALMA 4 AIN AANOUB 1 OUATA MSAITBEH 1 LAYLAKEH 5 ANTELIAS 16 JIYEH 3 ADMA W DAFNEH 2 BLAYBEL -

Editor-In-Chief Georges Mghames English Editor Kenneth Mortimer
ndu Issue 54 March 2012 March 2012 How beautiful is the snow! How Hail the snow, covering the mountains, draping the generous is the snow! A true blessing slopes, concealing rooftops, and clothing snow-laden from the heavens above! And trees with its immaculate coat. countless are the blessings that fall Hail this majestic beauty, swirling down in the fog and upon us from the sky! However, we in the moonlight; and when dawn breaks, snowflakes ignore, shun, and abandon them! become like flocks of white doves. Hasn’t God bestowed a great blessing Hail the snow, laying down a soft and yielding carpet and upon Lebanon? Isn’t this country a bringing back childhood memories. Hail the icy crystals real boon sent to us, and only us, by that lie like a beautiful woman. heaven? Still, we scorn its natural Hail the snow in all its states and shapes. When it melts, wonders, heritage, and future. it filters into the earth and rocks, and streams become And if we cast blame on the “others”, rivers. a verse written by Abul Tayyeb al- Hail the snow, a pleasure for the eyes to behold and a Mutanabi, the renowned Arab poet, delight for the spirit. Snow triggers our imagination to warns us: picture fields in bloom and spring in feast. Snow preludes “Whenever a branch grows, Man caressing breezes into softer tomorrows. transforms it into a spear shaft and Hail the snow, nostalgia of innocence, purity, and affixes it with a spearhead.” clarity… of conscience, goodwill, and good repute… and We are this “Man”, what a disgrace! generosity. -

The War of Famine: Everyday Life in Wartime Beirut and Mount Lebanon (1914-1918)
The War of Famine: Everyday Life in Wartime Beirut and Mount Lebanon (1914-1918) by Melanie Tanielian A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in History in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Beshara Doumani Professor Saba Mahmood Professor Margaret L. Anderson Professor Keith D. Watenpaugh Fall 2012 The War of Famine: Everyday Life in Wartime Beirut and Mount Lebanon (1914-1918) © Copyright 2012, Melanie Tanielian All Rights Reserved Abstract The War of Famine: Everyday Life in Wartime Beirut and Mount Lebanon (1914-1918) By Melanie Tanielian History University of California, Berkeley Professor Beshara Doumani, Chair World War I, no doubt, was a pivotal event in the history of the Middle East, as it marked the transition from empires to nation states. Taking Beirut and Mount Lebanon as a case study, the dissertation focuses on the experience of Ottoman civilians on the homefront and exposes the paradoxes of the Great War, in its totalizing and transformative nature. Focusing on the causes and symptoms of what locals have coined the ‘war of famine’ as well as on international and local relief efforts, the dissertation demonstrates how wartime privations fragmented the citizenry, turning neighbor against neighbor and brother against brother, and at the same time enabled social and administrative changes that resulted in the consolidation and strengthening of bureaucratic hierarchies and patron-client relationships. This dissertation is a detailed analysis of socio-economic challenges that the war posed for Ottoman subjects, focusing primarily on the distorting effects of food shortages, disease, wartime requisitioning, confiscations and conscriptions on everyday life as well as on the efforts of the local municipality and civil society organizations to provision and care for civilians. -

Syria Refugee Response ±
S Y R I A R E F U G E E R E S P O N S E LEBANON Beirut and Mount Lebanon Governorates Distribution of the Registered Syrian Refugees at the Cadastral Level As of 31 January 2016 Fghal Distribution of the Registered Syrian Kfar Kidde Berbara Jbayl Chmout 24 Maad Refugees by Province 20 Bekhaaz Aain Kfaa Mayfouq Bejje 9 Mounsef Gharzouz 27 Qottara Jbayl BEIRUT 7 2 Kharbet Jbayl 16 Tartij Chikhane GhalbounChamate 29 9 Rihanet Jbayl 17 Total No. of Household Registered Hsarat Haqel Lehfed 8,680 12 Hasrayel Aabaydat Beit Habbaq 22 Jeoddayel Jbayl 77 Hbaline 33 Jaj 38 Kfoun Saqiet El-Khayt Ghofrine 31 kafr Total No. of Individuals Registered 28,523 24 11 Behdaydat 6 Habil Saqi Richmaya Aarab El-Lahib Kfar Mashoun 19 Aamchit 27 Birket Hjoula Hema Er-Rehban 962 Bintaael Michmich Jbayl Edde Jbayl 33 63 7 Hema Mar Maroun AannayaLaqlouq MOUNT LEBANON Bichtlida Hboub Ehmej 19 8 Hjoula 57 69 Jbayl 3 Total No. of Household Registered 1,764 Bmehrayn Brayj Jbayl 74,267 Ras Osta Jbeil Aaqoura 10 Kfar Baal Mazraat El-Maaden Mazraat Es Siyad Qartaboun Jlisse 53 43 Blat Jbeil 140 9 19 Sebrine Aalmat Ech-Chamliye Total No. of Individuals Registered 531 Tourzaiya Mghayre Jbeil 283,433 Mastita 24 Tadmor Bchille Jbayl Jouret El-Qattine 8 16 190 47 1 Ferhet Aalmat Ej-Jnoubiye Yanouh Jbayl Zibdine Jbayl Bayzoun 5 Hsoun Souanet Jbayl Qartaba Mar Sarkis 17 33 4 2 3 Boulhos Hdeine Halate Aalita 272 Fatre Frat 933 1 Aain Jrain Aain El-GhouaybeSeraaiita Majdel El-Aqoura Adonis Jbayl Mchane Bizhel 7 Janne 8 Ghabat Aarasta 112 42 6 18 Qorqraiya 11 Kharayeb Nahr Ibrahim -
Lebanon National Operations Room Daily Report on COVID-19
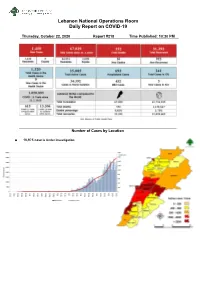
Lebanon National Operations Room Daily Report on COVID-19 Thursday, October 22, 2020 Report #218 Time Published: 10:30 PM Number of Cases by Location • 10,975 case is Under investigation Beirut 60 Chouf 43 Kesrwen 98 Matn 151 Ashrafieh 9 Anout 1 Ashkout 1 Ein Alaq 1 Ein Al Mreisseh 1 Barja 6 Ajaltoun 2 Ein Aar 1 Basta Al Fawka 1 Barouk 1 Oqaybeh 1 Antelias 3 Borj Abi Haidar 2 Baqaata 1 Aramoun 1 Baabdat 3 Hamra 1 Chhim 6 Adra & Ether 1 Bouchrieh 1 Mar Elias 3 Damour 1 Adma 1 Beit Shabab 2 Mazraa 3 Jiyyeh 2 Adonis 3 Beit Mery 1 Mseitbeh 2 Ketermaya 2 Aintoura 1 Bekfaya 2 Raouche 1 Naameh 5 Ballouneh 3 Borj Hammoud 9 Ras Beirut 1 Niha 3 Fatqa 1 Bqennaya 1 Sanayeh 2 Wady Al Zayne 1 Bouar 2 Broummana 2 Tallet El Drouz 1 Werdanieh 1 Ghazir 3 Bsalim 1 Tallet Al Khayat 1 Rmeileh 1 Ghbaleh 1 Bteghrine 1 Tariq Jdeedeh 4 Saadiyat 1 Ghodras 2 Byaqout 1 Zarif 1 Sibline 1 Ghosta 3 Dbayyeh 3 Others 27 Zaarourieh 1 Hrajel 1 Dekwene 12 Baabda 101 Others 9 Ghadir 2 Dhour Shweir 1 Ein El Rimmaneh 8 Hasbaya 6 Haret Sakher 6 Deek Al Mahdy 2 Baabda 4 Hasbaya 1 Kaslik 3 Fanar 4 Bir Hassan 1 Others 5 Sahel Alma 7 Horch Tabet 1 Borj Al Brajneh 17 Byblos 25 Sarba 5 Jal El Dib 3 Botchay 1 Blat 1 Kfardebian 1 Jdeidet El Metn 2 Chiah 6 Halat 1 Kfarhbab 1 Mansourieh 2 Forn Al Shebbak 3 Jeddayel 1 Kfour 3 Aoukar 3 Ghobeiry 3 Monsef 1 Qlei'aat 1 Mazraet Yashouh 3 Hadat 12 Ras Osta 1 Raasheen 2 Monteverde 2 Haret Hreik 5 Others 20 Safra 2 Mteileb 3 Hazmieh 4 Jezzine 12 Sehaileh 1 Nabay 1 Loueizy 1 Baysour 1 Tabarja 6 Naqqash 3 Jnah 2 Ein Majdoleen 1 Zouk Michael 1 Qanbt -

Republic of Lebanon Public Disclosure Authorized Policy Note on Irrigation Sector Sustainability
Report No. 28766 - LE Republic Of Lebanon Public Disclosure Authorized Policy Note on Irrigation Sector Sustainability November 2003 The World Bank Public Disclosure Authorized Water, Environment, Social, and Rural Development Group Middle East and North Africa Region and Agriculture and Rural Development Department Public Disclosure Authorized Public Disclosure Authorized Contents Preface ........................................................................................................................................... vii Acronyms and Abbreviations ........................................................................................................ viii Executive Summary ........................................................................................................................ ix 1. Introduction............................................................................................................................. 1 2. Water Resources....................................................................................................................... 2 WATER DEMAND ............................................................................................................................6 For Irrigation Water................................................................................................................... 6 For Domestic and Industrial Use................................................................................................. 7 3. The Agriculture Sector.......................................................................................................... -
Hazards to Groundwater & Assessment of Pollution Risks In
REPUBLIC OF LEBANON FEDERAL REPUBLIC OF GERMANY Council for Development and Federal Institute for Geosciences Reconstruction and Natural Resources CDR BGR Beirut Hannover TECHNICAL COOPERATION PROJECT NO.: 2008.2162.9 Protection of Jeita Spring SPECIAL REPORT NO. 16 Hazards to Groundwater and Assessment of Pollution Risk in the Jeita Spring Catchment Raifoun May 2013 German-Lebanese Technical Cooperation Project Protection of Jeita Spring Special Report No. 16: Hazards to Groundwater and Assessment of Pollution Risk in the Jeita Spring Catchment Hazards to Groundwater and Assessment of Pollution Risk in the Jeita Spring Catchment Author: Eng. Renata Raad, Dr. Armin Margane (both BGR) Commissioned by: Federal Ministry for Economic Cooperation and Development (Bundesministerium für wirtschaftliche Zusammenarbeit und Entwicklung, BMZ) Project: Protection of Jeita Spring BMZ-No.: 2008.2162.9 BGR-Archive No.: xxxxxxx Date of issuance: May 2013 No. of pages: 209 page II German-Lebanese Technical Cooperation Project Protection of Jeita Spring Special Report No. 16: Hazards to Groundwater and Assessment of Pollution Risk in the Jeita Spring Catchment Table of Contents 0 EXECUTIVE SUMMARY ......................................................................................... 1 1 INTRODUCTION...................................................................................................... 3 2 SCOPE OF WORK .................................................................................................. 4 3 STUDY AREA ......................................................................................................... -

Syria Refugee Response
WASH Sector Working Group SYRIA REFUGEE RESPONSE GIS and Mapping by UNHCR and UNICEF For more information and updates contact Bekaa William Lavell [email protected] WASH Sector Working Group Date: 5/5/2014 *#*#*# *# Implementation of WASH Activities *#*# *# *#*#*# # Aandqet Mazareaa Mhammaret*#*# *##*#*# * Deir Zouq El Jebrayel Aakkar Qbaiyat *# *#*# *# Ouadi El- *# Tikrit Bezbina Jabal Akroum *# *#*#* *#*# *# Dalloum Hosniyé El-Aatiqa Aakkar *#*#*#*#*#*#*#*#B*#ebnine Jamous Rahbé *# *#*# *#*#*# Houaich *# Z*#ou*#q*# *#*# Mazareaa Trablous *#*# *#*# *#*# Qardaf *# Jabal *#Bhann*#ine Et-Tell *# *# *#*# Akroum Trablous Minie *##*# berqayel *# *#*#*#*#*#*# Raouda- El-Haddadine, Trablous *#*#*#*# *#*#*#*# *##**#*#*# *#**#*# Aadoua *# El-Hadid, El-Mharta Ez-Zahrieh *#**# *# *#*# *# Nabi *# Me*#rkebta Fnaydeq Deir *# Youcheaa *# Hrar Mina N:3 Trablous Beddaoui Aammar *#*#*# Qabaait jardins Hermel Mina Trablous et Trablous Michmich Jardin TaEblb-Qanoebhbe *# *# "Trablous Aakkar Es-Souayqa *# *# Tripoli Me*#jdlaiya*# Aalma *# Kfar Chellane Zgharta M*#ir*#iata Arde *# *# Aachach Kfar Bakhaaoun Ras Trablous Habou Masqa Ez-Zeitoun Rachaaine *#*# Zgharta Kfardlaqous Barsa Bkeftine Qarah Aassoun Sir Ed- Qalamoun *# Izal Deddé Bach Deir Danniyé *# Kfarzaina Nbouh Nakhlé Khaldiyé *#*# Deir Btouratij Kfarchakhna Jdeide *#*# Kfar Enfé Kahel Bchannine Morh *#*# Barghoun Aaba Kfarsghab *# Aarjis *# Bterram Bsarma Qaa Baa*#lb*#ek Chikka *# Qaa *# Bechmizzine RasKfarfou Bqaa *# Kfar Baayoun *# Kifa *# Sefrine Heri Kfar Aaqqa Kousba Hazir Karm Ras Baalbek -

Monitoring the Snowpack Volume in a Sinkhole on Mount Lebanon Using Time Lapse Photogrammetry
sensors Article Monitoring the Snowpack Volume in a Sinkhole on Mount Lebanon using Time Lapse Photogrammetry Charbel Abou Chakra 1,2,3,*, Simon Gascoin 4,* , Janine Somma 1, Pascal Fanise 4 and Laurent Drapeau 4 1 Laboratoire de Télédétection, Centre de Recherche en Environnement-Espace Méditerranée Orientale, Université Saint-Joseph, Beirut BP 17-5208, Lebanon 2 Arab Union of Surveyors, Beirut BP 9300, Lebanon 3 Faculty of Engineering, Université Libano-Canadienne, Aintoura BP 32, Lebanon 4 Centre d’Etudes Spatiales de la Biosphère (CESBIO), Université de Toulouse, CNES/CNRS/INRA/IRD/UPS, 31401 Toulouse, France * Correspondence: [email protected] (C.A.C.); [email protected] (S.G.); Tel.: +961-7090-7922 (C.A.C.) Received: 15 July 2019; Accepted: 6 September 2019; Published: 9 September 2019 Abstract: Lebanon has experienced serious water scarcity issues recently, despite being one of the wealthiest countries in the Middle East for water resources. A large fraction of the water resources originates from the melting of the seasonal snow on Mount Lebanon. Therefore, continuous and systematic monitoring of the Lebanese snowpack is becoming crucial. The top of Mount Lebanon is punctuated by karstic hollows named sinkholes, which play a key role in the hydrological regime as natural snow reservoirs. However, monitoring these natural snow reservoirs remains challenging using traditional in situ and remote sensing techniques. Here, we present a new system in monitoring the evolution of the snowpack volume in a pilot sinkhole located in Mount Lebanon. The system uses three compact time-lapse cameras and photogrammetric software to reconstruct the elevation of the snow surface within the sinkhole. -

Syria Refugee Response ±
S Y R I A R E F U G E E R E S P O N S E LEBANON Beirut and Mount Lebanon Governorates Distribution of the Registered Syrian Refugees at the Cadastral Level As of 30 September 2015 Fghal Distribution of the Registered Syrian Kfar Kidde Berbara Jbayl Chmout 24 Maad Refugees by Province 21 Bekhaaz Aain Kfaa Mayfouq Bejje 12 Mounsef Gharzouz 22 Qottara Jbayl BEIRUT 7 2 Kharbet Jbayl 15 Tartij Chikhane GhalbounChamate 30 9 Rihanet Jbayl Hsarat 7 Total No. of Household Registered Haqel Lehfed 8,954 12 Hasrayel 6 Aabaydat Beit Habbaq 26 Jeoddayel Jbayl 67 Hbaline 29 Jaj 47 Kfoun Saqiet El-Khayt Ghofrine 31 kafr Total No. of Individuals Registered 29,264 20 11 Behdaydat 6 Habil Saqi Richmaya Aarab El-Lahib Kfar Mashoun 19 Aamchit 30 Birket Hjoula Hema Er-Rehban 962 Bintaael Michmich Jbayl Edde Jbayl 33 53 7 Hema Mar Maroun AannayaLaqlouq MOUNT LEBANON Bichtlida Hboub Ehmej 21 8 Jbayl 58 Hjoula 70 Total No. of Household Registered 1,752 Bmehrayn Brayj Jbayl 75,867 Ras Osta Jbeil Aaqoura 10 Kfar Baal Mazraat El-Maaden Mazraat Es Siyad Qartaboun Jlisse 54 44 Blat Jbeil 143 9 27 Sebrine Aalmat Ech-Chamliye Total No. of Individuals Registered 574 Tourzaiya Mghayre Jbeil 287,752 Mastita 19 Bchille Jbayl Jouret El-Qattine 8 Tadmor 6 211 47 Ferhet Aalmat Ej-Jnoubiye Yanouh Jbayl Zibdine Jbayl Bayzoun 4 Hsoun Souanet Jbayl Qartaba Mar Sarkis 17 39 8 2 3 Boulhos Hdeine Halate Aalita 256 Fatre Frat 953 2 Aain Jrain Aain El-GhouaybeSeraaiita Majdel El-Aqoura Adonis Jbayl Mchane Bizhel 7 Janne 7 Ghabat Aarasta 129 43 4 19 Qorqraiya 11 Kharayeb Nahr Ibrahim