AUTOMATED ITERATIVE GAME DESIGN a Dissertation Presented
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Designing Multivocal Museums Designing Multivocal Museums Intercultural Practices at Museo Designing Diocesano, Milano
Books designing multivocal museums designing multivocal museums intercultural practices at museo designing diocesano, milano This book presents the process of designing multivocal of a museum experience, included in MeLa Project’s research, and accomplished at the Museo Diocesano di Milano. museums The museum experience put together many relevant issues for the renewal of museum Intercultural Practices at Museo interpretation, using a design discourse to Diocesano, Milano explore the combination of technological tools and multi-vocal content to enable diverse dynamics of cultural representation. edited by The volume maps the entire process of a Rita Capurro and Eleonora Lupo cross-disciplinary research to develop possible scenarios that can be translated not only as test verification of the theoretical investigations but Lupo edited by Rita Capurro and Eleonora also into the production of various experimental exhibition designs. With contributions by: Rita Capurro, Sara Chie- sa, Luca Greci, Eleonora Lupo, Ece Özdil, Davide Spallazzo, Raffaella Trocchianesi. editors Rita Capurro, Art Historian, Ph.D., Inde- pendent Researcher Eleonora Lupo, Ph.D., Associate Professor at School of Design, Politecnico di Milano. cover image — Test with users at Museo Diocesano, Milan, Raffaella Trocchianesi, 2014. Books MeLa–European Museums in an age of migrations 12 isbn978-88-941674-0-5 Designing Multivocal Museums: Intercultural Practices at Museo Diocesano, Milano Books Designing Multivocal Museums Intercultural Practices at Museo Diocesano, Milano edited by Rita Capurro and Eleonora Lupo Books 4 — designing multivocal museums: intercultural practices at museo diocesano, milano mela book 12 – designing multivocal museums intercultural practices at museo diocesano, milano. Published by Politecnico di Milano, Department of Design © January 2016, The Authors This work is provided on line as open access document under the terms of Creative Com- mons Attribution-NonCommercial-NoDerivatives 4.0 International. -

Openbsd Gaming Resource
OPENBSD GAMING RESOURCE A continually updated resource for playing video games on OpenBSD. Mr. Satterly Updated August 7, 2021 P11U17A3B8 III Title: OpenBSD Gaming Resource Author: Mr. Satterly Publisher: Mr. Satterly Date: Updated August 7, 2021 Copyright: Creative Commons Zero 1.0 Universal Email: [email protected] Website: https://MrSatterly.com/ Contents 1 Introduction1 2 Ways to play the games2 2.1 Base system........................ 2 2.2 Ports/Editors........................ 3 2.3 Ports/Emulators...................... 3 Arcade emulation..................... 4 Computer emulation................... 4 Game console emulation................. 4 Operating system emulation .............. 7 2.4 Ports/Games........................ 8 Game engines....................... 8 Interactive fiction..................... 9 2.5 Ports/Math......................... 10 2.6 Ports/Net.......................... 10 2.7 Ports/Shells ........................ 12 2.8 Ports/WWW ........................ 12 3 Notable games 14 3.1 Free games ........................ 14 A-I.............................. 14 J-R.............................. 22 S-Z.............................. 26 3.2 Non-free games...................... 31 4 Getting the games 33 4.1 Games............................ 33 5 Former ways to play games 37 6 What next? 38 Appendices 39 A Clones, models, and variants 39 Index 51 IV 1 Introduction I use this document to help organize my thoughts, files, and links on how to play games on OpenBSD. It helps me to remember what I have gone through while finding new games. The biggest reason to read or at least skim this document is because how can you search for something you do not know exists? I will show you ways to play games, what free and non-free games are available, and give links to help you get started on downloading them. -

Card Game Maker: a Card Game Creation System for Unity
SBC - Proceedings of the SBGames 2014 | ISSN: 2179-2259 Card Game Maker: A card game creation system for Unity Rainer M. Vieira¹ João R. Bittencourt² Universidade do Vale do Rio dos Sinos, Brazil Abstract existing generic game engine and adapt it to run card games employing the specifications of the creation The current article reports the development process system. This engine, being a layer below the CGM, of a card game creation system bundled with an was named Card Game Maker Engine (CGME). engine to execute these games. To find out the project requirements, case studies of modern card This article is organized into six Sections: in games were used as guidelines to define common Section 1 the motivation for creating the CGM was components in card games that can be used to the presented; In Section 2 a brief review of related work development of said system. With the data acquired will be done; in Section 3 the results of case studies on these studies, a two-layered architecture model that demonstrate the common elements in classic and had been defined, demonstrated by a class diagram. modern card games will be reported; In Section 4 the With the architecture proposed, a study to define the CGME layer proposed model will be presented; In technology requirements to the project had been Section 5 the technological decisions for the made, defining the system as a Unity extension implementation of the presented model will be developed in C#. When the Card Game Maker presented; and finally, in Section 6 the concluding creational process is concluded, a complete game remarks will be made, also reporting future work. -
A Recommended Workflow Methodology in the Creation of An
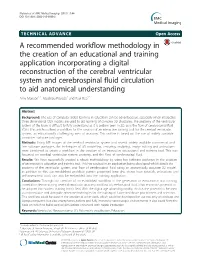
Manson et al. BMC Medical Imaging (2015) 15:44 DOI 10.1186/s12880-015-0088-6 TECHNICAL ADVANCE Open Access A recommended workflow methodology in the creation of an educational and training application incorporating a digital reconstruction of the cerebral ventricular system and cerebrospinal fluid circulation to aid anatomical understanding Amy Manson1,2, Matthieu Poyade2 and Paul Rea1* Abstract Background: The use of computer-aided learning in education can be advantageous, especially when interactive three-dimensional (3D) models are used to aid learning of complex 3D structures. The anatomy of the ventricular system of the brain is difficult to fully understand as it is seldom seen in 3D, as is the flow of cerebrospinal fluid (CSF). This article outlines a workflow for the creation of an interactive training tool for the cerebral ventricular system, an educationally challenging area of anatomy. This outline is based on the use of widely available computer software packages. Methods: Using MR images of the cerebral ventricular system and several widely available commercial and free software packages, the techniques of 3D modelling, texturing, sculpting, image editing and animations were combined to create a workflow in the creation of an interactive educational and training tool. This was focussed on cerebral ventricular system anatomy, and the flow of cerebrospinal fluid. Results: We have successfully created a robust methodology by using key software packages in the creation of an interactive education and training tool. This has resulted in an application being developed which details the anatomy of the ventricular system, and flow of cerebrospinal fluid using an anatomically accurate 3D model. -
A Survey Full Text Available At
Full text available at: http://dx.doi.org/10.1561/0600000083 Publishing and Consuming 3D Content on the Web: A Survey Full text available at: http://dx.doi.org/10.1561/0600000083 Other titles in Foundations and Trends R in Computer Graphics and Vision Crowdsourcing in Computer Vision Adriana Kovashka, Olga Russakovsky, Li Fei-Fei and Kristen Grauman ISBN: 978-1-68083-212-9 The Path to Path-Traced Movies Per H. Christensen and Wojciech Jarosz ISBN: 978-1-68083-210-5 (Hyper)-Graphs Inference through Convex Relaxations and Move Making Algorithms Nikos Komodakis, M. Pawan Kumar and Nikos Paragios ISBN: 978-1-68083-138-2 A Survey of Photometric Stereo Techniques Jens Ackermann and Michael Goesele ISBN: 978-1-68083-078-1 Multi-View Stereo: A Tutorial Yasutaka Furukawa and Carlos Hernandez ISBN: 978-1-60198-836-2 Full text available at: http://dx.doi.org/10.1561/0600000083 Publishing and Consuming 3D Content on the Web: A Survey Marco Potenziani Visual Computing Lab, ISTI CNR [email protected] Marco Callieri Visual Computing Lab, ISTI CNR [email protected] Matteo Dellepiane Visual Computing Lab, ISTI CNR [email protected] Roberto Scopigno Visual Computing Lab, ISTI CNR [email protected] Boston — Delft Full text available at: http://dx.doi.org/10.1561/0600000083 Foundations and Trends R in Computer Graphics and Vision Published, sold and distributed by: now Publishers Inc. PO Box 1024 Hanover, MA 02339 United States Tel. +1-781-985-4510 www.nowpublishers.com [email protected] Outside North America: now Publishers Inc. -

Mapping Game Engines for Visualisation
Mapping Game Engines for Visualisation An initial study by David Birch- [email protected] Contents Motivation & Goals: .......................................................................................................................... 2 Assessment Criteria .......................................................................................................................... 2 Methodology .................................................................................................................................... 3 Mapping Application ......................................................................................................................... 3 Data format ................................................................................................................................... 3 Classes of Game Engines ................................................................................................................... 4 Game Engines ................................................................................................................................... 5 Axes of Evaluation ......................................................................................................................... 5 3d Game Studio ....................................................................................................................................... 6 3DVIA Virtools ........................................................................................................................................ -
S Q X W W X А V А
RETRO7 Cover UK 09/08/2004 12:20 PM Page 1 ❙❋❙P✄❍❇N❋❙ ❉PNNP❊P❙❋•❚❋❍❇•❖❏❖❋❖❊P•❇❇❙❏•❚❏❖❉M❇❏❙•❇❉P❙❖•& NP❙❋ * ❏❚❚❋✄❚❋❋❖ * ❙❋❙P✄❍❇N❋❙ £5.99 UK • $13.95 Aus $27.70 NZ ISSUE SEVEN I❋✄❇❇❙❏✄❚✄G❇N❏M ◗P❋❙✄❏IP✄I❋✄◗❙❏❉❋? ❉M❇❚❚❏❉✄❍❇N❏❖❍✄❋◗P✄L I❋✄❚IP✄& ❏❚✄❚❇❙✎✄N❇I❋✄❚N❏I ❉P❏❖✏P◗✄❉P❖❋❙❚❏P❖❚ I❏❉I✄IPN❋✄❋❙❚❏P❖✄❇❚✄❈❋❚? ◗M❚✄MP❇❊❚✄NP❙❋✢ I❋✄M❋❋M✄ ❚P❙✄❉P❖❏❖❋❊✎✄ L❋❏I✄❉❇N◗❈❋MM9✎ ❚✄❊❋❚❋❙✄❏❚M❇❖❊✄❊❏❚❉❚ >SYNTAX ERROR! >MISSING COVERDISC? <CONSULT NEWSAGENT> & ❇❙❉❇❊❋✄I❖✄◗❊❇❋ 007 Untitled-1 1 1/9/06 12:55:47 RETRO7 Intro/Hello 11/08/2004 9:36 PM Page 3 hello <EDITORIAL> >10 PRINT "hello" Editor = >20 GOTO 10 Martyn Carroll >RUN ([email protected]) Staff Writer = Shaun Bebbington ([email protected]) Art Editor = Mat Mabe Additonal Design = Roy Birch + Da Beast + Craig Chubb Sub Editors = Rachel White + Katie Hallam Contributors = Richard Burton + David Crookes Jason Darby + Richard Davey Paul Drury + Ant Cooke Andrew Fisher + Richard Hewison Alan Martin + Robert Mellor Craig Vaughan + Iain "Plonker" Warde <PUBLISHING & ADVERTISING> Operations Manager = Debbie Whitham Group Sales & Marketing Manager = Tony Allen hello Advertising Sales = Linda Henry elcome to another horseshit”, there must be a others that we are keeping up Accounts Manager = installment in the Retro thousand Retro Gamer readers our sleeves for now. We’ve also Karen Battrick WGamer saga. I’d like to who disagree. Outnumbered and managed to secure some quality Circulation Manager = Steve Hobbs start by saying a big hello to all outgunned, my friend. coverdisc content, so there’s Marketing Manager = of those who attended the Classic Anyway, back to the show. -

EAI Endorsed Transactions on Serious Games Research Article Game Engines: a Survey
EAI Endorsed Transactions on Serious Games Research Article Game engines: a survey A. Andrade1,* 1 Virtual Campus Lda. Av. Fernão de Magalhães, 716, 1 PT 4350-151, Porto, Portugal – http://virtual-campus.eu Abstract Due to hardware limitations at the origin of the video game industry, each new game was generally coded from the ground up. Years later, from the evolution of hardware and the need for quick game development cycles, spawned the concept of game engine. A game engine is a reusable software layer allowing the separation of common game concepts from the game assets (levels, graphics, etc.). This paper surveys fourteen different game engines relevant today, ranging from the industry-level to the newcomer-friendlier ones. Keywords: animation, game engines, game design, serious games, physics, rendering. Received on 15 October 2015, accepted on 15 October 2015, published on 05 November 2015 Copyright © 2015 António Andrade, licensed to EAI. This is an open access article distributed under the terms of the Creative Commons Attribution licence (http://creativecommons.org/licenses/by/3.0/), which permits unlimited use, distribution and reproduction in any medium so long as the original work is properly cited. doi: 10.4108/eai.5-11-2015.150615 1. Introduction or the concept of game entity) also meant that teams could grow and specialize, improving productivity and game features. In the longer run, it ended transforming the One might think that each new game to date, particularly the typology of game development teams where we will now ones with innovative game mechanics, is developed from typically find several times as many artists as actual scratch as a singular entity, with no relation to previous programmers [3]. -
CROSS-PLATFORM MOBILE APPLICATION DEVELOPMENT Roman Khandozhenko
CROSS-PLATFORM MOBILE APPLICATION DEVELOPMENT Roman Khandozhenko CROSS-PLATFORM MOBILE APPLICATION DEVELOPMENT Roman Khandozhenko Bachelor’s thesis Autumn 2014 Business Information Technology Oulu University of Applied Sciences 2 ABSTRACT Author: Roman Khandozhenko Title Of Thesis: Development Of Cross-Platform Mobile Game Supervisor: Matti Viitala Term and Year of Completion: Autumn 2014 Number of pages: 51 The purpose of this thesis is to develop a cross-platform mobile game and to highlight main aspects of the development process. Game project does not have any commissioner company and no specific requirements. In theoretical part of this thesis main cross-platform development frameworks will be compared and main challenges of mobile development will be defined. In practical part the process of development will be described. The practical outcome of the development will be evaluated, the Glow Hockey 3D game submission to mobile app stores; user’s feedback and download rates will be reviewed, and technical aspects of using cross-platform software development tools will be evaluated. Keywords: cross-platform mobile development, Cocos2d-x, Marmalade SDK 3 CONTENTS 1 INTRODUCTION .............................................................................................................................................. 6 2 CROSS-PLATFORM DEVELOPMENT ....................................................................................................... 8 2.1 Mobile market overview .......................................................................................................................................... -

Extending a Game Engine with Custom Tools
September 10, 2018 Extending a game engine with custom tools Samu Kovanen School of Science Thesis submitted for examination for the degree of Master of Science in Technology. Espoo September 10, 2018 Thesis supervisor and advisor: Prof. Perttu Hämäläinen aalto university abstract of the school of science master’s thesis Author: Samu Kovanen Title: Extending a game engine with custom tools Date: September 10, 2018 Language: English Number of pages: 4+40 Computer, Communications and Information Sciences Professorship: Computer Games Supervisor and advisor: Prof. Perttu Hämäläinen Video games are primarily made using game engines nowadays with an ever increasing abstraction on the details of individual components. The research on the software development methods, software architectures and team and project management is a vast area of interest and has been applied to game development topics widely. However, there has been less focus on how to utilize and manage the individual game development components from the perspective of the entire development team and the creative process. In this thesis the game development is examined through individual game development components called tools. A definition of a tool is presented and their usage and presence in different popular game engines is explored. The tools are categorized to built-in, 1st party and 3rd party tools and their benefits and use-scenarios are compared against each other. In addition the thesis presents and adapts a "Tools Focused Development" methodology, which proposes a set of guidelines that aim to improve the possible benefits gained from developing and utilizing tools during development. The thesis also analyzes several built-in, 1st and 3rd party tools of a popular Unity game engine in the context of tools focused development, and their features and limitations are documented from the usage and management perspective. -
Spellbound: an Activity-Based Outdoor Mobile Multiplayer Game Misha
Spellbound: An activity-based outdoor mobile multiplayer game by Misha Sra Submitted to the Program in Media Arts and Sciences in partial fulfillment of the requirements for the degree of Master of Science in Media Arts and Sciences at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY September 2013 c Massachusetts Institute of Technology 2013. All rights reserved. Author.............................................................. Program in Media Arts and Sciences August 9, 2013 Certified by. Christopher Schmandt Principal Research Scientist MIT Media Lab Thesis Supervisor Accepted by . Patricia Maes Alexander W. Dreyfoos (1954) Professor of Media Technology Associate Academic Head Program in Media Arts and Sciences 2 Spellbound: An activity-based outdoor mobile multiplayer game by Misha Sra Submitted to the Program in Media Arts and Sciences on August 9, 2013, in partial fulfillment of the requirements for the degree of Master of Science in Media Arts and Sciences Abstract Traditional outdoor recreation is physically and emotionally rewarding from goal di- rected social activities and encourages a connection with the real world but can be logistically difficult. Online gaming allows people to play together despite physical distances and differences in time zones. Players enjoy new experiences in awe-inspiring interactive worlds while effectively inactive. This project is a physically active outdoor social game that embeds a layer of fantasy and challenge in the real world employ- ing location-based technologies available on mobile phones. Requiring the game be multiplayer in real-time and played in a physical space presents certain limitations in the design of input and output mechanics. This project demonstrates how those con- straints were managed to create a compelling experience. -
Upinteractive Document Documentation
UPInteractive Document Documentation upltv Nov 09, 2018 Contents 1 About UPSDK 1 1.1 UPSDK Introduce............................................1 1.2 Get Started................................................1 1.3 How to download UPSDK........................................1 1.4 Support & Feedback...........................................1 2 UPSDK Android 3 2.1 Quick Start................................................3 2.2 Solving 65535-Limitation........................................ 12 2.3 SDK Initializating............................................ 14 2.4 Banner Ad................................................ 14 2.5 Interstitial Ad............................................... 17 2.6 Rewarded Video Ad........................................... 19 2.7 GDPR.................................................. 23 2.8 Demo................................................... 27 3 UPSDK IOS 29 3.1 Xcode Access Document......................................... 29 3.2 CocoaPods Access Document...................................... 34 3.3 SDK Initial................................................ 35 3.4 Banner Ad................................................ 36 3.5 Interstitial Ad............................................... 39 3.6 Rewarded Video Ad........................................... 42 3.7 GDPR.................................................. 46 3.8 Demo................................................... 49 4 UPSDK UnityPlugin 51 4.1 UnityPlugin Guide............................................ 51 4.2 How to add plugin