Typical Applications CON-VELR Constant Velocity Joints Are Ideally
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Design and Analysis of Power-Train System of New Pure Electric City Bus
Advances in Engineering Research, volume 90 5th International Conference on Mechanical Engineering, Materials and Energy (ICMEME 2016) Design and Analysis of power-train system of New Pure Electric City Bus Xiao-ying LIU1, Kai WANG1, Li-ping ZHOU1, Ji-sheng WANG* 1Department of Mechanical Engineering, Xihua University, Chengdu, Sichuan 610039, China *Chengdu Medical College, Chengdu, Sichuan 610500, China Keywords: Pure electric city bus, Power-train system, Parametric modeling, Finite element analysis Abstract. Realizing the traffic energy diversification and low exhaust is important to promote competitiveness of the automobile industry in our country and realize sustainable development of the society . Due to the trips of pure electric city bus are relatively short and fixed, it has great application value in urban public transport industry where environmental protection is important. Based on operation characteristics of the pure electric city bus, the overall design of power-train system was completed. The motor was selected using MATLAB. The universal transmission shaft system, main retarder, differential mechanism, wheel drive, driving axle housing and so on were designed. Three-dimensional model of the transmission system was established and the parametric model of the general subsystems was established to facilitate its application in the expansion of the other models. Finally, the finite element analysis of the transmission device of wheel has been done. Introduction Auto demand is increasing rapidly, while the development of auto industry and increase of car ownership will lead to a series of energy and environmental issues directly. Currently, new energy vehicles are developing in worldwide, and there are diverse species such as pure electric vehicles, hybrid vehicles, extended range electric vehicles, fuel cell electric vehicles, and hydrogen engine cars, etc.[1]. -

Design and Analysis of Universal Coupling Joint Maram Venkata Sunil Reddy1, C
ISSN XXXX XXXX © 2016 IJESC Research Article Volume 6 Issue No. 12 Design and Analysis of Universal Coupling Joint Maram Venkata Sunil Reddy1, C. Raghunatha Reddy2 M.Tech Student1, Assistant Professor & H.O.D2 Department of Mechanical Engineering Tadipatri Engineering College, India Abstract: The power produced from an engine of automobile can be transferred to the drive wheel by power transmission system. To transmit the driving torque from the engine or gear unit to the final drive by the propeller shaft, we need at least one or two universal joints. Some common reasons for the failures may be manufacturing and design faults, maintenance faults, raw material faults, material processing faults as well as the user originated faults. In this study, fracture analysis of a universal joint yoke and a drive shaft of an automobile power transmission system are carried out. Spectroscopic analyses, metallographic analyses and hardness measurements are carried out for each part. For the determination of stress conditions at the failed section, stress analysis is also carried out by the finite element method. The common failure types in automobiles and revealed that the failures in the transmission system elements cover 1/4 of all the automobile failures. The failure is analyzed in the ANASYS with FEM. I. INTRODUCTION vehicle. A weld yoke incorporates a machined step, and is inserted into the end of the driveshaft and welded in place. The A coupling is a device used to connect two shafts together at cross trunnion is used to deliver rotation from one yoke to their ends for the purpose of transmitting power. -

Development and Analysis of a Multi-Link Suspension for Racing Applications
Development and analysis of a multi-link suspension for racing applications W. Lamers DCT 2008.077 Master’s thesis Coach: dr. ir. I.J.M. Besselink (Tu/e) Supervisor: Prof. dr. H. Nijmeijer (Tu/e) Committee members: dr. ir. R.M. van Druten (Tu/e) ir. H. Vun (PDE Automotive) Technische Universiteit Eindhoven Department Mechanical Engineering Dynamics and Control Group Eindhoven, May, 2008 Abstract University teams from around the world compete in the Formula SAE competition with prototype formula vehicles. The vehicles have to be developed, build and tested by the teams. The University Racing Eindhoven team from the Eindhoven University of Technology in The Netherlands competes with the URE04 vehicle in the 2007-2008 season. A new multi-link suspension has to be developed to improve handling, driver feedback and performance. Tyres play a crucial role in vehicle dynamics and therefore are tyre models fitted onto tyre measure- ment data such that they can be used to chose the tyre with the best characteristics, and to develop the suspension kinematics of the vehicle. These tyre models are also used for an analytic vehicle model to analyse the influence of vehicle pa- rameters such as its mass and centre of gravity height to develop a design strategy. Lowering the centre of gravity height is necessary to improve performance during cornering and braking. The development of the suspension kinematics is done by using numerical optimization techniques. The suspension kinematic objectives have to be approached as close as possible by relocating the sus- pension coordinates. The most important improvements of the suspension kinematics are firstly the harmonization of camber dependant kinematics which result in the optimal camber angles of the tyres during driving. -
Remove/Install Rack-And-Pinion Steering 11.3.10 MODEL 203 (Except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209
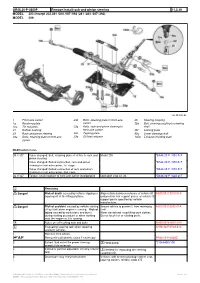
AR46.20-P-0600P Remove/install rack-and-pinion steering 11.3.10 MODEL 203 (except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209 P46.20-2123-09 1 Front axle carrier 23b Bolts, retaining plate to front axle 25 Steering coupling 1g Retaining plate carrier 25a Bolt, steering coupling to steering 10a Tie rod joints 23g Bolts, rack-and-pinion steering to shaft 21 Rubber bushing front axle carrier 25f Locking plate 23 Rack-and-pinion steering 23n Tapping plate 80a Lower steering shaft 23a Bolts, retaining plate to front axle 23q Oil lines retainer 105d Exhaust shielding plate carrier Modification notes 29.11.07 Value changed: Bolt, retaining plate of oil line to rack-and- Model 203 *BA46.20-P-1001-01F pinion steering Value changed: Bolted connection, rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 1st stage Value changed: Bolted connection of rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 2nd stage 30.11.07 Torque, retaining plate to front axle carrier incorporated Operation step 23, 24 *BA46.20-P-1004-01F Removing Danger! Risk of death caused by vehicle slipping or Align vehicle between columns of vehicle lift AS00.00-Z-0010-01A toppling off of the lifting platform. and position four support plates at vehicle lift support points specified by vehicle manufacturer. Danger! Risk of accident caused by vehicle starting Secure vehicle to prevent it from moving by AS00.00-Z-0005-01A off by itself when engine is running. Risk of itself. -

Universal Joint Kits and Center Bearings for Passenger Cars and Trucks
Price $35.00 UNIVERSAL JOINT KITS AND CENTER BEARINGS FOR PASSENGER CARS AND TRUCKS K350-1-DSSP MAY 2008 Supersedes K350, Dated 1999 K350 Table of Contents Constant Velocity Centering Yokes ........................H CHEVROLET (Continued) Constant Velocity Centering Repair Kits .................J MONTE CARLO .................................................. 15 MONZA ...............................................................15 Passenger Car (PASS) NOVA ..................................................................15 VEGA ..................................................................15 ALFA ROMEO .........................................................1 CHRYSLER ...........................................................15 AMERICAN MOTORS ............................................. 1 300 ......................................................................15 AMBASSADOR ..................................................... 1 CONQUEST ........................................................15 CONCORD ...........................................................1 CORDOBA ..........................................................15 EAGLE ..................................................................1 FIFTH AVENUE .................................................. 16 MARLIN ................................................................1 IMPERIAL ...........................................................16 PACER ..................................................................2 LEBARON ...........................................................16 -

Design of Constant Velocity Coupling
Design of Constant Velocity Coupling Prof. A. A. Moghe1, Mr. Yuvraj Patil2, Mr. Mayur Pawar³, Mr. Akshaykumar Thaware4, Mr. Nitin Thorawade5 1Assistant Professor, 2,3,4,5UG Students Department of Mechanical Engineering Sppu, PVPIT, Pune, Mahrashtra, India ABSTRACT: A coupling is mechanical device used to connect two shafts together at their ends for the purpose of transmission of power. The basic role of couplings is to join two parts of rotating elements while permitting some degree of misalignment or end movement or both. Presently Oldham’s coupling and Universal joints are used for parallel offset power transmission and angular offset transmission. These joints have limitations on maximum offset distance, angle, speed and result in vibrations, noise and low efficiency (below 70%). These limitations can be overcome with Thompson constant velocity (CV) coupling which offers features like minimizing side loads, higher misalignment capabilities, more operating speeds, improved efficiency of transmission and many more. The constant velocity joint is an alteration in design that offers up to 18 mm parallel offset and 21-degree angular offset, at high speeds up to 2000 or 2500 rpm at 90% efficiency. This design lowers cost of production, space requirement and simply technology of manufacture as compared too present CVJ in market. This paper presents review on constant velocity joints/couplings design and optimization. Keywords: Thompson constant velocity joint, Optimization & design, Constant velocity couplings, Parallel Offset, Angular Offset, Power Transmission. [I] INTRODUCTION The basic function of a power transmission coupling is to transmit torque from an input/driving shaft to an output/driven shaft at a specified shaft speed. -

Your Steering Column Specialist
Basic Installation Instructions for: ididit’s Universal “Shorty” Columns www.ididitinc.com What’s inside this installation booklet: • U-Joint & Shafting Installation • Shorty Installation • Lever Installation • Wiring your Column • Synchronizing your Column • Additional Notes ididit is... Your Steering Column Specialist For #’s 1011160010, 1011160020, 1011160051, 1010160010, 1010160020, 1010160051, 1020160030, 1020160040, 1160180010, 1160180020, 1160180051, 1120120010, 1520120010, 1120120020, 1520120020, 1120120051, 1520120051, 1120160010, 1520160010, 1120160020, 1520160020, 1120160051, 1520160051, 1030120030, 1030120040, 1030160030, 1030160040, 1130180010, 1530180010, 1130180020, 1530180020, 1130180051, 1530180051, 1050180030, 1050180040, 1180160010, 1180160020, 1180160051, 1040160030, 1040160040, 1190180010, 1190180020, 1190180051, 1590180010, 1590180020, 1590180051 ididit inc. 610 S. Maumee St. Tecumseh, MI 49286 PH: 517-424-0577 FAX: 517-424-7293 Revised 3/5/2012 Instruction # 8000000018 Thank you for purchasing an ididit steering column! We will first give you an overview of mounting the steering column in the most common street rod or hot rod applications. The steering column must be supported at the dash and where it protrudes through the firewall. It is impor- tant that the steering column is tight and secure. There is a shorty application which will use two drops under the dash, with the support bearing through the firewall (since the column ends under the dash). To attach your column to the steering gear box, a u-joint is attached to the column, a shaft is attached to the u-joint, and that shaft will lead down to a u-joint connected to the gear box (or rack). It is highly recommended that you test fit your steering column before painting the column. Test fitting now will save you a headache later on. -
Installation and Operating Manual
Installation and Operating Manual (Translation of the original installation and operating manual) T… (with GPK) Turbo Coupling with Constant Fill, Connecting Coupling Type GPK (All-metal Disk Pack Coupling) including design as per Directive 2014/34/EU (ATEX directive) Version 10 , 2017-06-01 3626-011700 en, Protection Class 0: public Serial No. 1) Coupling type 2) Year of manufacture Mass (weight) kg Power transmission kW Input speed rpm mineral oil Operating fluid water Filling volume dm3 (liters) Number of screws z 3) Nominal response temperature of °C fusible plugs Connecting coupling type GPK Sound pressure level LPA,1m dB Installation position horizontal (max. 7°) Drive via outer wheel 1) Please indicate the serial number in any correspondence ( Chapter 18). 2) T...: oil / TW...: water. 3) Determine and record the number of screws z ( Chapter 10.1). Please consult Voith Turbo in case that the data on the cover sheet are incomplete. Turbo Coupling with constant fill (Connecting Coupling Type GPK) Contact Contact Voith Turbo GmbH & Co. KG Division Industry Voithstr. 1 74564 Crailsheim, GERMANY Tel. + 49 7951 32 599 Fax + 49 7951 32 554 [email protected] www.voith.com/fluid-couplings 3626-011700 en This document describes the state of de- 011700 sign of the product at the time of the - editorial deadline on 2017-06-01. / 3626 / 10 01 - 06 Copyright © by - Voith Turbo GmbH & Co. KG / 2017 / This document is protected by copyright. public 0: It must not be translated, duplicated (mechanically or electronically) in whole or in part, nor passed on to third parties without the publisher's written approval. -

The Structure, Geometry, and Kinematics of a Universal Joint
INDEPENDENT JOURNAL OF MANAGEMENT & PRODUCTION (IJM&P) http://www.ijmp.jor.br v. 10, n. 8, Special Edition Seng 2019 ISSN: 2236-269X DOI: 10.14807/ijmp.v10i8.923 THE STRUCTURE, GEOMETRY, AND KINEMATICS OF A UNIVERSAL JOINT Florian Ion Tiberiu Petrescu IFToMM, Romania E-mail: [email protected] Relly Victoria Virgil Petrescu IFToMM, Romania E-mail: [email protected] Submission: 11/30/2018 Revision: 2/8/2019 Accept: 2/27/2019 ABSTRACT The paper briefly presents the geometry, structure, and kinematics of a universal joint, very commonly used in machine building, especially today for heavy and engine-driven vehicles and transmissions located in different areas as well as for all-wheel-drive vehicles. The universal joint, or the cardan cross, conveys the rotation movement from one bridge to the other (when the rotary shaft suffers both movements, upward and downward). The kinematic scheme of a cardan transmission is composed of two cardan shafts (one input and one output), both of which are equipped with a cardan cross (universal joint or universal joint). Between the two universal couplings, a further (additional) cardan shaft (axle) is mounted. This mechanism is designed to transmit the mechanical movement (within a vehicle) from one bridge to the other. If the vehicle's motor is on the front and with on the rear axle transmission, or vice versa when the vehicle's engine is on the rear and the transmission is on the front axle, or when we have multiple (multi-axle) transmission on heavy vehicles or 4x4 cars. Keywords: Cardan transmission; Universal joint; Heavy vehicles; Angular speed variation; Rotation movement; Geometry; Structure; kinematics. -

Subject-Automobile Engineering TOPIC
BY-JITENDRA KUMAR Date-25/03/2020 Diploma Mechanical 3rd Year (6th Sem) Subject-Automobile Engineering TOPIC:-PROPELLER SHAFT AND REAR AXLE Propeller shaft: The propeller shaft is a driving shaft which connects the transmission main shaft to the differential of the real axle. It transmits the power from gear box to rear axle with the help of universal joints. ... This changes the angle of drive between the propeller shaft and the transmission shaft. Main components Vehicle components and their functions. the essential vehicle components are: a)engines b)flywheel & clutch c)gearbox d)propeller shafts and universal joints (in RWD) e)drive shafts f)final drive g) steering RWD Engine Power Units engine is a machine that takes in a mixture of combustible air and fuel, burns it and convert heat energy released into mechanical energy which rotates then a crankshaft. Gearbox machine that takes engine power from a crankshaft and through a relay of gearwheels. allowing to change the speed of the vehicle. Flywheel the flywheel attached to the end of the crankshaft performs the task of absorbing excess energy while the crankshaft is accelerating on it’s power stroke and automatically transfer this stored kinetic energy to the crankshaft to overcome the resisting motion of the other cycles of the engine that will be described later. Clutch device that is used to separate the engine power unit while running from the final drive allowing the driver to change gears smoothly and bring the vehicle to standstill without engine stalling. Propeller shaft a hollow shaft that is used to transmit gearbox output to the final drive. -

OK Shaft Couplings Contents
OK shaft couplings Contents The clever connection 3 OK couplings explained 4 OKCX and OKFX – friction-coated shaft coupling from SKF 6 More than 50 000 connections 8 Shaft couplings OKC 045 – 090 9 OKC 100 – 190 10 OKC 200 – 400 11 OKC 410 – 490 12 OKC 500 – 520 12 OKC 530 – 1000 13 Friction-coated shaft couplings OKCX 100 – 210 14 OKCX 220 – 490 15 OKCX 500 – 690 16 OKCX 700 – 900 17 Flange couplings OKF 100 – 300 18 OKF 310 – 700 19 Hydraulic rings and propeller nuts OKTC 245 – 790 20 Your individual offer 21 Tailor-made OK couplings 22 Power transmission capacity 23 Shafts 24 Conversion tables 24 Hollow shafts for OKC couplings 25 Hollow shafts for OKF couplings 25 Modular equipment for mounting and dismounting 26 Oil 28 Approved by all leading classiication societies 28 Locating device for outer sleeve and nut 29 Mounting arrangements for OK couplings 29 The SKF Supergrip Bolt cuts downtime 30 22 The clever connection When using OK couplings for shaft connections, you are gaining ben- When the outer sleeve has reached its inal position, an interference eit from the advantages of our powerful oil injection method it is created just as if the outer sleeve had been heated and shrunk on But no heat is required, and the coupling can be removed as eas- Preparation of the shaft is simple There are no keyways to machine, ily as it was mounted no taper and no thrust ring This powerful use of friction enables the OK coupling to transmit When mounting OK coupling, a thin inner sleeve with a tapered outer torque and axial loads over the entire -

Universal Joint
Universal Joint High Shock and Overload Capacity Long Life Heat Treated Alloy Steel Components Minimal Lubrication Required Virtually Backlash- Free Quick Delivery Superior Technology www.renold.com Advantages and Design: Typical Applications Advantages and Features Typical Applications • Domestic manufacture Following is a partial list of applications for the Renold Universal Joint. • High torque capacity • Long bearing life Agitators Packaging • High operating angle capability Balancing Machines Paper Mills Table of Contents Page – Calender Drives • One piece yoke and bearing housing construction Blowers and Fans Introduction .............................................................................................................2 – Sizing and Press Compressors Advantages and Features; • Eliminates unnecessary bolted connections and serrations in yokes Rolls Typical Applications ...............................................................................................3 • Heat treated alloy steel components Conveyors – Couch Rolls Construction and Speed Limits ........................................................................... 4-5 • Ideal loading across entire bearing length due to balanced deflection Cooling Tower Fans – Process Pumps Selection Procedure ............................................................................................ 6-7 between yokes and cross Cranes and Hoists Plastic Manufacturing Engineering Data ..............................................................................................