Formation and Dynamical Evolution of Planetary Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A 12-Year Activity Cycle for HD 219134 3
Accepted for publication in ApJ A Preprint typeset using LTEX style emulateapj v. 5/2/11 A 12-YEAR ACTIVITY CYCLE FOR THE NEARBY PLANET HOST STAR HD 219134 Marshall C. Johnson1, Michael Endl1, William D. Cochran1, Stefano Meschiari1, Paul Robertson2,3,4, Phillip J. MacQueen1, Erik J. Brugamyer1, Caroline Caldwell5, Artie P. Hatzes6, Ivan Ram´ırez1, and Robert A. Wittenmyer7,8,9 Accepted for publication in ApJ ABSTRACT The nearby (6.5 pc) star HD 219134 was recently shown by Motalebi et al. (2015) and Vogt et al. (2015) to host several planets, the innermost of which is transiting. We present twenty-seven years of radial velocity observations of this star from the McDonald Observatory Planet Search program, and nineteen years of stellar activity data. We detect a long-period activity cycle measured in the Ca ii SHK index, with a period of 4230 ± 100 days (11.7 years), very similar to the 11-year Solar activity cycle. Although the period of the Saturn-mass planet HD 219134 h is close to half that of the activity cycle, we argue that it is not an artifact due to stellar activity. We also find a significant periodicity in the SHK data due to stellar rotation with a period of 22.8 days. This is identical to the period of planet f identified by Vogt et al. (2015), suggesting that this radial velocity signal might be caused by rotational modulation of stellar activity rather than a planet. Analysis of our radial velocities allows us to detect the long-period planet HD 219134 h and the transiting super-Earth HD 219134 b. -
![Arxiv:2105.11583V2 [Astro-Ph.EP] 2 Jul 2021 Keck-HIRES, APF-Levy, and Lick-Hamilton Spectrographs](https://docslib.b-cdn.net/cover/4203/arxiv-2105-11583v2-astro-ph-ep-2-jul-2021-keck-hires-apf-levy-and-lick-hamilton-spectrographs-364203.webp)
Arxiv:2105.11583V2 [Astro-Ph.EP] 2 Jul 2021 Keck-HIRES, APF-Levy, and Lick-Hamilton Spectrographs
Draft version July 6, 2021 Typeset using LATEX twocolumn style in AASTeX63 The California Legacy Survey I. A Catalog of 178 Planets from Precision Radial Velocity Monitoring of 719 Nearby Stars over Three Decades Lee J. Rosenthal,1 Benjamin J. Fulton,1, 2 Lea A. Hirsch,3 Howard T. Isaacson,4 Andrew W. Howard,1 Cayla M. Dedrick,5, 6 Ilya A. Sherstyuk,1 Sarah C. Blunt,1, 7 Erik A. Petigura,8 Heather A. Knutson,9 Aida Behmard,9, 7 Ashley Chontos,10, 7 Justin R. Crepp,11 Ian J. M. Crossfield,12 Paul A. Dalba,13, 14 Debra A. Fischer,15 Gregory W. Henry,16 Stephen R. Kane,13 Molly Kosiarek,17, 7 Geoffrey W. Marcy,1, 7 Ryan A. Rubenzahl,1, 7 Lauren M. Weiss,10 and Jason T. Wright18, 19, 20 1Cahill Center for Astronomy & Astrophysics, California Institute of Technology, Pasadena, CA 91125, USA 2IPAC-NASA Exoplanet Science Institute, Pasadena, CA 91125, USA 3Kavli Institute for Particle Astrophysics and Cosmology, Stanford University, Stanford, CA 94305, USA 4Department of Astronomy, University of California Berkeley, Berkeley, CA 94720, USA 5Cahill Center for Astronomy & Astrophysics, California Institute of Technology, Pasadena, CA 91125, USA 6Department of Astronomy & Astrophysics, The Pennsylvania State University, 525 Davey Lab, University Park, PA 16802, USA 7NSF Graduate Research Fellow 8Department of Physics & Astronomy, University of California Los Angeles, Los Angeles, CA 90095, USA 9Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, CA 91125, USA 10Institute for Astronomy, University of Hawai`i, -

Sirius Astronomer
September 2015 Free to members, subscriptions $12 for 12 issues Volume 42, Number 9 Jeff Horne created this image of the crater Copernicus on September 13, 2005 from his observing site in Irvine. September 19 is International Observe The Moon Night, so get out there and have a look at a source of light pollution we really don’t mind! OCA MEETING STAR PARTIES COMING UP The free and open club meeng will The Black Star Canyon site will open on The next session of the Beginners be held September 18 at 7:30 PM in September 5. The Anza site will be open on Class will be held at the Heritage Mu‐ the Irvine Lecture Hall of the Hashing‐ September 12. Members are encouraged to seum of Orange County at 3101 West er Science Center at Chapman Univer‐ check the website calendar for the latest Harvard Street in Santa Ana on Sep‐ sity in Orange. This month, JPL’s Dr. updates on star pares and other events. tember 4. The following class will be Dave Doody will discuss the Grand held October 2. Finale of the historic Cassini mission to Please check the website calendar for the Saturn in 2017! outreach events this month! Volunteers are GOTO SIG: TBA always welcome! Astro‐Imagers SIG: Sept. 8, Oct. 13 NEXT MEETINGS: October 9, Novem‐ Remote Telescopes: TBA You are also reminded to check the web ber 13 Astrophysics SIG: Sept. 11, Oct. 16 site frequently for updates to the calendar Dark Sky Group: TBA of events and other club news. -
Exoplanet.Eu Catalog Page 1 # Name Mass Star Name
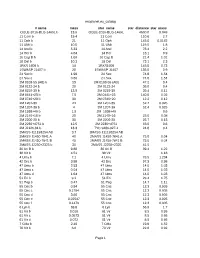
exoplanet.eu_catalog # name mass star_name star_distance star_mass OGLE-2016-BLG-1469L b 13.6 OGLE-2016-BLG-1469L 4500.0 0.048 11 Com b 19.4 11 Com 110.6 2.7 11 Oph b 21 11 Oph 145.0 0.0162 11 UMi b 10.5 11 UMi 119.5 1.8 14 And b 5.33 14 And 76.4 2.2 14 Her b 4.64 14 Her 18.1 0.9 16 Cyg B b 1.68 16 Cyg B 21.4 1.01 18 Del b 10.3 18 Del 73.1 2.3 1RXS 1609 b 14 1RXS1609 145.0 0.73 1SWASP J1407 b 20 1SWASP J1407 133.0 0.9 24 Sex b 1.99 24 Sex 74.8 1.54 24 Sex c 0.86 24 Sex 74.8 1.54 2M 0103-55 (AB) b 13 2M 0103-55 (AB) 47.2 0.4 2M 0122-24 b 20 2M 0122-24 36.0 0.4 2M 0219-39 b 13.9 2M 0219-39 39.4 0.11 2M 0441+23 b 7.5 2M 0441+23 140.0 0.02 2M 0746+20 b 30 2M 0746+20 12.2 0.12 2M 1207-39 24 2M 1207-39 52.4 0.025 2M 1207-39 b 4 2M 1207-39 52.4 0.025 2M 1938+46 b 1.9 2M 1938+46 0.6 2M 2140+16 b 20 2M 2140+16 25.0 0.08 2M 2206-20 b 30 2M 2206-20 26.7 0.13 2M 2236+4751 b 12.5 2M 2236+4751 63.0 0.6 2M J2126-81 b 13.3 TYC 9486-927-1 24.8 0.4 2MASS J11193254 AB 3.7 2MASS J11193254 AB 2MASS J1450-7841 A 40 2MASS J1450-7841 A 75.0 0.04 2MASS J1450-7841 B 40 2MASS J1450-7841 B 75.0 0.04 2MASS J2250+2325 b 30 2MASS J2250+2325 41.5 30 Ari B b 9.88 30 Ari B 39.4 1.22 38 Vir b 4.51 38 Vir 1.18 4 Uma b 7.1 4 Uma 78.5 1.234 42 Dra b 3.88 42 Dra 97.3 0.98 47 Uma b 2.53 47 Uma 14.0 1.03 47 Uma c 0.54 47 Uma 14.0 1.03 47 Uma d 1.64 47 Uma 14.0 1.03 51 Eri b 9.1 51 Eri 29.4 1.75 51 Peg b 0.47 51 Peg 14.7 1.11 55 Cnc b 0.84 55 Cnc 12.3 0.905 55 Cnc c 0.1784 55 Cnc 12.3 0.905 55 Cnc d 3.86 55 Cnc 12.3 0.905 55 Cnc e 0.02547 55 Cnc 12.3 0.905 55 Cnc f 0.1479 55 -

A Naprendszer-Hasonlósági Index
Szegedi Tudományegyetem Természettudományi és Informatikai Kar Kísérleti Fizikai Tanszék Szakdolgozat A Naprendszer-hasonlósági index Készítette: Mészáros Richárd Fizika BSc szakos hallgató Témavezető: Dr. Szatmáry Károly egyetemi tanár Szeged 2020 Tartalomjegyzék 1. Bevezetés……………………………………………………………………..2 2. Az exobolygók felfedezési módszerei………………………………………..2 2.1. Közvetlen módszerek………………………………………………..2 2.2. Közvetett módszerek………………………………………..……….3 3. Az exobolygók osztályozása………………………………………...……….6 4. A Föld-hasonlósági index…………………………………………………….7 5. A Naprendszer-hasonlósági index……………………………………………8 5.1. Első verzió……………………………………………….…………..8 5.2. Második verzió……………………………………………………..11 5.3. Eredmények……………………………………………………...…13 6. Összefoglalás………………………………………………………………..24 Köszönetnyilvánítás……………………………………………………………24 Irodalomjegyzék………………………………………………………………..25 1 1. Bevezetés A felfedezett exobolygók asztrobiológiai potenciáljának vizsgálatára 2011-ben bevezetésre került a Föld-hasonlósági index (ESI, Schulze-Makuch et al. 2011,[2]). Dolgozatom témájául a felfedezett exobolygó rendszerek hasonló módon való vizsgálatát választottam. A második és harmadik fejezetben összefoglalom az exobolygók keresési módszereit és ezen bolygók típusait. A negyedik fejezetben röviden bemutatom a Föld-hasonlósági indexet. Az ötödik fejezetben a Föld-hasonlósági index mintájára bevezetem a Naprendszer-hasonlósági index fogalmát. Ismertetem kiszámításának módját, és alkalmazom a legalább 4 bolygót tartalmazó exobolygó rendszerekre. A kapott eredményekből -

From the Stellar Properties of HD219134 to the Internal
Astronomy & Astrophysics manuscript no. HD219134˙published © ESO 2019 October 31, 2019 From the stellar properties of HD 219134 to the internal compositions of its transiting exoplanets. R. Ligi1, C. Dorn2, A. Crida3;4, Y. Lebreton5;6, O. Creevey3, F. Borsa1, D. Mourard3, N. Nardetto3, I. Tallon-Bosc7, F. Morand3, E. Poretti1. 1 INAF-Osservatorio Astronomico di Brera, Via E. Bianchi 46, I-23807 Merate, Italy e-mail: [email protected] 2 University of Zurich, Institut of Computational Sciences, University of Zurich, Winterthurerstrasse 190, CH-8057, Zurich, Switzerland 3 Universite´ Coteˆ d’Azur, Observatoire de la Coteˆ d’Azur, CNRS, Laboratoire Lagrange, Bd de l’Observatoire, CS 34229, 06304 Nice cedex 4, France 4 Institut Universitaire de France, 103 Boulevard Saint-Michel, 75005 Paris, France 5 LESIA, Observatoire de Paris, PSL Research University, CNRS, Sorbonne Universites,´ UPMC Univ. Paris 06, Univ. Paris Diderot, Sorbonne Paris Cite,´ 92195 Meudon Cedex, France 6 Univ. Rennes, CNRS, IPR (Institut de Physique de Rennes) - UMR 6251, F-35000 Rennes, France 7 Univ. Lyon, Univ. Lyon1, Ens de Lyon, CNRS, Centre de Recherche Astrophysique de Lyon UMR5574, F-69230 Saint-Genis- Laval, France Received 5 July 2019 / Accepted 20 September 2019 ABSTRACT Context. The harvest of exoplanet discoveries has opened the area of exoplanet characterisation. But this cannot be achieved without a careful analysis of the host star parameters. Aims. The system of HD 219134 hosts two transiting exoplanets and at least two additional non-transiting exoplanets. We revisit the properties of this system using direct measurements of the stellar parameters to investigate the composition of the two transiting exoplanets. -

From the Stellar Properties of HD 219134 to the Internal Compositions of Its Transiting Exoplanets R
A&A 631, A92 (2019) https://doi.org/10.1051/0004-6361/201936259 Astronomy & © ESO 2019 Astrophysics From the stellar properties of HD 219134 to the internal compositions of its transiting exoplanets R. Ligi1, C. Dorn2, A. Crida3,4, Y. Lebreton5,6, O. Creevey3, F. Borsa1, D. Mourard3, N. Nardetto3, I. Tallon-Bosc7, F. Morand3, and E. Poretti1 1 INAF – Osservatorio Astronomico di Brera, Via E. Bianchi 46, 23807 Merate, Italy e-mail: [email protected] 2 Institut of Computational Sciences, University of Zurich, Winterthurerstrasse 190, 8057 Zurich, Switzerland 3 Université Côte d’Azur, Observatoire de la Côte d’Azur, CNRS, Laboratoire Lagrange, Bd de l’Observatoire, CS 34229, 06304 Nice Cedex 4, France 4 Institut Universitaire de France, 103 boulevard Saint-Michel, 75005 Paris, France 5 LESIA, Observatoire de Paris, PSL Research University, CNRS, Sorbonne Universités, UPMC Université Paris 06, Université Paris Diderot, Sorbonne Paris Cité, 92195 Meudon Cedex, France 6 Univ. Rennes, CNRS, IPR (Institut de Physique de Rennes) – UMR 6251, 35000 Rennes, France 7 Univ. Lyon, Univ. Lyon1, Ens de Lyon, CNRS, Centre de Recherche Astrophysique de Lyon UMR 5574, 69230 Saint-Genis-Laval, France Received 5 July 2019 / Accepted 20 September 2019 ABSTRACT Context. The harvest of exoplanet discoveries has opened the area of exoplanet characterisation. But this cannot be achieved without a careful analysis of the host star parameters. Aims. The system of HD 219134 hosts two transiting exoplanets and at least two additional non-transiting exoplanets. We revisit the properties of this system using direct measurements of the stellar parameters to investigate the composition of the two transiting exoplanets. -

Exoplanet.Eu Catalog Page 1 Star Distance Star Name Star Mass
exoplanet.eu_catalog star_distance star_name star_mass Planet name mass 1.3 Proxima Centauri 0.120 Proxima Cen b 0.004 1.3 alpha Cen B 0.934 alf Cen B b 0.004 2.3 WISE 0855-0714 WISE 0855-0714 6.000 2.6 Lalande 21185 0.460 Lalande 21185 b 0.012 3.2 eps Eridani 0.830 eps Eridani b 3.090 3.4 Ross 128 0.168 Ross 128 b 0.004 3.6 GJ 15 A 0.375 GJ 15 A b 0.017 3.6 YZ Cet 0.130 YZ Cet d 0.004 3.6 YZ Cet 0.130 YZ Cet c 0.003 3.6 YZ Cet 0.130 YZ Cet b 0.002 3.6 eps Ind A 0.762 eps Ind A b 2.710 3.7 tau Cet 0.783 tau Cet e 0.012 3.7 tau Cet 0.783 tau Cet f 0.012 3.7 tau Cet 0.783 tau Cet h 0.006 3.7 tau Cet 0.783 tau Cet g 0.006 3.8 GJ 273 0.290 GJ 273 b 0.009 3.8 GJ 273 0.290 GJ 273 c 0.004 3.9 Kapteyn's 0.281 Kapteyn's c 0.022 3.9 Kapteyn's 0.281 Kapteyn's b 0.015 4.3 Wolf 1061 0.250 Wolf 1061 d 0.024 4.3 Wolf 1061 0.250 Wolf 1061 c 0.011 4.3 Wolf 1061 0.250 Wolf 1061 b 0.006 4.5 GJ 687 0.413 GJ 687 b 0.058 4.5 GJ 674 0.350 GJ 674 b 0.040 4.7 GJ 876 0.334 GJ 876 b 1.938 4.7 GJ 876 0.334 GJ 876 c 0.856 4.7 GJ 876 0.334 GJ 876 e 0.045 4.7 GJ 876 0.334 GJ 876 d 0.022 4.9 GJ 832 0.450 GJ 832 b 0.689 4.9 GJ 832 0.450 GJ 832 c 0.016 5.9 GJ 570 ABC 0.802 GJ 570 D 42.500 6.0 SIMP0136+0933 SIMP0136+0933 12.700 6.1 HD 20794 0.813 HD 20794 e 0.015 6.1 HD 20794 0.813 HD 20794 d 0.011 6.1 HD 20794 0.813 HD 20794 b 0.009 6.2 GJ 581 0.310 GJ 581 b 0.050 6.2 GJ 581 0.310 GJ 581 c 0.017 6.2 GJ 581 0.310 GJ 581 e 0.006 6.5 GJ 625 0.300 GJ 625 b 0.010 6.6 HD 219134 HD 219134 h 0.280 6.6 HD 219134 HD 219134 e 0.200 6.6 HD 219134 HD 219134 d 0.067 6.6 HD 219134 HD -
![Arxiv:1708.04767V1 [Physics.Geo-Ph] 16 Aug 2017 We Show That the Critical Compositional Parameter, the Mg/Si Ratio, Whose](https://docslib.b-cdn.net/cover/3482/arxiv-1708-04767v1-physics-geo-ph-16-aug-2017-we-show-that-the-critical-compositional-parameter-the-mg-si-ratio-whose-1793482.webp)
Arxiv:1708.04767V1 [Physics.Geo-Ph] 16 Aug 2017 We Show That the Critical Compositional Parameter, the Mg/Si Ratio, Whose
Phase transitions in MgSiO3 post-perovskite in super-Earth mantles Koichiro Umemotoa,b,c,∗, Renata M. Wentzcovitchd,e,f, Shunqing Wuc,g, Min Jic, Cai-Zhuang Wangc, Kai-Ming Hoc aEarth-Life Science Institute, Tokyo Institute of Technology, Ookayama, Meguro-ku, Tokyo 152-8550, Japan bDepartment of Earth Sciences, University of Minnesota, 310 Pillsbury drive SE, Minneapolis, MN 55455, USA cAmes Laboratory, US DOE and Department of Physics and Astronomy, Iowa State University, Ames, Iowa 50011, USA dDepartment of Applied Physics and Applied Mathematics, Columbia University, New York, NY, 10027 eDepartment of Earth and Environmental Sciences, Columbia University, New York, NY, 10027 fLamont-Doherty Earth Observatory, Columbia University, Palisades, NY, 10964 gDepartment of Physics, Xiamen University, Xiamen 361005, China Abstract The highest pressure form of the major Earth-forming mantle silicate is MgSiO3 post-perovskite (PPv). Understanding the fate of PPv at TPa pres- sures is the first step for understanding the mineralogy of super-Earths-type exoplanets, arguably the most interesting for their similarities with Earth. Modeling their internal structure requires knowledge of stable mineral phases, their properties under compression, and major element abundances. Several studies of PPv under extreme pressures support the notion that a sequence of pressure induced dissociation transitions produce the elementary oxides SiO2 and MgO as the ultimate aggregation form at ∼3 TPa. However, none of these studies have addressed the problem of mantle -

Stellar Activity Mimics Planetary Signal in the Habitable Zone of Gliese 832
UNIVERSIDAD DE CONCEPCIÓN FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS MAGÍSTER EN CIENCIAS CON MENCIÓN EN FÍSICA Gliese 832c: ¿Actividad Estelar o Exoplaneta? Gliese 832c: Stellar Activity or Exoplanet? Profesores: Dr. Nicola Astudillo Defru Dr. Ronald Mennickent Cid Dr. Sandro Villanova Tesis para ser presentada a la Dirección de Postgrado de la Universidad de Concepción PAULA GORRINI HUAIQUIMILLA CONCEPCION - CHILE 2020 “... we cannot accept anything as granted, beyond the first mathematical formulae. Question everything else. ” Maria Mitchell iii UNIVERSIDAD DE CONCEPCIÓN Abstract Facultad de Ciencias Físicas y Matemáticas Departmento de Astronomía MSc. Stellar activity mimics planetary signal in the habitable zone of Gliese 832 by Paula GORRINI Exoplanets are planets located outside our Solar System. The search of these objects have grown during the years due to the scientific interest and to the advances on astronomical instrumentation. There are many methods used to detect exoplanets, where one of the most efficient is the radial velocity (RV) method. But this technique accounts false positives as stellar activity can produce RV variation with an ampli- tude of the same order of the one induced by a planetary companion. In this thesis, we study Gliese 832, an M dwarf located 4.96 pc away from us. Two planets orbiting this star were found independently by the RV method: a gas-giant planet in a wide orbit, and a super Earth or mini-Neptune located within the stellar habitable zone. However, the orbital period of this latter planet is close to the stellar rotation period, casting doubts on the planetary origin of this RV signal. -
Extrasolar Planets and Their Host Stars
Kaspar von Braun & Tabetha S. Boyajian Extrasolar Planets and Their Host Stars July 25, 2017 arXiv:1707.07405v1 [astro-ph.EP] 24 Jul 2017 Springer Preface In astronomy or indeed any collaborative environment, it pays to figure out with whom one can work well. From existing projects or simply conversations, research ideas appear, are developed, take shape, sometimes take a detour into some un- expected directions, often need to be refocused, are sometimes divided up and/or distributed among collaborators, and are (hopefully) published. After a number of these cycles repeat, something bigger may be born, all of which one then tries to simultaneously fit into one’s head for what feels like a challenging amount of time. That was certainly the case a long time ago when writing a PhD dissertation. Since then, there have been postdoctoral fellowships and appointments, permanent and adjunct positions, and former, current, and future collaborators. And yet, con- versations spawn research ideas, which take many different turns and may divide up into a multitude of approaches or related or perhaps unrelated subjects. Again, one had better figure out with whom one likes to work. And again, in the process of writing this Brief, one needs create something bigger by focusing the relevant pieces of work into one (hopefully) coherent manuscript. It is an honor, a privi- lege, an amazing experience, and simply a lot of fun to be and have been working with all the people who have had an influence on our work and thereby on this book. To quote the late and great Jim Croce: ”If you dig it, do it. -

Prusaprinters
Exoplanets scaled one in 120 million 3D MODEL ONLY tato_713 VIEW IN BROWSER updated 5. 3. 2021 | published 5. 3. 2021 Summary Some of the most notable Earth-sized exoplanets scaled (smaller than 2.5 Earth diameter). Learning > Physics & Astronomy trappist1h trappist1g trappist1f trappist1e trappist1d trappist1c trappist1b trappist1 trappist terrestrialplanet space scalemodel scaledmodel scale proximacentauri planets planetas planeta planet oceanworld kepler62b kepler62 kepler22b kepler22 kepler11b icegigant extraterrestrial corot7 chthonianplanet chthonian astronomy astronomia Originally published here: Exoplanets scaled one in 120 million by tato_713 - Thingiverse The concept of this post is to compare the size in the same scale of various Earth sized exoplanets with the Earth itself or other astronomical bodies like Neptune. Although there are thousands exoplanets confirmed, I made only some of the most notorious ones with known diameter, and nearly Earth sized (up to 2.5 its diameter). The models are just spheres scaled one in 120 million, to compare with terrestrial planets; one in 250 million; and one in 500 million for the biggest ones. The file's names explained: name_1_x_10_y.stl is 1 : x* 10^y. So _1_6_10_7 is 1:600000000 or one in 60 million. Proxima Centauri b Proxima b is the closest exoplanet known to the Solar System, the closest within the habitable zone of its star, the only known planet in the nearest star, Proxima Centauri, and the only one confirmed in the Alpha Centauri system. As is it said, the host star for the planet is part of the Alpha Centauri system, orbiting the two main stars Alpha Centauri A (Rigil Kentaurus) and B (Toliman).