Stellar Activity Mimics Planetary Signal in the Habitable Zone of Gliese 832
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Lurking in the Shadows: Wide-Separation Gas Giants As Tracers of Planet Formation
Lurking in the Shadows: Wide-Separation Gas Giants as Tracers of Planet Formation Thesis by Marta Levesque Bryan In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy CALIFORNIA INSTITUTE OF TECHNOLOGY Pasadena, California 2018 Defended May 1, 2018 ii © 2018 Marta Levesque Bryan ORCID: [0000-0002-6076-5967] All rights reserved iii ACKNOWLEDGEMENTS First and foremost I would like to thank Heather Knutson, who I had the great privilege of working with as my thesis advisor. Her encouragement, guidance, and perspective helped me navigate many a challenging problem, and my conversations with her were a consistent source of positivity and learning throughout my time at Caltech. I leave graduate school a better scientist and person for having her as a role model. Heather fostered a wonderfully positive and supportive environment for her students, giving us the space to explore and grow - I could not have asked for a better advisor or research experience. I would also like to thank Konstantin Batygin for enthusiastic and illuminating discussions that always left me more excited to explore the result at hand. Thank you as well to Dimitri Mawet for providing both expertise and contagious optimism for some of my latest direct imaging endeavors. Thank you to the rest of my thesis committee, namely Geoff Blake, Evan Kirby, and Chuck Steidel for their support, helpful conversations, and insightful questions. I am grateful to have had the opportunity to collaborate with Brendan Bowler. His talk at Caltech my second year of graduate school introduced me to an unexpected population of massive wide-separation planetary-mass companions, and lead to a long-running collaboration from which several of my thesis projects were born. -

A 12-Year Activity Cycle for HD 219134 3
Accepted for publication in ApJ A Preprint typeset using LTEX style emulateapj v. 5/2/11 A 12-YEAR ACTIVITY CYCLE FOR THE NEARBY PLANET HOST STAR HD 219134 Marshall C. Johnson1, Michael Endl1, William D. Cochran1, Stefano Meschiari1, Paul Robertson2,3,4, Phillip J. MacQueen1, Erik J. Brugamyer1, Caroline Caldwell5, Artie P. Hatzes6, Ivan Ram´ırez1, and Robert A. Wittenmyer7,8,9 Accepted for publication in ApJ ABSTRACT The nearby (6.5 pc) star HD 219134 was recently shown by Motalebi et al. (2015) and Vogt et al. (2015) to host several planets, the innermost of which is transiting. We present twenty-seven years of radial velocity observations of this star from the McDonald Observatory Planet Search program, and nineteen years of stellar activity data. We detect a long-period activity cycle measured in the Ca ii SHK index, with a period of 4230 ± 100 days (11.7 years), very similar to the 11-year Solar activity cycle. Although the period of the Saturn-mass planet HD 219134 h is close to half that of the activity cycle, we argue that it is not an artifact due to stellar activity. We also find a significant periodicity in the SHK data due to stellar rotation with a period of 22.8 days. This is identical to the period of planet f identified by Vogt et al. (2015), suggesting that this radial velocity signal might be caused by rotational modulation of stellar activity rather than a planet. Analysis of our radial velocities allows us to detect the long-period planet HD 219134 h and the transiting super-Earth HD 219134 b. -

The HARPS Search for Southern Extra-Solar Planets XXXV. The
Astronomy & Astrophysics manuscript no. santos_print c ESO 2021 July 9, 2021 The HARPS search for southern extra-solar planets.? XXXV. The interesting case of HD41248: stellar activity, no planets? N.C. Santos1; 2, A. Mortier1, J. P. Faria1; 2, X. Dumusque3; 4, V. Zh. Adibekyan1, E. Delgado-Mena1, P. Figueira1, L. Benamati1; 2, I. Boisse8, D. Cunha1; 2, J. Gomes da Silva1; 2, G. Lo Curto5, C. Lovis3, J. H. C. Martins1; 2, M. Mayor3, C. Melo5, M. Oshagh1; 2, F. Pepe3, D. Queloz3; 9, A. Santerne1, D. Ségransan3, A. Sozzetti7, S. G. Sousa1; 2; 6, and S. Udry3 1 Centro de Astrofísica, Universidade do Porto, Rua das Estrelas, 4150-762 Porto, Portugal 2 Departamento de Física e Astronomia, Faculdade de Ciências, Universidade do Porto, Rua do Campo Alegre, 4169-007 Porto, Portugal 3 Observatoire de Genève, Université de Genève, 51 ch. des Maillettes, CH-1290 Sauverny, Switzerland 4 Harvard-Smithsonian Center for Astrophysics, 60 Garden Street, Cambridge, Massachusetts 02138, USA 5 European Southern Observatory, Casilla 19001, Santiago, Chile 6 Instituto de Astrofísica de Canarias, E-38200 La Laguna, Tenerife, Spain 7 INAF - Osservatorio Astrofisico di Torino, Via Osservatorio 20, I-10025 Pino Torinese, Italy 8 Aix Marseille Université, CNRS, LAM (Laboratoire d’Astrophysique de Marseille) UMR 7326, 13388, Marseille, France 9 Institute of Astronomy, University of Cambridge, Madingley Road, Cambridge, CB3 0HA, UK Received XXX; accepted XXX ABSTRACT Context. The search for planets orbiting metal-poor stars is of uttermost importance for our understanding of the planet formation models. However, no dedicated searches have been conducted so far for very low mass planets orbiting such objects. -

Naming the Extrasolar Planets
Naming the extrasolar planets W. Lyra Max Planck Institute for Astronomy, K¨onigstuhl 17, 69177, Heidelberg, Germany [email protected] Abstract and OGLE-TR-182 b, which does not help educators convey the message that these planets are quite similar to Jupiter. Extrasolar planets are not named and are referred to only In stark contrast, the sentence“planet Apollo is a gas giant by their assigned scientific designation. The reason given like Jupiter” is heavily - yet invisibly - coated with Coper- by the IAU to not name the planets is that it is consid- nicanism. ered impractical as planets are expected to be common. I One reason given by the IAU for not considering naming advance some reasons as to why this logic is flawed, and sug- the extrasolar planets is that it is a task deemed impractical. gest names for the 403 extrasolar planet candidates known One source is quoted as having said “if planets are found to as of Oct 2009. The names follow a scheme of association occur very frequently in the Universe, a system of individual with the constellation that the host star pertains to, and names for planets might well rapidly be found equally im- therefore are mostly drawn from Roman-Greek mythology. practicable as it is for stars, as planet discoveries progress.” Other mythologies may also be used given that a suitable 1. This leads to a second argument. It is indeed impractical association is established. to name all stars. But some stars are named nonetheless. In fact, all other classes of astronomical bodies are named. -

Livre-Ovni.Pdf
UN MONDE BIZARRE Le livre des étranges Objets Volants Non Identifiés Chapitre 1 Paranormal Le paranormal est un terme utilisé pour qualifier un en- mé n'est pas considéré comme paranormal par les semble de phénomènes dont les causes ou mécanismes neuroscientifiques) ; ne sont apparemment pas explicables par des lois scien- tifiques établies. Le préfixe « para » désignant quelque • Les différents moyens de communication avec les chose qui est à côté de la norme, la norme étant ici le morts : naturels (médiumnité, nécromancie) ou ar- consensus scientifique d'une époque. Un phénomène est tificiels (la transcommunication instrumentale telle qualifié de paranormal lorsqu'il ne semble pas pouvoir que les voix électroniques); être expliqué par les lois naturelles connues, laissant ain- si le champ libre à de nouvelles recherches empiriques, à • Les apparitions de l'au-delà (fantômes, revenants, des interprétations, à des suppositions et à l'imaginaire. ectoplasmes, poltergeists, etc.) ; Les initiateurs de la parapsychologie se sont donné comme objectif d'étudier d'une manière scientifique • la cryptozoologie (qui étudie l'existence d'espèce in- ce qu'ils considèrent comme des perceptions extra- connues) : classification assez injuste, car l'objet de sensorielles et de la psychokinèse. Malgré l'existence de la cryptozoologie est moins de cultiver les mythes laboratoires de parapsychologie dans certaines universi- que de chercher s’il y a ou non une espèce animale tés, notamment en Grande-Bretagne, le paranormal est inconnue réelle derrière une légende ; généralement considéré comme un sujet d'étude peu sé- rieux. Il est en revanche parfois associé a des activités • Le phénomène ovni et ses dérivés (cercle de culture). -
![Arxiv:2105.11583V2 [Astro-Ph.EP] 2 Jul 2021 Keck-HIRES, APF-Levy, and Lick-Hamilton Spectrographs](https://docslib.b-cdn.net/cover/4203/arxiv-2105-11583v2-astro-ph-ep-2-jul-2021-keck-hires-apf-levy-and-lick-hamilton-spectrographs-364203.webp)
Arxiv:2105.11583V2 [Astro-Ph.EP] 2 Jul 2021 Keck-HIRES, APF-Levy, and Lick-Hamilton Spectrographs
Draft version July 6, 2021 Typeset using LATEX twocolumn style in AASTeX63 The California Legacy Survey I. A Catalog of 178 Planets from Precision Radial Velocity Monitoring of 719 Nearby Stars over Three Decades Lee J. Rosenthal,1 Benjamin J. Fulton,1, 2 Lea A. Hirsch,3 Howard T. Isaacson,4 Andrew W. Howard,1 Cayla M. Dedrick,5, 6 Ilya A. Sherstyuk,1 Sarah C. Blunt,1, 7 Erik A. Petigura,8 Heather A. Knutson,9 Aida Behmard,9, 7 Ashley Chontos,10, 7 Justin R. Crepp,11 Ian J. M. Crossfield,12 Paul A. Dalba,13, 14 Debra A. Fischer,15 Gregory W. Henry,16 Stephen R. Kane,13 Molly Kosiarek,17, 7 Geoffrey W. Marcy,1, 7 Ryan A. Rubenzahl,1, 7 Lauren M. Weiss,10 and Jason T. Wright18, 19, 20 1Cahill Center for Astronomy & Astrophysics, California Institute of Technology, Pasadena, CA 91125, USA 2IPAC-NASA Exoplanet Science Institute, Pasadena, CA 91125, USA 3Kavli Institute for Particle Astrophysics and Cosmology, Stanford University, Stanford, CA 94305, USA 4Department of Astronomy, University of California Berkeley, Berkeley, CA 94720, USA 5Cahill Center for Astronomy & Astrophysics, California Institute of Technology, Pasadena, CA 91125, USA 6Department of Astronomy & Astrophysics, The Pennsylvania State University, 525 Davey Lab, University Park, PA 16802, USA 7NSF Graduate Research Fellow 8Department of Physics & Astronomy, University of California Los Angeles, Los Angeles, CA 90095, USA 9Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, CA 91125, USA 10Institute for Astronomy, University of Hawai`i, -

Cvetoje- Vic, Anthony Cheetham, Frantz Martinache, Barnaby Norris, Peter Tuthill
Dr Benjamin Pope Lecturer in Astrophysics and DECRA Fellow Advisor: Prof. David Hogg Affiliation: School of Mathematics & Physics University of Queensland, St Lucia, QLD 4072, Australia and Centre for Astrophysics University of Southern Queensland, West Street, Toowoomba, QLD 4350, Australia Homepage: benjaminpope.github.io email: [email protected] orcid: 0000-0003-2595-9114 Education and Previous Positions 2017-2020 NASA Sagan Fellow, New York University Advisor: Prof. David Hogg 2017 Postdoctoral Research Associate, University of Sydney Advisor: Prof. Peter Tuthill 2013-2017 Doctor of Philosophy in Astrophysics, University of Oxford Thesis: “Observing Bright Stars and their Planets from the Earth and from Space” Balliol College | Supervisors: Prof. Suzanne Aigrain, Prof. Patrick Roche 2013-14 Master of Science in Astrophysics, University of Sydney Thesis: “Vision and Revision: Wavefront Sensing from the Image Domain” Supervisor: Prof. Peter Tuthill 2012 Bachelor of Science (Advanced) with Honours in Physics, University of Sydney First Class Honours, with the University Medal Thesis: “Dancing in the Dark: Kernel Phase Interferometry of Ultracool Dwarfs” Supervisors: Prof. Peter Tuthill, Dr. Frantz Martinache 2010-2011 Study Abroad at the University of California, Berkeley Research project with Prof. Charles H. Townes, Infrared Spatial Interferometer. Grants ARC Discovery Early Career Research Award (DECRA) AUD $444,075.00 NASA TESS Cycle 3 Guest Investigator USD $50,000 TESS Cycle 2 Guest Investigator USD $50,000 Balliol Balliol Interdisciplinary Institute Research Grant College GBP £3,000 Teaching 2021 Extragalactic Astrophysics & Cosmology, University of Queensland 2019 Master of Data Science Guest Lecturer, NYU Center for Data Science 2017 Bayesian Reasoning Honours Lecturer, University of Sydney 2017 Honours Project Supervisor, University of Sydney Supervised Alison Wong and Matthew Edwards, both to First Class Honours and PhD acceptance. -
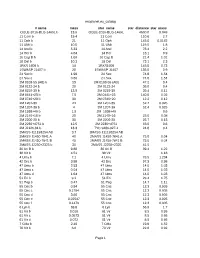
Exoplanet.Eu Catalog Page 1 # Name Mass Star Name
exoplanet.eu_catalog # name mass star_name star_distance star_mass OGLE-2016-BLG-1469L b 13.6 OGLE-2016-BLG-1469L 4500.0 0.048 11 Com b 19.4 11 Com 110.6 2.7 11 Oph b 21 11 Oph 145.0 0.0162 11 UMi b 10.5 11 UMi 119.5 1.8 14 And b 5.33 14 And 76.4 2.2 14 Her b 4.64 14 Her 18.1 0.9 16 Cyg B b 1.68 16 Cyg B 21.4 1.01 18 Del b 10.3 18 Del 73.1 2.3 1RXS 1609 b 14 1RXS1609 145.0 0.73 1SWASP J1407 b 20 1SWASP J1407 133.0 0.9 24 Sex b 1.99 24 Sex 74.8 1.54 24 Sex c 0.86 24 Sex 74.8 1.54 2M 0103-55 (AB) b 13 2M 0103-55 (AB) 47.2 0.4 2M 0122-24 b 20 2M 0122-24 36.0 0.4 2M 0219-39 b 13.9 2M 0219-39 39.4 0.11 2M 0441+23 b 7.5 2M 0441+23 140.0 0.02 2M 0746+20 b 30 2M 0746+20 12.2 0.12 2M 1207-39 24 2M 1207-39 52.4 0.025 2M 1207-39 b 4 2M 1207-39 52.4 0.025 2M 1938+46 b 1.9 2M 1938+46 0.6 2M 2140+16 b 20 2M 2140+16 25.0 0.08 2M 2206-20 b 30 2M 2206-20 26.7 0.13 2M 2236+4751 b 12.5 2M 2236+4751 63.0 0.6 2M J2126-81 b 13.3 TYC 9486-927-1 24.8 0.4 2MASS J11193254 AB 3.7 2MASS J11193254 AB 2MASS J1450-7841 A 40 2MASS J1450-7841 A 75.0 0.04 2MASS J1450-7841 B 40 2MASS J1450-7841 B 75.0 0.04 2MASS J2250+2325 b 30 2MASS J2250+2325 41.5 30 Ari B b 9.88 30 Ari B 39.4 1.22 38 Vir b 4.51 38 Vir 1.18 4 Uma b 7.1 4 Uma 78.5 1.234 42 Dra b 3.88 42 Dra 97.3 0.98 47 Uma b 2.53 47 Uma 14.0 1.03 47 Uma c 0.54 47 Uma 14.0 1.03 47 Uma d 1.64 47 Uma 14.0 1.03 51 Eri b 9.1 51 Eri 29.4 1.75 51 Peg b 0.47 51 Peg 14.7 1.11 55 Cnc b 0.84 55 Cnc 12.3 0.905 55 Cnc c 0.1784 55 Cnc 12.3 0.905 55 Cnc d 3.86 55 Cnc 12.3 0.905 55 Cnc e 0.02547 55 Cnc 12.3 0.905 55 Cnc f 0.1479 55 -

Decoding the Radial Velocity Variations of HD41248 with ESPRESSO
Astronomy & Astrophysics manuscript c ESO 2019 November 27, 2019 Decoding the radial velocity variations of HD41248 with ESPRESSO J. P. Faria1, V. Adibekyan1, E. M. Amazo-Gómez2; 3, S. C. C. Barros1, J. D. Camacho1; 4, O. Demangeon1, P. Figueira5; 1, A. Mortier6, M. Oshagh3; 1, F. Pepe7, N. C. Santos1; 4, J. Gomes da Silva1, A. R. Costa Silva1; 8, S. G. Sousa1, S. Ulmer-Moll1; 4, and P. T. P. Viana1 1 Instituto de Astrofísica e Ciências do Espaço, Universidade do Porto, CAUP, Rua das Estrelas, 4150-762 Porto, Portugal 2 Max-Planck-Institut für Sonnensystemforschung, Justus-von-Liebig-Weg 3, 37077 Göttingen, Germany 3 Institut für Astrophysik, Georg-August-Universität, Friedrich-Hund-Platz 1, D-37077, Göttingen, Germany 4 Departamento de Física e Astronomia, Faculdade de Ciências, Universidade do Porto, Rua Campo Alegre, 4169-007 Porto, Portugal 5 European Southern Observatory, Alonso de Cordova 3107, Vitacura, Santiago, Chile 6 Astrophysics Group, Cavendish Laboratory, University of Cambridge, J.J. Thomson Avenue, Cambridge CB3 0HE, UK 7 Observatoire Astronomique de l’Université de Genève, 51 chemin des Maillettes, 1290, Versoix, Switzerland 8 University of Hertfordshire, School of Physics, Astronomy and Mathematics, College Lane Campus, Hatfield, Hertfordshire, AL10 9AB, UK. Received July 26, 2019; accepted November 21, 2019 ABSTRACT Context. Twenty-four years after the discoveries of the first exoplanets, the radial-velocity (RV) method is still one of the most productive techniques to detect and confirm exoplanets. But stellar magnetic activity can induce RV variations large enough to make it difficult to disentangle planet signals from the stellar noise. -

A Review on Substellar Objects Below the Deuterium Burning Mass Limit: Planets, Brown Dwarfs Or What?
geosciences Review A Review on Substellar Objects below the Deuterium Burning Mass Limit: Planets, Brown Dwarfs or What? José A. Caballero Centro de Astrobiología (CSIC-INTA), ESAC, Camino Bajo del Castillo s/n, E-28692 Villanueva de la Cañada, Madrid, Spain; [email protected] Received: 23 August 2018; Accepted: 10 September 2018; Published: 28 September 2018 Abstract: “Free-floating, non-deuterium-burning, substellar objects” are isolated bodies of a few Jupiter masses found in very young open clusters and associations, nearby young moving groups, and in the immediate vicinity of the Sun. They are neither brown dwarfs nor planets. In this paper, their nomenclature, history of discovery, sites of detection, formation mechanisms, and future directions of research are reviewed. Most free-floating, non-deuterium-burning, substellar objects share the same formation mechanism as low-mass stars and brown dwarfs, but there are still a few caveats, such as the value of the opacity mass limit, the minimum mass at which an isolated body can form via turbulent fragmentation from a cloud. The least massive free-floating substellar objects found to date have masses of about 0.004 Msol, but current and future surveys should aim at breaking this record. For that, we may need LSST, Euclid and WFIRST. Keywords: planetary systems; stars: brown dwarfs; stars: low mass; galaxy: solar neighborhood; galaxy: open clusters and associations 1. Introduction I can’t answer why (I’m not a gangstar) But I can tell you how (I’m not a flam star) We were born upside-down (I’m a star’s star) Born the wrong way ’round (I’m not a white star) I’m a blackstar, I’m not a gangstar I’m a blackstar, I’m a blackstar I’m not a pornstar, I’m not a wandering star I’m a blackstar, I’m a blackstar Blackstar, F (2016), David Bowie The tenth star of George van Biesbroeck’s catalogue of high, common, proper motion companions, vB 10, was from the end of the Second World War to the early 1980s, and had an entry on the least massive star known [1–3]. -

IAU Division C Working Group on Star Names 2019 Annual Report
IAU Division C Working Group on Star Names 2019 Annual Report Eric Mamajek (chair, USA) WG Members: Juan Antonio Belmote Avilés (Spain), Sze-leung Cheung (Thailand), Beatriz García (Argentina), Steven Gullberg (USA), Duane Hamacher (Australia), Susanne M. Hoffmann (Germany), Alejandro López (Argentina), Javier Mejuto (Honduras), Thierry Montmerle (France), Jay Pasachoff (USA), Ian Ridpath (UK), Clive Ruggles (UK), B.S. Shylaja (India), Robert van Gent (Netherlands), Hitoshi Yamaoka (Japan) WG Associates: Danielle Adams (USA), Yunli Shi (China), Doris Vickers (Austria) WGSN Website: https://www.iau.org/science/scientific_bodies/working_groups/280/ WGSN Email: [email protected] The Working Group on Star Names (WGSN) consists of an international group of astronomers with expertise in stellar astronomy, astronomical history, and cultural astronomy who research and catalog proper names for stars for use by the international astronomical community, and also to aid the recognition and preservation of intangible astronomical heritage. The Terms of Reference and membership for WG Star Names (WGSN) are provided at the IAU website: https://www.iau.org/science/scientific_bodies/working_groups/280/. WGSN was re-proposed to Division C and was approved in April 2019 as a functional WG whose scope extends beyond the normal 3-year cycle of IAU working groups. The WGSN was specifically called out on p. 22 of IAU Strategic Plan 2020-2030: “The IAU serves as the internationally recognised authority for assigning designations to celestial bodies and their surface features. To do so, the IAU has a number of Working Groups on various topics, most notably on the nomenclature of small bodies in the Solar System and planetary systems under Division F and on Star Names under Division C.” WGSN continues its long term activity of researching cultural astronomy literature for star names, and researching etymologies with the goal of adding this information to the WGSN’s online materials. -
En Interaktiv Visualisering Av Data Och Upptäcktsmetoder Karin Reidarman
LIU-ITN-TEK-A-018/045--SE Exoplaneter: En Interaktiv Visualisering av Data och Upptäcktsmetoder Karin Reidarman 2018-11-30 Department of Science and Technology Institutionen för teknik och naturvetenskap Linköping University Linköpings universitet nedewS ,gnipökrroN 47 106-ES 47 ,gnipökrroN nedewS 106 47 gnipökrroN LIU-ITN-TEK-A-018/045--SE Exoplaneter: En Interaktiv Visualisering av Data och Upptäcktsmetoder Examensarbete utfört i Medieteknik vid Tekniska högskolan vid Linköpings universitet Karin Reidarman Handledare Emil Axelsson Examinator Anders Ynnerman Norrköping 2018-11-30 Upphovsrätt Detta dokument hålls tillgängligt på Internet – eller dess framtida ersättare – under en längre tid från publiceringsdatum under förutsättning att inga extra- ordinära omständigheter uppstår. Tillgång till dokumentet innebär tillstånd för var och en att läsa, ladda ner, skriva ut enstaka kopior för enskilt bruk och att använda det oförändrat för ickekommersiell forskning och för undervisning. Överföring av upphovsrätten vid en senare tidpunkt kan inte upphäva detta tillstånd. All annan användning av dokumentet kräver upphovsmannens medgivande. För att garantera äktheten, säkerheten och tillgängligheten finns det lösningar av teknisk och administrativ art. Upphovsmannens ideella rätt innefattar rätt att bli nämnd som upphovsman i den omfattning som god sed kräver vid användning av dokumentet på ovan beskrivna sätt samt skydd mot att dokumentet ändras eller presenteras i sådan form eller i sådant sammanhang som är kränkande för upphovsmannens litterära eller konstnärliga anseende eller egenart. För ytterligare information om Linköping University Electronic Press se förlagets hemsida http://www.ep.liu.se/ Copyright The publishers will keep this document online on the Internet - or its possible replacement - for a considerable time from the date of publication barring exceptional circumstances.