A Correspondence-Free Color Chart Design for Color Calibration
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Medical Imaging Working Group
Medical Imaging Working Group Adobe Systems Incorporated, Corporate Headquarters 345 Park Ave, East tower San Jose, CA 95110 USA 13 October 2015 Craig Revie, MIWG chair, opened the meeting at 13:30 and introduced the agenda for the meeting as follows: 1. Using the ICC framework for colour calibration of medical displays 2. Calibration of medical displays using ICC profiles 3. Estimation of errors associated with film-based calibration Summary and status of each area of activity in MIWG: 4. Whole slide imaging 5. Medical photography guidelines 6. Calibration materials for ophthalmology 7. Petri dish imaging 8. Skin imaging 1. Using the ICC framework for colour calibration of medical displays Dr Tom Kimpe presented activities to date on display calibration [see attached]. Visualisation of greyscale images on colour displays had been discussed in August, and the current goal was to extend this to colour images. A new draft of a proposed recommendations document had been circulated [see attached], and he invited feedback so that the document can be finalised. Dr Kimpe showed the calibration framework, in which data is converted to the PCS using a CSDF profile. From feedback received improvements had been made to the profile, full details are in the draft document. New results showing the errors arising from different LUT sizes and gamma values had been included. The importance of using 10-bit data was clear as it minimises calibration error; for LUT size, there was only marginal improvement with a grid spacing of over 30. Accurate modelling was also important. Dr Kimpe showed the draft recommendations that are in the document, and asked for feedback by October 19. -
Automated Color Calibration of Display Devices
Washington University in St. Louis Washington University Open Scholarship All Computer Science and Engineering Research Computer Science and Engineering Report Number: WUCSE-2013-27 2013 Automated Color Calibration of Display Devices Andrew Shulman If you compare two identical images on two different monitors, they will likely appear different. Every display device is supposed to adhere to a particular set of standards regulating the color and intensity of the image it outputs. However, in practice, very few do. Color calibration is the practice of modifying the signal path such that the colors produced more closely match reference standards. This is essential for graphics professionals who are mastering original content. They must ensure that the source material appears correct when viewed on a reference monitor. When viewed on a consumer panel, however, some error... Read complete abstract on page 2. Follow this and additional works at: https://openscholarship.wustl.edu/cse_research Part of the Computer Engineering Commons, and the Computer Sciences Commons Recommended Citation Shulman, Andrew, "Automated Color Calibration of Display Devices" Report Number: WUCSE-2013-27 (2013). All Computer Science and Engineering Research. https://openscholarship.wustl.edu/cse_research/102 Department of Computer Science & Engineering - Washington University in St. Louis Campus Box 1045 - St. Louis, MO - 63130 - ph: (314) 935-6160. This technical report is available at Washington University Open Scholarship: https://openscholarship.wustl.edu/ cse_research/102 Automated Color Calibration of Display Devices Andrew Shulman Complete Abstract: If you compare two identical images on two different monitors, they will likely appear different. Every display device is supposed to adhere to a particular set of standards regulating the color and intensity of the image it outputs. -

ROCK-COLOR CHART with Genuine Munsell® Color Chips
geological ROCK-COLOR CHART with genuine Munsell® color chips Produced by geological ROCK-COLOR CHART with genuine Munsell® color chips 2009 Year Revised | 2009 Production Date put into use This publication is a revision of the previously published Geological Society of America (GSA) Rock-Color Chart prepared by the Rock-Color Chart Committee (representing the U.S. Geological Survey, GSA, the American Association of Petroleum Geologists, the Society of Economic Geologists, and the Association of American State Geologists). Colors within this chart are the same as those used in previous GSA editions, and the chart was produced in cooperation with GSA. Produced by 4300 44th Street • Grand Rapids, MI 49512 • Tel: 877-888-1720 • munsell.com The Rock-Color Chart The pages within this book are cleanable and can be exposed to the standard environmental conditions that are met in the field. This does not mean that the book will be able to withstand all of the environmental conditions that it is exposed to in the field. For the cleaning of the colored pages, please make sure not to use a cleaning agent or materials that are coarse in nature. These materials could either damage the surface of the color chips or cause the color chips to start to delaminate from the pages. With the specifying of the rock color it is important to remember to replace the rock color chart book on a regular basis so that the colors being specified are consistent from one individual to another. We recommend that you mark the date when you started to use the the book. -

Ph.D. Thesis Abstractindex
COLOR REPRODUCTION OF FACIAL PATTERN AND ENDOSCOPIC IMAGE BASED ON COLOR APPEARANCE MODELS December 1996 Francisco Hideki Imai Graduate School of Science and Technology Chiba University, JAPAN Dedicated to my parents ii COLOR REPRODUCTION OF FACIAL PATTERN AND ENDOSCOPIC IMAGE BASED ON COLOR APPEARANCE MODELS A dissertation submitted to the Graduate School of Science and Technology of Chiba University in partial fulfillment of the requirements for the degree of Doctor of Philosophy by Francisco Hideki Imai December 1996 iii Declaration This is to certify that this work has been done by me and it has not been submitted elsewhere for the award of any degree or diploma. Countersigned Signature of the student ___________________________________ _______________________________ Yoichi Miyake, Professor Francisco Hideki Imai iv The undersigned have examined the dissertation entitled COLOR REPRODUCTION OF FACIAL PATTERN AND ENDOSCOPIC IMAGE BASED ON COLOR APPEARANCE MODELS presented by _______Francisco Hideki Imai____________, a candidate for the degree of Doctor of Philosophy, and hereby certify that it is worthy of acceptance. ______________________________ ______________________________ Date Advisor Yoichi Miyake, Professor EXAMINING COMMITTEE ____________________________ Yoshizumi Yasuda, Professor ____________________________ Toshio Honda, Professor ____________________________ Hirohisa Yaguchi, Professor ____________________________ Atsushi Imiya, Associate Professor v Abstract In recent years, many imaging systems have been developed, and it became increasingly important to exchange image data through the computer network. Therefore, it is required to reproduce color independently on each imaging device. In the studies of device independent color reproduction, colorimetric color reproduction has been done, namely color with same chromaticity or tristimulus values is reproduced. However, even if the tristimulus values are the same, color appearance is not always same under different viewing conditions. -

Medtronic Brand Color Chart
Medtronic Brand Color Chart Medtronic Visual Identity System: Color Ratios Navy Blue Medtronic Blue Cobalt Blue Charcoal Blue Gray Dark Gray Yellow Light Orange Gray Orange Medium Blue Sky Blue Light Blue Light Gray Pale Gray White Purple Green Turquoise Primary Blue Color Palette 70% Primary Neutral Color Palette 20% Accent Color Palette 10% The Medtronic Brand Color Palette was created for use in all material. Please use the CMYK, RGB, HEX, and LAB values as often as possible. If you are not able to use the LAB values, you can use the Pantone equivalents, but be aware the color output will vary from the other four color breakdowns. If you need a spot color, the preference is for you to use the LAB values. Primary Blue Color Palette Navy Blue Medtronic Blue C: 100 C: 99 R: 0 L: 15 R: 0 L: 31 M: 94 Web/HEX Pantone M: 74 Web/HEX Pantone G: 30 A: 2 G: 75 A: -2 Y: 47 #001E46 533 C Y: 17 #004B87 2154 C B: 70 B: -20 B: 135 B: -40 K: 43 K: 4 Cobalt Blue Medium Blue C: 81 C: 73 R: 0 L: 52 R: 0 L: 64 M: 35 Web/HEX Pantone M: 12 Web/HEX Pantone G: 133 A: -12 G: 169 A: -23 Y: 0 #0085CA 2382 C Y: 0 #00A9E0 2191 C B: 202 B: -45 B: 224 B: -39 K: 0 K : 0 Sky Blue Light Blue C: 55 C: 29 R: 113 L: 75 R: 185 L: 85 M: 4 Web/HEX Pantone M: 5 Web/HEX Pantone G: 197 A: -20 G: 217 A: -9 Y: 4 #71C5E8 297 C Y: 5 #B9D9EB 290 C B: 232 B: -26 B: 235 B: -13 K: 0 K: 0 Primary Neutral Color Palette Charcoal Gray Blue Gray C: 0 Pantone C: 68 R: 83 L: 36 R: 91 L: 51 M: 0 Web/HEX Cool M: 40 Web/HEX Pantone G: 86 A: 0 G: 127 A: -9 Y: 0 #53565a Gray Y: 28 #5B7F95 5415 -

Digital Color Workflows and the HP Dreamcolor Lp2480zx Professional Display
Digital Color Workflows and the HP DreamColor LP2480zx Professional Display Improving accuracy and predictability in color processing at the designer’s desk can increase productivity and improve quality of digital color projects in animation, game development, film/video post production, broadcast, product design, graphic arts and photography. Introduction ...................................................................................................................................2 Managing color .............................................................................................................................3 The property of color ...................................................................................................................3 The RGB color set ....................................................................................................................3 The CMYK color set .................................................................................................................3 Color spaces...........................................................................................................................4 Gamuts..................................................................................................................................5 The digital workflow ....................................................................................................................5 Color profiles..........................................................................................................................5 -
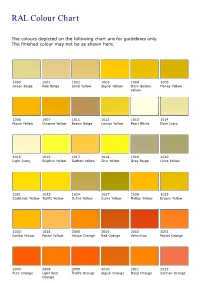
RAL Colour Chart
RAL Colour Chart The colours depicted on the following chart are for guidelines only. The finished colour may not be as shown here. 1000 1001 1002 1003 1004 1005 Green Beige Pale Beige Sand Yellow Signal Yellow Dark Golden Honey Yellow Yellow 1006 1007 1011 1012 1013 1014 Maize Yellow Chrome Yellow Brown Beige Lemon Yellow Pearl White Dark Ivory 1015 1016 1017 1018 1019 1020 Light Ivory Sulphur Yellow Saffron Yellow Zinc Yellow Grey Beige Olive Yellow 1021 1023 1024 1027 1028 1032 Cadmium Yellow Traffic Yellow Ochre Yellow Curry Yellow Mellon Yellow Broom Yellow 1033 1034 2000 2001 2002 2003 Dahlia Yellow Pastel Yellow Yellow Orange Red Orange Vermillion Pastel Orange 2004 2008 2009 2010 2011 2012 Pure Orange Light Red Traffic Orange Signal Orange Deep Orange Salmon Orange Orange 3000 3001 3002 3003 3004 3005 Flame Red RAL Signal Red Carmine Red Ruby Red Purple Red Wine Red 3007 3009 3011 3012 3013 3014 Black Red Oxide Red Brown Red Beige Red Tomato Red Antique Pink 3015 3016 3017 3018 3020 3022 Light Pink Coral Red Rose Strawberry Red Traffic Red Dark Salmon Red 3027 3031 4001 4002 4003 4004 Raspberry Red Orient Red Red Lilac Red Violet Heather Violet Claret Violet 4005 4006 4007 4008 4009 4010 Blue Lilac Traffic Purple Purple Violet Signal Violet Pastel Violet Telemagenta 5000 5001 5002 5003 5004 5005 Violet Blue Green Blue Ultramarine Blue dark Sapphire Black Blue Signal Blue Blue 5007 5008 5009 5010 5011 5012 Brilliant Blue Grey Blue Light Azure Blue Gentian Blue Steel Blue Light Blue 5013 5014 5015 5017 5018 5019 Dark Cobalt Blue -

Color Calibration
B Color Calibration All photographers are concerned with accurate and pleasing color rendition, be it on monitors or in prints; and there may be no more critical audience, in more than one sense, than the wedding couple and their circle of friends and family. You want your work to look its absolute best, whether you are presenting the Proofing Show on your laptop, showing the crown jewel of your work—the wedding album—or even running a quick slideshow of pleasing pictures taken earlier, at the reception. As with everything else connected with digital photogra- phy, this does not happen by magic. As usual, a bit of technical knowledge is nec- essary, along with some preparation with your monitor, and perhaps your camera and scanner as well, using some tools and tests to tune your devices so that the colors you display closely match each other, and look good doing it. We’ll explain the necessity in relatively painless technical terms, then present effective tools and procedures for calibrating your equipment, including important tips, advice on choosing appropriate equipment, and links to further information all the way out to the physics of light and color for adventurous readers. Did You Notice That Red Light? If you have ever heard that question, you might carefully consider asking politely about yellow or green, but you would probably not ask, “What do you mean by ‘red’?” Color, however, is a slippery concept, except when physicists speak in terms of the length of light waves, and even then there are arbitrary divisions and nam- ing conventions. -

RAL COLOR CHART ***** This Chart Is to Be Used As a Guide Only. Colors May Appear Slightly Different ***** Green Beige Purple V
RAL COLOR CHART ***** This Chart is to be used as a guide only. Colors May Appear Slightly Different ***** RAL 1000 Green Beige RAL 4007 Purple Violet RAL 7008 Khaki Grey RAL 4008 RAL 7009 RAL 1001 Beige Signal Violet Green Grey Tarpaulin RAL 1002 Sand Yellow RAL 4009 Pastel Violet RAL 7010 Grey RAL 1003 Signal Yellow RAL 5000 Violet Blue RAL 7011 Iron Grey RAL 1004 Golden Yellow RAL 5001 Green Blue RAL 7012 Basalt Grey Ultramarine RAL 1005 Honey Yellow RAL 5002 RAL 7013 Brown Grey Blue RAL 1006 Maize Yellow RAL 5003 Saphire Blue RAL 7015 Slate Grey Anthracite RAL 1007 Chrome Yellow RAL 5004 Black Blue RAL 7016 Grey RAL 1011 Brown Beige RAL 5005 Signal Blue RAL 7021 Black Grey RAL 1012 Lemon Yellow RAL 5007 Brillant Blue RAL 7022 Umbra Grey Concrete RAL 1013 Oyster White RAL 5008 Grey Blue RAL 7023 Grey Graphite RAL 1014 Ivory RAL 5009 Azure Blue RAL 7024 Grey Granite RAL 1015 Light Ivory RAL 5010 Gentian Blue RAL 7026 Grey RAL 1016 Sulfer Yellow RAL 5011 Steel Blue RAL 7030 Stone Grey RAL 1017 Saffron Yellow RAL 5012 Light Blue RAL 7031 Blue Grey RAL 1018 Zinc Yellow RAL 5013 Cobolt Blue RAL 7032 Pebble Grey Cement RAL 1019 Grey Beige RAL 5014 Pigieon Blue RAL 7033 Grey RAL 1020 Olive Yellow RAL 5015 Sky Blue RAL 7034 Yellow Grey RAL 1021 Rape Yellow RAL 5017 Traffic Blue RAL 7035 Light Grey Platinum RAL 1023 Traffic Yellow RAL 5018 Turquiose Blue RAL 7036 Grey RAL 1024 Ochre Yellow RAL 5019 Capri Blue RAL 7037 Dusty Grey RAL 1027 Curry RAL 5020 Ocean Blue RAL 7038 Agate Grey RAL 1028 Melon Yellow RAL 5021 Water Blue RAL 7039 Quartz Grey -

340 K2017D.Pdf
Contents / Contenido Introduction Game Introducción Color 4 49 Model Game Color Air 7 54 Liquid Color Cases Gold Maletines 16 56 Model Weathering Air Effects 17 60 Metal Pigments Color Pigmentos 42 68 Panzer Model Wash Aces Lavados 46 72 Surface Primer Paint Imprimación Stand 76 90 Diorama Accessories Effects Accesorios 78 92 Premium Publications RC Color Publicaciones 82 94 Auxiliaries Displays Auxiliares Expositores 84 97 Brushes Health & Safety Pinceles Salud y seguridad 88 102 Made in Spain All colors in our catalogue conform to ASTM Pictures courtesy by: Due to the printing process, the colors D-4236 standards and EEC regulation 67/548/ Imágenes cedidas por: reproduced in this catalogue are to be considered CEE, and do not require health labelling. as approximate only, and may not correspond Avatars of War, Juanjo Baron, José Brito, Murat exactly to the originals. Todos los colores en nuestro catálogo están Conform to Özgül, Chema Cabrero, Freebooterminiatures, ASTM D-4236 conformes con las normas ASTM D-4236 (American Angel Giraldez, Raúl Garcia La Torre, Jaime Ortiz, Debido a la impresión en cuatricromía, los colores and Society for Testing and Materials) y con la normativa en este catálogo pueden variar de los colores EEC regulation Plastic Soldier Company Ltd, Euromodelismo, 67/548/CEE Europea 67/548/ CEE. Robert Karlsson “Rogland”, Scratchmod. originales, y su reproducción es tan solo orientativa. Introduction The Vallejo Company was established in 1965, in New Jersey, EN U.S.A. In the first years the company specialized in the manufacture of Film Color, waterbased acrylic colors for animated films (cartoons). -

Gamut Mapping Algorithm Using Lightness Mapping and Multiple Anchor Points for Linear Tone and Maximum Chroma Reproduction
JOURNAL OF IMAGING SCIENCE AND TECHNOLOGY® • Volume 45, Number 3, May/June 2001 Feature Article Gamut Mapping Algorithm Using Lightness Mapping and Multiple Anchor Points for Linear Tone and Maximum Chroma Reproduction Chae-Soo Lee,L Yang-Woo Park, Seok-Je Cho,* and Yeong-Ho Ha† Department of Software Engineering, Kyungwoon University, Kyungbuk, Korea * Department of Control and Instrumentation Engineering, Korea Maritime University, Yeongdo-ku Pusan, Korea † School of Electronic and Electrical Engineering, Kyungpook National University, Taegu, Korea This article proposes a new gamut-mapping algorithm (GMA) that utilizes both lightness mapping and multiple anchor points. The proposed lightness mapping minimizes the lightness difference of the maximum chroma between two gamuts and produces the linear tone in bright and dark regions. In the chroma mapping, a separate mapping method that utilizes multiple anchor points with constant slopes plus a fixed anchor point is proposed to maintain the maximum chroma and produce a uniform tonal dynamic range. As a result, the proposed algorithm is able to reproduce high quality images using low-cost color devices. Journal of Imaging Science and Technology 45: 209–223 (2001) Introduction of the reproduction’s. Therefore, if the lightness values Some practical output systems are only capable of pro- of the maximum chroma in the two gamuts are not lo- ducing a limited range of colors. The range of produc- cated at the center of the lightness axis of the two media, ible colors on a device is referred to as its gamut. Often, the parametric GMA will produce a different color change an image will contain colors that are outside the gamut in the bright and dark regions. -

Computational RYB Color Model and Its Applications
IIEEJ Transactions on Image Electronics and Visual Computing Vol.5 No.2 (2017) -- Special Issue on Application-Based Image Processing Technologies -- Computational RYB Color Model and its Applications Junichi SUGITA† (Member), Tokiichiro TAKAHASHI†† (Member) †Tokyo Healthcare University, ††Tokyo Denki University/UEI Research <Summary> The red-yellow-blue (RYB) color model is a subtractive model based on pigment color mixing and is widely used in art education. In the RYB color model, red, yellow, and blue are defined as the primary colors. In this study, we apply this model to computers by formulating a conversion between the red-green-blue (RGB) and RYB color spaces. In addition, we present a class of compositing methods in the RYB color space. Moreover, we prescribe the appropriate uses of these compo- siting methods in different situations. By using RYB color compositing, paint-like compositing can be easily achieved. We also verified the effectiveness of our proposed method by using several experiments and demonstrated its application on the basis of RYB color compositing. Keywords: RYB, RGB, CMY(K), color model, color space, color compositing man perception system and computer displays, most com- 1. Introduction puter applications use the red-green-blue (RGB) color mod- Most people have had the experience of creating an arbi- el3); however, this model is not comprehensible for many trary color by mixing different color pigments on a palette or people who not trained in the RGB color model because of a canvas. The red-yellow-blue (RYB) color model proposed its use of additive color mixing. As shown in Fig.