Discipline of Programming.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

COM 113 INTRO to COMPUTER PROGRAMMING Theory Book
1 [Type the document title] UNESCO -NIGERIA TECHNICAL & VOCATIONAL EDUCATION REVITALISATION PROJECT -PHASE II NATIONAL DIPLOMA IN COMPUTER TECHNOLOGY Computer Programming COURSE CODE: COM113 YEAR I - SE MESTER I THEORY Version 1: December 2008 2 [Type the document title] Table of Contents WEEK 1 Concept of programming ................................................................................................................ 6 Features of a good computer program ............................................................................................ 7 System Development Cycle ............................................................................................................ 9 WEEK 2 Concept of Algorithm ................................................................................................................... 11 Features of an Algorithm .............................................................................................................. 11 Methods of Representing Algorithm ............................................................................................ 11 Pseudo code .................................................................................................................................. 12 WEEK 3 English-like form .......................................................................................................................... 15 Flowchart ..................................................................................................................................... -

Software Development Career Pathway
Career Exploration Guide Software Development Career Pathway Information Technology Career Cluster For more information about NYC Career and Technical Education, visit: www.cte.nyc Summer 2018 Getting Started What is software? What Types of Software Can You Develop? Computers and other smart devices are made up of Software includes operating systems—like Windows, Web applications are websites that allow users to contact management system, and PeopleSoft, a hardware and software. Hardware includes all of the Apple, and Google Android—and the applications check email, share documents, and shop online, human resources information system. physical parts of a device, like the power supply, that run on them— like word processors and games. among other things. Users access them with a Mobile applications are programs that can be data storage, and microprocessors. Software contains Software applications can be run directly from a connection to the Internet through a web browser accessed directly through mobile devices like smart instructions that are stored and run by the hardware. device or through a connection to the Internet. like Firefox, Chrome, or Safari. Web browsers are phones and tablets. Many mobile applications have Other names for software are programs or applications. the platforms people use to find, retrieve, and web-based counterparts. display information online. Web browsers are applications too. Desktop applications are programs that are stored on and accessed from a computer or laptop, like Enterprise software are off-the-shelf applications What is Software Development? word processors and spreadsheets. that are customized to the needs of businesses. Popular examples include Salesforce, a customer Software development is the design and creation of Quality Testers test the application to make sure software and is usually done by a team of people. -

A Politico-Social History of Algolt (With a Chronology in the Form of a Log Book)
A Politico-Social History of Algolt (With a Chronology in the Form of a Log Book) R. w. BEMER Introduction This is an admittedly fragmentary chronicle of events in the develop ment of the algorithmic language ALGOL. Nevertheless, it seems perti nent, while we await the advent of a technical and conceptual history, to outline the matrix of forces which shaped that history in a political and social sense. Perhaps the author's role is only that of recorder of visible events, rather than the complex interplay of ideas which have made ALGOL the force it is in the computational world. It is true, as Professor Ershov stated in his review of a draft of the present work, that "the reading of this history, rich in curious details, nevertheless does not enable the beginner to understand why ALGOL, with a history that would seem more disappointing than triumphant, changed the face of current programming". I can only state that the time scale and my own lesser competence do not allow the tracing of conceptual development in requisite detail. Books are sure to follow in this area, particularly one by Knuth. A further defect in the present work is the relatively lesser availability of European input to the log, although I could claim better access than many in the U.S.A. This is regrettable in view of the relatively stronger support given to ALGOL in Europe. Perhaps this calmer acceptance had the effect of reducing the number of significant entries for a log such as this. Following a brief view of the pattern of events come the entries of the chronology, or log, numbered for reference in the text. -

Advancing Automatic Programming: Regeneration, Meta-Circularity, and Two-Sided Interfaces
SOFTNET 2019 Advancing Automatic Programming: Regeneration, Meta-circularity, and Two-Sided Interfaces HERWIGMANNAERT NOVEMBER 2 7 , 2 0 1 9 • Automatic Programming • Toward Automatic Regeneration • Creating Meta-Circular Regeneration • On Meta-Programming Interfaces ADVANCING AUTOMATIC PROGRAMMING • Concluding Facts and Thoughts Overview • Questions and Discussion • Automatic Programming • Concept and Trends • Remaining Challenges • Toward Automatic Regeneration ADVANCING AUTOMATIC PROGRAMMING • Creating Meta-Circular Regeneration • On Meta-Programming Interfaces Overview • Concluding Facts and Thoughts • Questions and Discussion Automatic Programming • Automatic programming: • The act of automatically generating source code from a model or template • Sometimes distinguished from code generation, as performed by a compiler • Has always been a euphemism for programming in a higher-level language than was then available to the programmer [David Parnas] • Also referred to a generative or meta-programming • To manufacture software components in an automated way • It is as old as programming itself: System.out.println(“Hello world.”); System.out.println(“System.out.println(\“Hello world.\”);”); The Need for Automatic Programming • Goal is and has always been to improve programmer productivity • In general, to manufacture software components in an automated way, in the same way as automation in the industrial revolution, would: • Increase programming productivity • Consolidate programming knowledge • Eliminate human programming errors • Such -
Chapter 1 Introduction to Computers, Programs, and Java
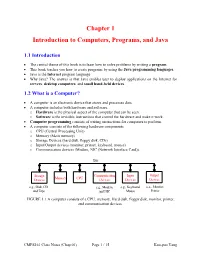
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -

FUNDAMENTALS of COMPUTING (2019-20) COURSE CODE: 5023 502800CH (Grade 7 for ½ High School Credit) 502900CH (Grade 8 for ½ High School Credit)
EXPLORING COMPUTER SCIENCE NEW NAME: FUNDAMENTALS OF COMPUTING (2019-20) COURSE CODE: 5023 502800CH (grade 7 for ½ high school credit) 502900CH (grade 8 for ½ high school credit) COURSE DESCRIPTION: Fundamentals of Computing is designed to introduce students to the field of computer science through an exploration of engaging and accessible topics. Through creativity and innovation, students will use critical thinking and problem solving skills to implement projects that are relevant to students’ lives. They will create a variety of computing artifacts while collaborating in teams. Students will gain a fundamental understanding of the history and operation of computers, programming, and web design. Students will also be introduced to computing careers and will examine societal and ethical issues of computing. OBJECTIVE: Given the necessary equipment, software, supplies, and facilities, the student will be able to successfully complete the following core standards for courses that grant one unit of credit. RECOMMENDED GRADE LEVELS: 9-12 (Preference 9-10) COURSE CREDIT: 1 unit (120 hours) COMPUTER REQUIREMENTS: One computer per student with Internet access RESOURCES: See attached Resource List A. SAFETY Effective professionals know the academic subject matter, including safety as required for proficiency within their area. They will use this knowledge as needed in their role. The following accountability criteria are considered essential for students in any program of study. 1. Review school safety policies and procedures. 2. Review classroom safety rules and procedures. 3. Review safety procedures for using equipment in the classroom. 4. Identify major causes of work-related accidents in office environments. 5. Demonstrate safety skills in an office/work environment. -

About ILE C/C++ Compiler Reference
IBM i 7.3 Programming IBM Rational Development Studio for i ILE C/C++ Compiler Reference IBM SC09-4816-07 Note Before using this information and the product it supports, read the information in “Notices” on page 121. This edition applies to IBM® Rational® Development Studio for i (product number 5770-WDS) and to all subsequent releases and modifications until otherwise indicated in new editions. This version does not run on all reduced instruction set computer (RISC) models nor does it run on CISC models. This document may contain references to Licensed Internal Code. Licensed Internal Code is Machine Code and is licensed to you under the terms of the IBM License Agreement for Machine Code. © Copyright International Business Machines Corporation 1993, 2015. US Government Users Restricted Rights – Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents ILE C/C++ Compiler Reference............................................................................... 1 What is new for IBM i 7.3.............................................................................................................................3 PDF file for ILE C/C++ Compiler Reference.................................................................................................5 About ILE C/C++ Compiler Reference......................................................................................................... 7 Prerequisite and Related Information.................................................................................................. -

Security Applications of Formal Language Theory
Dartmouth College Dartmouth Digital Commons Computer Science Technical Reports Computer Science 11-25-2011 Security Applications of Formal Language Theory Len Sassaman Dartmouth College Meredith L. Patterson Dartmouth College Sergey Bratus Dartmouth College Michael E. Locasto Dartmouth College Anna Shubina Dartmouth College Follow this and additional works at: https://digitalcommons.dartmouth.edu/cs_tr Part of the Computer Sciences Commons Dartmouth Digital Commons Citation Sassaman, Len; Patterson, Meredith L.; Bratus, Sergey; Locasto, Michael E.; and Shubina, Anna, "Security Applications of Formal Language Theory" (2011). Computer Science Technical Report TR2011-709. https://digitalcommons.dartmouth.edu/cs_tr/335 This Technical Report is brought to you for free and open access by the Computer Science at Dartmouth Digital Commons. It has been accepted for inclusion in Computer Science Technical Reports by an authorized administrator of Dartmouth Digital Commons. For more information, please contact [email protected]. Security Applications of Formal Language Theory Dartmouth Computer Science Technical Report TR2011-709 Len Sassaman, Meredith L. Patterson, Sergey Bratus, Michael E. Locasto, Anna Shubina November 25, 2011 Abstract We present an approach to improving the security of complex, composed systems based on formal language theory, and show how this approach leads to advances in input validation, security modeling, attack surface reduction, and ultimately, software design and programming methodology. We cite examples based on real-world security flaws in common protocols representing different classes of protocol complexity. We also introduce a formalization of an exploit development technique, the parse tree differential attack, made possible by our conception of the role of formal grammars in security. These insights make possible future advances in software auditing techniques applicable to static and dynamic binary analysis, fuzzing, and general reverse-engineering and exploit development. -

The Machine That Builds Itself: How the Strengths of Lisp Family
Khomtchouk et al. OPINION NOTE The Machine that Builds Itself: How the Strengths of Lisp Family Languages Facilitate Building Complex and Flexible Bioinformatic Models Bohdan B. Khomtchouk1*, Edmund Weitz2 and Claes Wahlestedt1 *Correspondence: [email protected] Abstract 1Center for Therapeutic Innovation and Department of We address the need for expanding the presence of the Lisp family of Psychiatry and Behavioral programming languages in bioinformatics and computational biology research. Sciences, University of Miami Languages of this family, like Common Lisp, Scheme, or Clojure, facilitate the Miller School of Medicine, 1120 NW 14th ST, Miami, FL, USA creation of powerful and flexible software models that are required for complex 33136 and rapidly evolving domains like biology. We will point out several important key Full list of author information is features that distinguish languages of the Lisp family from other programming available at the end of the article languages and we will explain how these features can aid researchers in becoming more productive and creating better code. We will also show how these features make these languages ideal tools for artificial intelligence and machine learning applications. We will specifically stress the advantages of domain-specific languages (DSL): languages which are specialized to a particular area and thus not only facilitate easier research problem formulation, but also aid in the establishment of standards and best programming practices as applied to the specific research field at hand. DSLs are particularly easy to build in Common Lisp, the most comprehensive Lisp dialect, which is commonly referred to as the “programmable programming language.” We are convinced that Lisp grants programmers unprecedented power to build increasingly sophisticated artificial intelligence systems that may ultimately transform machine learning and AI research in bioinformatics and computational biology. -

Turing's Influence on Programming — Book Extract from “The Dawn of Software Engineering: from Turing to Dijkstra”
Turing's Influence on Programming | Book extract from \The Dawn of Software Engineering: from Turing to Dijkstra" Edgar G. Daylight∗ Eindhoven University of Technology, The Netherlands [email protected] Abstract Turing's involvement with computer building was popularized in the 1970s and later. Most notable are the books by Brian Randell (1973), Andrew Hodges (1983), and Martin Davis (2000). A central question is whether John von Neumann was influenced by Turing's 1936 paper when he helped build the EDVAC machine, even though he never cited Turing's work. This question remains unsettled up till this day. As remarked by Charles Petzold, one standard history barely mentions Turing, while the other, written by a logician, makes Turing a key player. Contrast these observations then with the fact that Turing's 1936 paper was cited and heavily discussed in 1959 among computer programmers. In 1966, the first Turing award was given to a programmer, not a computer builder, as were several subsequent Turing awards. An historical investigation of Turing's influence on computing, presented here, shows that Turing's 1936 notion of universality became increasingly relevant among programmers during the 1950s. The central thesis of this paper states that Turing's in- fluence was felt more in programming after his death than in computer building during the 1940s. 1 Introduction Many people today are led to believe that Turing is the father of the computer, the father of our digital society, as also the following praise for Martin Davis's bestseller The Universal Computer: The Road from Leibniz to Turing1 suggests: At last, a book about the origin of the computer that goes to the heart of the story: the human struggle for logic and truth. -

Compiler Error Messages Considered Unhelpful: the Landscape of Text-Based Programming Error Message Research
Working Group Report ITiCSE-WGR ’19, July 15–17, 2019, Aberdeen, Scotland Uk Compiler Error Messages Considered Unhelpful: The Landscape of Text-Based Programming Error Message Research Brett A. Becker∗ Paul Denny∗ Raymond Pettit∗ University College Dublin University of Auckland University of Virginia Dublin, Ireland Auckland, New Zealand Charlottesville, Virginia, USA [email protected] [email protected] [email protected] Durell Bouchard Dennis J. Bouvier Brian Harrington Roanoke College Southern Illinois University Edwardsville University of Toronto Scarborough Roanoke, Virgina, USA Edwardsville, Illinois, USA Scarborough, Ontario, Canada [email protected] [email protected] [email protected] Amir Kamil Amey Karkare Chris McDonald University of Michigan Indian Institute of Technology Kanpur University of Western Australia Ann Arbor, Michigan, USA Kanpur, India Perth, Australia [email protected] [email protected] [email protected] Peter-Michael Osera Janice L. Pearce James Prather Grinnell College Berea College Abilene Christian University Grinnell, Iowa, USA Berea, Kentucky, USA Abilene, Texas, USA [email protected] [email protected] [email protected] ABSTRACT of evidence supporting each one (historical, anecdotal, and empiri- Diagnostic messages generated by compilers and interpreters such cal). This work can serve as a starting point for those who wish to as syntax error messages have been researched for over half of a conduct research on compiler error messages, runtime errors, and century. Unfortunately, these messages which include error, warn- warnings. We also make the bibtex file of our 300+ reference corpus ing, and run-time messages, present substantial difficulty and could publicly available. -

INTRODUCTION to PL/1 PL/I Is a Structured Language to Develop Systems and Applications Programs (Both Business and Scientific)
INTRODUCTION TO PL/1 PL/I is a structured language to develop systems and applications programs (both business and scientific). Significant features : v Allows Free format v Regards a program as a continuous stream of data v Supports subprogram and functions v Uses defaults 1 Created by Sanjay Sinha Building blocks of PL/I : v Made up of a series of subprograms and called Procedure v Program is structured into a MAIN program and subprograms. v Subprograms include subroutine and functions. Every PL/I program consists of : v At least one Procedure v Blocks v Group 2 Created by Sanjay Sinha v There must be one and only one MAIN procedure to every program, the MAIN procedure statement consists of : v Label v The statement ‘PROCEDURE OPTIONS (MAIN)’ v A semicolon to mark the end of the statement. Coding a Program : 1. Comment line(s) begins with /* and ends with */. Although comments may be embedded within a PL/I statements , but it is recommended to keep the embedded comments minimum. 3 Created by Sanjay Sinha 2. The first PL/I statement in the program is the PROCEDURE statement : AVERAGE : PROC[EDURE] OPTIONS(MAIN); AVERAGE -- it is the name of the program(label) and compulsory and marks the beginning of a program. OPTIONS(MAIN) -- compulsory for main programs and if not specified , then the program is a subroutine. A PL/I program is compiled by PL/I compiler and converted into the binary , Object program file for link editing . 4 Created by Sanjay Sinha Advantages of PL/I are : 1. Better integration of sets of programs covering several applications.