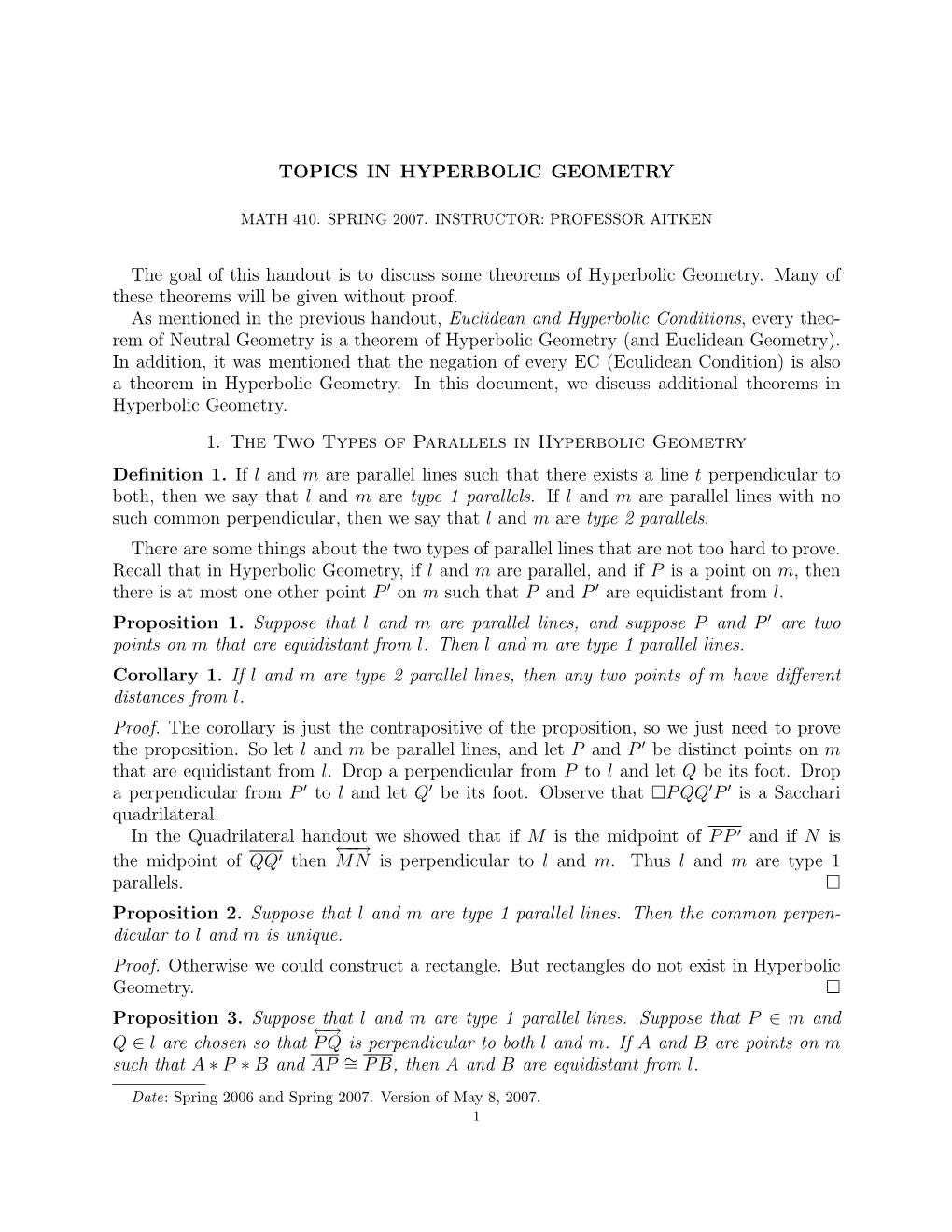
TOPICS in HYPERBOLIC GEOMETRY the Goal of This
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Point of Concurrency the Three Perpendicular Bisectors of a Triangle Intersect at a Single Point
3.1 Special Segments and Centers of Classifications of Triangles: Triangles By Side: 1. Equilateral: A triangle with three I CAN... congruent sides. Define and recognize perpendicular bisectors, angle bisectors, medians, 2. Isosceles: A triangle with at least and altitudes. two congruent sides. 3. Scalene: A triangle with three sides Define and recognize points of having different lengths. (no sides are concurrency. congruent) Jul 249:36 AM Jul 249:36 AM Classifications of Triangles: Special Segments and Centers in Triangles By angle A Perpendicular Bisector is a segment or line 1. Acute: A triangle with three acute that passes through the midpoint of a side and angles. is perpendicular to that side. 2. Obtuse: A triangle with one obtuse angle. 3. Right: A triangle with one right angle 4. Equiangular: A triangle with three congruent angles Jul 249:36 AM Jul 249:36 AM Point of Concurrency The three perpendicular bisectors of a triangle intersect at a single point. Two lines intersect at a point. The point of When three or more lines intersect at the concurrency of the same point, it is called a "Point of perpendicular Concurrency." bisectors is called the circumcenter. Jul 249:36 AM Jul 249:36 AM 1 Circumcenter Properties An angle bisector is a segment that divides 1. The circumcenter is an angle into two congruent angles. the center of the circumscribed circle. BD is an angle bisector. 2. The circumcenter is equidistant to each of the triangles vertices. m∠ABD= m∠DBC Jul 249:36 AM Jul 249:36 AM The three angle bisectors of a triangle Incenter properties intersect at a single point. -

Lesson 3: Rectangles Inscribed in Circles
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 3 M5 GEOMETRY Lesson 3: Rectangles Inscribed in Circles Student Outcomes . Inscribe a rectangle in a circle. Understand the symmetries of inscribed rectangles across a diameter. Lesson Notes Have students use a compass and straightedge to locate the center of the circle provided. If necessary, remind students of their work in Module 1 on constructing a perpendicular to a segment and of their work in Lesson 1 in this module on Thales’ theorem. Standards addressed with this lesson are G-C.A.2 and G-C.A.3. Students should be made aware that figures are not drawn to scale. Classwork Scaffolding: Opening Exercise (9 minutes) Display steps to construct a perpendicular line at a point. Students follow the steps provided and use a compass and straightedge to find the center of a circle. This exercise reminds students about constructions previously . Draw a segment through the studied that are needed in this lesson and later in this module. point, and, using a compass, mark a point equidistant on Opening Exercise each side of the point. Using only a compass and straightedge, find the location of the center of the circle below. Label the endpoints of the Follow the steps provided. segment 퐴 and 퐵. Draw chord 푨푩̅̅̅̅. Draw circle 퐴 with center 퐴 . Construct a chord perpendicular to 푨푩̅̅̅̅ at and radius ̅퐴퐵̅̅̅. endpoint 푩. Draw circle 퐵 with center 퐵 . Mark the point of intersection of the perpendicular chord and the circle as point and radius ̅퐵퐴̅̅̅. 푪. Label the points of intersection . -

Regents Exam Questions G.GPE.A.2: Locus 1 Name: ______
Regents Exam Questions G.GPE.A.2: Locus 1 Name: ________________________ www.jmap.org G.GPE.A.2: Locus 1 1 If point P lies on line , which diagram represents 3 The locus of points equidistant from two sides of the locus of points 3 centimeters from point P? an acute scalene triangle is 1) an angle bisector 2) an altitude 3) a median 4) the third side 1) 4 Chantrice is pulling a wagon along a smooth, horizontal street. The path of the center of one of the wagon wheels is best described as 1) a circle 2) 2) a line perpendicular to the road 3) a line parallel to the road 4) two parallel lines 3) 5 Which equation represents the locus of points 4 units from the origin? 1) x = 4 2 2 4) 2) x + y = 4 3) x + y = 16 4) x 2 + y 2 = 16 2 In the accompanying diagram, line 1 is parallel to line 2 . 6 Which equation represents the locus of all points 5 units below the x-axis? 1) x = −5 2) x = 5 3) y = −5 4) y = 5 Which term describes the locus of all points that are equidistant from line 1 and line 2 ? 1) line 2) circle 3) point 4) rectangle 1 Regents Exam Questions G.GPE.A.2: Locus 1 Name: ________________________ www.jmap.org 7 The locus of points equidistant from the points 9 Dan is sketching a map of the location of his house (4,−5) and (4,7) is the line whose equation is and his friend Matthew's house on a set of 1) y = 1 coordinate axes. -

Chapter 14 Locus and Construction
14365C14.pgs 7/10/07 9:59 AM Page 604 CHAPTER 14 LOCUS AND CONSTRUCTION Classical Greek construction problems limit the solution of the problem to the use of two instruments: CHAPTER TABLE OF CONTENTS the straightedge and the compass.There are three con- struction problems that have challenged mathematicians 14-1 Constructing Parallel Lines through the centuries and have been proved impossible: 14-2 The Meaning of Locus the duplication of the cube 14-3 Five Fundamental Loci the trisection of an angle 14-4 Points at a Fixed Distance in the squaring of the circle Coordinate Geometry The duplication of the cube requires that a cube be 14-5 Equidistant Lines in constructed that is equal in volume to twice that of a Coordinate Geometry given cube. The origin of this problem has many ver- 14-6 Points Equidistant from a sions. For example, it is said to stem from an attempt Point and a Line at Delos to appease the god Apollo by doubling the Chapter Summary size of the altar dedicated to Apollo. Vocabulary The trisection of an angle, separating the angle into Review Exercises three congruent parts using only a straightedge and Cumulative Review compass, has intrigued mathematicians through the ages. The squaring of the circle means constructing a square equal in area to the area of a circle. This is equivalent to constructing a line segment whose length is equal to p times the radius of the circle. ! Although solutions to these problems have been presented using other instruments, solutions using only straightedge and compass have been proven to be impossible. -

Equidistant Sets and Their Connectivity Properties
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 47, Number 2, February 1975 EQUIDISTANT SETS AND THEIR CONNECTIVITY PROPERTIES J. B. WILKER ABSTRACT. If A and B are nonvoid subsets of a metric space (X, d), the set of points x e X for which d(x, A) = d(x, B) is called the equidistant set determined by A and B. Among other results, it is shown that if A and B are connected and X is Euclidean 22-space, then the equidistant set determined by A and B is connected. 1. Introduction. In the Euclidean plane the set of points equidistant from two distinct points is a line, and the set of points equidistant from a line and a point not on it is a parabola. It is less well known that ellipses and single branches of hyperbolae admit analogous definitions. The set of points equidistant from two nested circles is an ellipse with foci at their centres. The set of points equidistant from two dis joint disks of different sizes is that branch of an hyperbola with foci at their centres which opens around the smaller disk. These classical examples prompt us to inquire further about the properties of sets which can be realised as equidistant sets. The most general context in which this study is meaningful is that of a metric space (X, d). If A is a nonvoid subset of A', and x is a point of X, then the distance from x to A is defined to be dix, A) = inf\dix, a): a £ A \. If A and B are both nonvoid subsets of X then the equidistant set determined by A and ß is defined to be U = r5| = {x: dix, A) = dix, B)\. -

Chapter 11 Symmetry-Breaking and the Contextual Emergence Of
September 17, 2015 18:39 World Scientific Review Volume - 9in x 6in ContextualityBook page 229 Chapter 11 Symmetry-Breaking and the Contextual Emergence of Human Multiagent Coordination and Social Activity Michael J. Richardson∗ and Rachel W. Kallen University of Cincinnati, USA Here we review a range of interpersonal and multiagent phenomena that demonstrate how the formal and conceptual principles of symmetry, and spontaneous and explicit symmetry-breaking, can be employed to inves- tigate, understand, and model the lawful dynamics that underlie self- organized social action and behavioral coordination. In doing so, we provided a brief introduction to group theory and discuss how symme- try groups can be used to predict and explain the patterns of multiagent coordination that are possible within a given task context. Finally, we ar- gue that the theoretical principles of symmetry and symmetry-breaking provide an ideal and highly generalizable framework for understanding the behavioral order that characterizes everyday social activity. 1. Introduction \. it is asymmetry that creates phenomena." (English translation) Pierre Curie (1894) \When certain effects show a certain asymmetry, this asymme- try must be found in the causes which gave rise to it." (English translation) Pierre Curie (1894) Human behavior is inherently social. From navigating a crowed side- walk, to clearing a dinner table with family members, to playing a compet- itive sports game like tennis or rugby, how we move and act during these social contexts is influenced by the behavior of those around us. The aim of this chapter is to propose a general theory for how we might understand ∗[email protected] 229 September 17, 2015 18:39 World Scientific Review Volume - 9in x 6in ContextualityBook page 230 230 Michael J. -

Almost-Equidistant Sets LSE Research Online URL for This Paper: Version: Published Version
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by LSE Research Online Almost-equidistant sets LSE Research Online URL for this paper: http://eprints.lse.ac.uk/103533/ Version: Published Version Article: Balko, Martin, Por, Attila, Scheucher, Manfred, Swanepoel, Konrad ORCID: 0000- 0002-1668-887X and Valtr, Pavel (2020) Almost-equidistant sets. Graphs and Combinatorics. ISSN 0911-0119 https://doi.org/10.1007/s00373-020-02149-w Reuse This article is distributed under the terms of the Creative Commons Attribution (CC BY) licence. This licence allows you to distribute, remix, tweak, and build upon the work, even commercially, as long as you credit the authors for the original work. More information and the full terms of the licence here: https://creativecommons.org/licenses/ [email protected] https://eprints.lse.ac.uk/ Graphs and Combinatorics https://doi.org/10.1007/s00373-020-02149-w(0123456789().,-volV)(0123456789().,-volV) ORIGINAL PAPER Almost-Equidistant Sets Martin Balko1,2 • Attila Po´ r3 • Manfred Scheucher4 • Konrad Swanepoel5 • Pavel Valtr1 Received: 23 April 2019 / Revised: 7 February 2020 Ó The Author(s) 2020 Abstract For a positive integer d, a set of points in d-dimensional Euclidean space is called almost-equidistant if for any three points from the set, some two are at unit distance. Let f(d) denote the largest size of an almost-equidistant set in d-space. It is known that f 2 7, f 3 10, and that the extremal almost-equidistant sets are unique. We giveð Þ¼ independent,ð Þ¼ computer-assisted proofs of these statements. -

Almost-Equidistant Sets∗
Almost-equidistant sets∗ Martin Balko Department of Applied Mathematics and Institute for Theoretical Computer Science, Faculty of Mathematics and Physics, Charles University, Prague, Czech Republic [email protected] Department of Computer Science, Faculty of Natural Sciences, Ben-Gurion University of the Negev, Beer Sheva, Israel Attila Pór Manfred Scheucher Department of Mathematics, Institut für Mathematik, Western Kentucky University, Technische Universität Berlin, Bowling Green, KY 42101 Germany [email protected] [email protected] Konrad Swanepoel Department of Mathematics, London School of Economics and Political Science, London, United Kingdom [email protected] Pavel Valtr Department of Applied Mathematics and Institute for Theoretical Computer Science, Faculty of Mathematics and Physics, Charles University, Prague, Czech Republic Abstract For a positive integer d, a set of points in d-dimensional Euclidean space is called almost-equidistant if for any three points from the set, some two are at unit distance. Let f(d) denote the largest size of an almost-equidistant set in d-space. It is known that f(2) = 7, f(3) = 10, and that the extremal almost-equidistant sets are unique. We give independent, computer-assisted proofs of these statements. It is also known that f(5) ≥ 16. We further show that 12 ≤ f(4) ≤ 13, f(5) ≤ 20, 18 ≤ f(6) ≤ 26, 20 ≤ f(7) ≤ 34, and f(9) ≥ f(8) ≥ 24. Up to dimension 7, our arXiv:1706.06375v3 [math.MG] 22 Feb 2020 work is based on various computer searches, and in dimensions 6 to 9, we give constructions based on the known construction for d = 5. -

On Convex Closed Planar Curves As Equidistant Sets
On convex closed planar curves as equidistant sets Csaba Vincze Institute of Mathematics, University of Debrecen, P.O.Box 400, H-4002 Debrecen, Hungary [email protected] February 13, 2018 Abstract The equidistant set of two nonempty subsets K and L in the Euclidean plane is a set all of whose points have the same distance from K and L. Since the classical conics can be also given in this way, equidistant sets can be considered as a kind of their generalizations: K and L are called the focal sets. In their paper [5] the authors posed the problem of the characterization of closed subsets in the Euclidean plane that can be realized as the equidistant set of two connected disjoint closed sets. We prove that any convex closed planar curve can be given as an equidistant set, i.e. the set of equidistant curves contains the entire class of convex closed planar curves. In this sense the equidistancy is a generalization of the convexity. 1 Introduction. Let K ⊂ R2 be a subset in the Euclidean coordinate plane. The distance between a point X ∈ R2 and K is measured by the usual infimum formula: d(X,K) := inf{d(X, A) | A ∈ K}, where d(X, A) is the Euclidean distance of the point X and A running through the elements of K. Let us define the equidistant set of K and L ⊂ R2 as the set all of whose points have the same distance from K and L: {K = L} := {X ∈ R2 | d(X,K)= d(X,L)}. -

An Analogue of Ptolemy's Theorem and Its Converse in Hyperbolic Geometry
Pacific Journal of Mathematics AN ANALOGUE OF PTOLEMY’S THEOREM AND ITS CONVERSE IN HYPERBOLIC GEOMETRY JOSEPH EARL VALENTINE Vol. 34, No. 3 July 1970 PACIFIC JOURNAL OF MATHEMATICS Vol. 34, No. 3, 1970 AN ANALOGUE OF PTOLEMY'S THEOREM AND ITS CONVERSE IN HYPERBOLIC GEOMETRY JOSEPH E. VALENTINE The purpose of this paper is to give a complete answer to the question: what relations between the mutual distances of n (n ^ 3) points in the hyperbolic plane are necessary and sufficient to insure that those points lie on a line, circle, horocycle, or one branch of an equidistant curve, res- pectively ? In 1912 Kubota [6] proved an analogue of Ptolemy's Theorem in the hyperbolic plane and recently Kurnick and Volenic [7] obtained another analogue. In 1947 Haantjes [4] gave a proof of the hyper- bolic analogue of the ptolemaic inequality, and in [5] he developed techniques which give a new proof of Ptolemy's Theorem and its converse in the euclidean plane. In the latter paper it is further stated that these techniques give proofs of an analogue of Ptolemy's Theorem and its converse in the hyperbolic plane. However, Haantjes' analogue of the converse of Ptolemy's Theorem is false, since Kubota [6] has shown that the determinant | smh\PiPs/2) |, where i, j = 1, 2, 3, 4, vanishes for four points P19 P2, P3, P4 on a horocycle in the hyperbolic plane. So far as the author knows, Haantjes is the only person who has mentioned an analogue of the converse of Ptolemy's Theorem in the hyperbolic plane. -
Hyperbolic Geometry with and Without Models
Eastern Illinois University The Keep Masters Theses Student Theses & Publications 2015 Hyperbolic Geometry With and Without Models Chad Kelterborn Eastern Illinois University This research is a product of the graduate program in Mathematics and Computer Science at Eastern Illinois University. Find out more about the program. Recommended Citation Kelterborn, Chad, "Hyperbolic Geometry With and Without Models" (2015). Masters Theses. 2325. https://thekeep.eiu.edu/theses/2325 This is brought to you for free and open access by the Student Theses & Publications at The Keep. It has been accepted for inclusion in Masters Theses by an authorized administrator of The Keep. For more information, please contact [email protected]. The Graduate School~ EASTERN ILLINOIS UNIVERSITY'" Thesis Maintenance and Reproduction Certificate FOR: Graduate Candidates Completing Theses in Partial Fulfillment of the Degree Graduate Faculty Advisors Directing the Theses RE: Preservation, Reproduction, and Distribution of Thesis Research Preserving, reproducing, and distributing thesis research is an important part of Booth Library's responsibility to provide access to scholarship. In order to further this goal, Booth Library makes all graduate theses completed as part of a degree program at Eastern Illinois University available for personal study, research, and other not-for-profit educational purposes. Under 17 U.S.C. § 108, the library may reproduce and distribute a copy without infringing on copyright; however, professional courtesy dictates that permission be requested from the author before doing so. Your signatures affirm the following: • The graduate candidate is the author of this thesis. • The graduate candidate retains the copyright and intellectual property rights associated with the original research, creative activity, and intellectual or artistic content of the thesis. -

Isometries of the Hyperbolic Plane Equidistant Curves
Durham University Epiphany 2019 Pavel Tumarkin Geometry III/IV, Homework: weeks 17{18 Due date for starred problems: Tuesday, March 19. Isometries of the hyperbolic plane 17.1. Show that any pair of parallel lines can be transformed to any other pair of parallel lines by an isometry. 17.2. Let A; B 2 γ be two points on a horocycle γ. Show that the perpendicular bisector to the segment AB (of a hyperbolic line!) is orthogonal to γ. 17.3. Let f be a composition of three reflections. Show that f is a glide reflection, i.e. a hyperbolic translation along some line composed with a reflection with respect to the same line. 17.4. (?) Let f be an isometry of the hyperbolic plane such that the distance from A to f(A) is the same 2 for all points A 2 H . Show that f is an identity map. 17.5. (?) Let a and b be two vectors in the hyperboloid model such that (a; a) > 0 and (b; b) > 0. Let la and lb be the lines determined by equations (x; a) = 0 and (x; b) = 0 respectively, and let ra and rb be the reflections with respect to la and lb. (a) For a = (0; 1; 0) and b = (1; 0; 0) write down ra and rb. Find rb ◦ ra(v), where v = (0; 1; 2). (b) What is the type of the isometry ' = rb ◦ ra for a = (1; 1; 1) and b = (1; 1; −1)? (Hint: you don't need to compute ra and rb).