Hyperbolic Geometry: a Guide to Models and Motion Danielle J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. Grieser Name: Date
Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. Grieser Name: ________________________________________ Date: ______________ Block: ________ Identifying Pairs of Lines and Angles Lines that intersect are coplanar Lines that do not intersect o are parallel (coplanar) OR o are skew (not coplanar) In the figure, name: o intersecting lines:___________ o parallel lines:_______________ o skew lines:________________ o parallel planes:_____________ Example: Think of each segment in the figure as part of a line. Find: Line(s) parallel to CD and containing point A _________ Line(s) skew to and containing point A _________ Line(s) perpendicular to and containing point A _________ Plane(s) parallel to plane EFG and containing point A _________ Parallel and Perpendicular Lines If two lines are in the same plane, then they are either parallel or intersect a point. There exist how many lines through a point not on a line? __________ Only __________ of them is parallel to the line. Parallel Postulate If there is a line and a point not on a line, then there is exactly one line through the point parallel to the given line. Perpendicular Postulate If there is a line and a point not on a line, then there is exactly one line through the point parallel to the given line. Angles and Transversals Interior angles are on the INSIDE of the two lines Exterior angles are on the OUTSIDE of the two lines Alternate angles are on EITHER SIDE of the transversal Consecutive angles are on the SAME SIDE of the transversal Corresponding angles are in the same position on each of the two lines Alternate interior angles lie on either side of the transversal inside the two lines Alternate exterior angles lie on either side of the transversal outside the two lines Consecutive interior angles lie on the same side of the transversal inside the two lines (same side interior) Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. -

Proofs with Perpendicular Lines
3.4 Proofs with Perpendicular Lines EEssentialssential QQuestionuestion What conjectures can you make about perpendicular lines? Writing Conjectures Work with a partner. Fold a piece of paper D in half twice. Label points on the two creases, as shown. a. Write a conjecture about AB— and CD — . Justify your conjecture. b. Write a conjecture about AO— and OB — . AOB Justify your conjecture. C Exploring a Segment Bisector Work with a partner. Fold and crease a piece A of paper, as shown. Label the ends of the crease as A and B. a. Fold the paper again so that point A coincides with point B. Crease the paper on that fold. b. Unfold the paper and examine the four angles formed by the two creases. What can you conclude about the four angles? B Writing a Conjecture CONSTRUCTING Work with a partner. VIABLE a. Draw AB — , as shown. A ARGUMENTS b. Draw an arc with center A on each To be prof cient in math, side of AB — . Using the same compass you need to make setting, draw an arc with center B conjectures and build a on each side of AB— . Label the C O D logical progression of intersections of the arcs C and D. statements to explore the c. Draw CD — . Label its intersection truth of your conjectures. — with AB as O. Write a conjecture B about the resulting diagram. Justify your conjecture. CCommunicateommunicate YourYour AnswerAnswer 4. What conjectures can you make about perpendicular lines? 5. In Exploration 3, f nd AO and OB when AB = 4 units. -

Five-Dimensional Design
PERIODICA POLYTECHNICA SER. CIV. ENG. VOL. 50, NO. 1, PP. 35–41 (2006) FIVE-DIMENSIONAL DESIGN Elek TÓTH Department of Building Constructions Budapest University of Technology and Economics H–1521 Budapest, POB. 91. Hungary Received: April 3 2006 Abstract The method architectural and engineering design and construction apply for two-dimensional rep- resentation is geometry, the axioms of which were first outlined by Euclid. The proposition of his 5th postulate started on its course a problem of geometry that provoked perhaps the most mistaken demonstrations and that remained unresolved for two thousand years, the question if the axiom of parallels can be proved. The quest for the solution of this problem led Bolyai János to revolutionary conclusions in the wake of which he began to lay the foundations of a new (absolute) geometry in the system of which planes bend and become hyperbolic. It was Einstein’s relativity theory that eventually created the possibility of the recognition of new dimensions by discussing space as well as a curved, non-linear entity. Architectural creations exist in what Kant termed the dual form of intuition, that is in time and space, thus in four dimensions. In this context the fourth dimension is to be interpreted as the current time that may be actively experienced. On the other hand there has been a dichotomy in the concept of time since ancient times. The introduction of a time-concept into the activity of the architectural designer that comprises duration, the passage of time and cyclic time opens up a so-far unknown new direction, a fifth dimension, the perfection of which may be achieved through the comprehension and the synthesis of the coded messages of building diagnostics and building reconstruction. -

Point of Concurrency the Three Perpendicular Bisectors of a Triangle Intersect at a Single Point
3.1 Special Segments and Centers of Classifications of Triangles: Triangles By Side: 1. Equilateral: A triangle with three I CAN... congruent sides. Define and recognize perpendicular bisectors, angle bisectors, medians, 2. Isosceles: A triangle with at least and altitudes. two congruent sides. 3. Scalene: A triangle with three sides Define and recognize points of having different lengths. (no sides are concurrency. congruent) Jul 249:36 AM Jul 249:36 AM Classifications of Triangles: Special Segments and Centers in Triangles By angle A Perpendicular Bisector is a segment or line 1. Acute: A triangle with three acute that passes through the midpoint of a side and angles. is perpendicular to that side. 2. Obtuse: A triangle with one obtuse angle. 3. Right: A triangle with one right angle 4. Equiangular: A triangle with three congruent angles Jul 249:36 AM Jul 249:36 AM Point of Concurrency The three perpendicular bisectors of a triangle intersect at a single point. Two lines intersect at a point. The point of When three or more lines intersect at the concurrency of the same point, it is called a "Point of perpendicular Concurrency." bisectors is called the circumcenter. Jul 249:36 AM Jul 249:36 AM 1 Circumcenter Properties An angle bisector is a segment that divides 1. The circumcenter is an angle into two congruent angles. the center of the circumscribed circle. BD is an angle bisector. 2. The circumcenter is equidistant to each of the triangles vertices. m∠ABD= m∠DBC Jul 249:36 AM Jul 249:36 AM The three angle bisectors of a triangle Incenter properties intersect at a single point. -

Lesson 3: Rectangles Inscribed in Circles
NYS COMMON CORE MATHEMATICS CURRICULUM Lesson 3 M5 GEOMETRY Lesson 3: Rectangles Inscribed in Circles Student Outcomes . Inscribe a rectangle in a circle. Understand the symmetries of inscribed rectangles across a diameter. Lesson Notes Have students use a compass and straightedge to locate the center of the circle provided. If necessary, remind students of their work in Module 1 on constructing a perpendicular to a segment and of their work in Lesson 1 in this module on Thales’ theorem. Standards addressed with this lesson are G-C.A.2 and G-C.A.3. Students should be made aware that figures are not drawn to scale. Classwork Scaffolding: Opening Exercise (9 minutes) Display steps to construct a perpendicular line at a point. Students follow the steps provided and use a compass and straightedge to find the center of a circle. This exercise reminds students about constructions previously . Draw a segment through the studied that are needed in this lesson and later in this module. point, and, using a compass, mark a point equidistant on Opening Exercise each side of the point. Using only a compass and straightedge, find the location of the center of the circle below. Label the endpoints of the Follow the steps provided. segment 퐴 and 퐵. Draw chord 푨푩̅̅̅̅. Draw circle 퐴 with center 퐴 . Construct a chord perpendicular to 푨푩̅̅̅̅ at and radius ̅퐴퐵̅̅̅. endpoint 푩. Draw circle 퐵 with center 퐵 . Mark the point of intersection of the perpendicular chord and the circle as point and radius ̅퐵퐴̅̅̅. 푪. Label the points of intersection . -

Regents Exam Questions G.GPE.A.2: Locus 1 Name: ______
Regents Exam Questions G.GPE.A.2: Locus 1 Name: ________________________ www.jmap.org G.GPE.A.2: Locus 1 1 If point P lies on line , which diagram represents 3 The locus of points equidistant from two sides of the locus of points 3 centimeters from point P? an acute scalene triangle is 1) an angle bisector 2) an altitude 3) a median 4) the third side 1) 4 Chantrice is pulling a wagon along a smooth, horizontal street. The path of the center of one of the wagon wheels is best described as 1) a circle 2) 2) a line perpendicular to the road 3) a line parallel to the road 4) two parallel lines 3) 5 Which equation represents the locus of points 4 units from the origin? 1) x = 4 2 2 4) 2) x + y = 4 3) x + y = 16 4) x 2 + y 2 = 16 2 In the accompanying diagram, line 1 is parallel to line 2 . 6 Which equation represents the locus of all points 5 units below the x-axis? 1) x = −5 2) x = 5 3) y = −5 4) y = 5 Which term describes the locus of all points that are equidistant from line 1 and line 2 ? 1) line 2) circle 3) point 4) rectangle 1 Regents Exam Questions G.GPE.A.2: Locus 1 Name: ________________________ www.jmap.org 7 The locus of points equidistant from the points 9 Dan is sketching a map of the location of his house (4,−5) and (4,7) is the line whose equation is and his friend Matthew's house on a set of 1) y = 1 coordinate axes. -
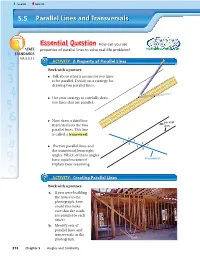
Parallel Lines and Transversals
5.5 Parallel Lines and Transversals How can you use STATES properties of parallel lines to solve real-life problems? STANDARDS MA.8.G.2.2 1 ACTIVITY: A Property of Parallel Lines Work with a partner. ● Talk about what it means for two lines 12 1 cm 56789 to be parallel. Decide on a strategy for 1234 drawing two parallel lines. 01 91 8 9 9 9 9 10 11 12 13 10 10 10 10 ● Use your strategy to carefully draw 7 67 two lines that are parallel. 14 15 5 16 17 18 19 20 3421 22 23 2 24 25 26 1 ● Now, draw a third line 27 28 in. parallel that intersects the two 29 30 lines parallel lines. This line is called a transversal. 2 1 3 4 6 ● The two parallel lines and 5 7 8 the transversal form eight angles. Which of these angles have equal measures? transversal Explain your reasoning. 2 ACTIVITY: Creating Parallel Lines Work with a partner. a. If you were building the house in the photograph, how could you make sure that the studs are parallel to each other? b. Identify sets of parallel lines and transversals in the Studs photograph. 212 Chapter 5 Angles and Similarity 3 ACTIVITY: Indirect Measurement Work with a partner. F a. Use the fact that two rays from the Sun are parallel to explain why △ABC and △DEF are similar. b. Explain how to use similar triangles to fi nd the height of the fl agpole. x ft Sun’s ray C Sun’s ray 5 ft AB3 ft DE36 ft 4. -
Triangles and Transversals Triangles
Triangles and Transversals Triangles A three-sided polygon. Symbol → ▵ You name it ▵ ABC. Total Angle Sum of a Triangle The interior angles of a triangle add up to 180 degrees. Symbol = Acute Triangle A triangle that contains only angles that are less than 90 degrees. Obtuse Triangle A triangle with one angle greater than 90 degrees (an obtuse angle). Right Triangle A triangle with one right angle (90 degrees). Vertex The common endpoint of two or more rays or line segments. Complementary Angles Two angles whose measures have a sum of 90 degrees. Supplementary Angles Two angles whose measures have a sum of 180 degrees. Perpendicular Lines Lines that intersect to form a right angle (90 degrees). Symbol = Parallel Lines Lines that never intersect. Arrows are used to indicate lines are parallel. Symbol = || Transversal Lines A line that cuts across two or more (usually parallel) lines. Intersect The point where two lines meet or cross. Vertical Angles Angles opposite one another at the intersection of two lines. Vertical angles have the same angle measurements. Interior Angles An angle inside a shape. Exterior Angles Angles outside of a shape. Alternate Interior Angles The pairs of angles on opposite sides of the transversal but inside the two lines. Alternate Exterior Angles Each pair of these angles are outside the lines, and on opposite sides of the transversal. Corresponding Angles The angles in matching corners. Reflexive Angles An angle whose measure is greater than 180 degrees and less that 360 degrees. Straight Angles An angle that measures exactly 180 degrees. Adjacent Angles Angles with common side and common vertex without overlapping. -

Geometry Unit 4 Vocabulary Triangle Congruence
Geometry Unit 4 Vocabulary Triangle Congruence Biconditional statement – A is a statement that contains the phrase “if and only if.” Writing a biconditional statement is equivalent to writing a conditional statement and its converse. Congruence Transformations–transformations that preserve distance, therefore, creating congruent figures Congruence – the same shape and the same size Corresponding Parts of Congruent Triangles are Congruent CPCTC – the angle made by two lines with a common vertex. (When two lines meet at a common point Included angle (vertex) the angle between them is called the included angle. The two lines define the angle.) Included side – the common side of two legs. (Usually found in triangles and other polygons, the included side is the one that links two angles together. Think of it as being “included” between 2 angles. Overlapping triangles – triangles lying on top of one another sharing some but not all sides. Theorems AAS Congruence Theorem – Triangles are congruent if two pairs of corresponding angles and a pair of opposite sides are equal in both triangles. ASA Congruence Theorem -Triangles are congruent if any two angles and their included side are equal in both triangles. SAS Congruence Theorem -Triangles are congruent if any pair of corresponding sides and their included angles are equal in both triangles. SAS SSS Congruence Theorem -Triangles are congruent if all three sides in one triangle are congruent to the corresponding sides in the other. Special congruence theorem for RIGHT TRIANGLES! . -

A Congruence Problem for Polyhedra
A congruence problem for polyhedra Alexander Borisov, Mark Dickinson, Stuart Hastings April 18, 2007 Abstract It is well known that to determine a triangle up to congruence requires 3 measurements: three sides, two sides and the included angle, or one side and two angles. We consider various generalizations of this fact to two and three dimensions. In particular we consider the following question: given a convex polyhedron P , how many measurements are required to determine P up to congruence? We show that in general the answer is that the number of measurements required is equal to the number of edges of the polyhedron. However, for many polyhedra fewer measurements suffice; in the case of the cube we show that nine carefully chosen measurements are enough. We also prove a number of analogous results for planar polygons. In particular we describe a variety of quadrilaterals, including all rhombi and all rectangles, that can be determined up to congruence with only four measurements, and we prove the existence of n-gons requiring only n measurements. Finally, we show that one cannot do better: for any ordered set of n distinct points in the plane one needs at least n measurements to determine this set up to congruence. An appendix by David Allwright shows that the set of twelve face-diagonals of the cube fails to determine the cube up to conjugacy. Allwright gives a classification of all hexahedra with all face- diagonals of equal length. 1 Introduction We discuss a class of problems about the congruence or similarity of three dimensional polyhedra. -

Lecture 3: Geometry
E-320: Teaching Math with a Historical Perspective Oliver Knill, 2010-2015 Lecture 3: Geometry Geometry is the science of shape, size and symmetry. While arithmetic dealt with numerical structures, geometry deals with metric structures. Geometry is one of the oldest mathemati- cal disciplines and early geometry has relations with arithmetics: we have seen that that the implementation of a commutative multiplication on the natural numbers is rooted from an inter- pretation of n × m as an area of a shape that is invariant under rotational symmetry. Number systems built upon the natural numbers inherit this. Identities like the Pythagorean triples 32 +42 = 52 were interpreted geometrically. The right angle is the most "symmetric" angle apart from 0. Symmetry manifests itself in quantities which are invariant. Invariants are one the most central aspects of geometry. Felix Klein's Erlanger program uses symmetry to classify geome- tries depending on how large the symmetries of the shapes are. In this lecture, we look at a few results which can all be stated in terms of invariants. In the presentation as well as the worksheet part of this lecture, we will work us through smaller miracles like special points in triangles as well as a couple of gems: Pythagoras, Thales,Hippocrates, Feuerbach, Pappus, Morley, Butterfly which illustrate the importance of symmetry. Much of geometry is based on our ability to measure length, the distance between two points. A modern way to measure distance is to determine how long light needs to get from one point to the other. This geodesic distance generalizes to curved spaces like the sphere and is also a practical way to measure distances, for example with lasers. -
Feb 23 Notes: Definition: Two Lines L and M Are Parallel If They Lie in The
Feb 23 Notes: Definition: Two lines l and m are parallel if they lie in the same plane and do not intersect. Terminology: When one line intersects each of two given lines, we call that line a transversal. We define alternate interior angles, corresponding angles, alternate exterior angles, and interior angles on the same side of the transversal using various betweeness and half-plane notions. Suppose line l intersects lines m and n at points B and E, respectively, with points A and C on line m and points D and F on line n such that A-B-C and D-E-F, with A and D on the same side of l. Suppose also that G and H are points such that H-E-B- G. Then pABE and pBEF are alternate interior angles, as are pCBE and pDEB. pABG and pFEH are alternate exterior angles, as are pCBG and pDEH. pGBC and pBEF are a pair of corresponding angles, as are pGBA & pBED, pCBE & pFEH, and pABE & pDEH. pCBE and pFEB are interior angles on the same side of the transversal, as are pABE and pDEB. Our Last Theorem in Absolute Geometry: If two lines in the same plane are cut by a transversal so that a pair of alternate interior angles are congruent, the lines are parallel. Proof: Let l intersect lines m and n at points A and B respectively. Let p1 p2. Suppose m and n meet at point C. Then either p1 is exterior to ªABC, or p2 is exterior to ªABC. In the first case, the exterior angle inequality gives p1 > p2; in the second, it gives p2 > p1.