Chapter 2: String Figuring Robotic Knitting
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the Mechanics of the Bow and Arrow 1
On the Mechanics of the Bow and Arrow 1 B.W. Kooi Groningen, The Netherlands 1983 1B.W. Kooi, On the Mechanics of the Bow and Arrow PhD-thesis, Mathematisch Instituut, Rijksuniversiteit Groningen, The Netherlands (1983), Supported by ”Netherlands organization for the advancement of pure research” (Z.W.O.), project (63-57) 2 Contents 1 Introduction 5 1.1 Prefaceandsummary.............................. 5 1.2 Definitionsandclassifications . .. 7 1.3 Constructionofbowsandarrows . .. 11 1.4 Mathematicalmodelling . 14 1.5 Formermathematicalmodels . 17 1.6 Ourmathematicalmodel. 20 1.7 Unitsofmeasurement.............................. 22 1.8 Varietyinarchery................................ 23 1.9 Qualitycoefficients ............................... 25 1.10 Comparison of different mathematical models . ...... 26 1.11 Comparison of the mechanical performance . ....... 28 2 Static deformation of the bow 33 2.1 Summary .................................... 33 2.2 Introduction................................... 33 2.3 Formulationoftheproblem . 34 2.4 Numerical solution of the equation of equilibrium . ......... 37 2.5 Somenumericalresults . 40 2.6 A model of a bow with 100% shooting efficiency . .. 50 2.7 Acknowledgement................................ 52 3 Mechanics of the bow and arrow 55 3.1 Summary .................................... 55 3.2 Introduction................................... 55 3.3 Equationsofmotion .............................. 57 3.4 Finitedifferenceequations . .. 62 3.5 Somenumericalresults . 68 3.6 On the behaviour of the normal force -
Simply String Art Carol Beard Central Michigan University, [email protected]
International Textile and Apparel Association 2015: Celebrating the Unique (ITAA) Annual Conference Proceedings Nov 11th, 12:00 AM Simply String Art Carol Beard Central Michigan University, [email protected] Follow this and additional works at: https://lib.dr.iastate.edu/itaa_proceedings Part of the Fashion Design Commons Beard, Carol, "Simply String Art" (2015). International Textile and Apparel Association (ITAA) Annual Conference Proceedings. 74. https://lib.dr.iastate.edu/itaa_proceedings/2015/design/74 This Event is brought to you for free and open access by the Conferences and Symposia at Iowa State University Digital Repository. It has been accepted for inclusion in International Textile and Apparel Association (ITAA) Annual Conference Proceedings by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Santa Fe, New Mexico 2015 Proceedings Simply String Art Carol Beard, Central Michigan University, USA Key Words: String art, surface design Purpose: Simply String Art was inspired by an art piece at the Saint Louis Art Museum. I was intrigued by a painting where the artist had created a three dimensional effect with a string art application over highlighted areas of his painting. I wanted to apply this visual element to the surface of fabric used in apparel construction. The purpose of this piece was to explore string art as unique artistic interpretation for a surface design element. I have long been interested in intricate details that draw the eye and take something seemingly simple to the realm of elegance. Process: The design process began with a research of string art and its many interpretations. -

Youth Handicraft - 20
YOUTH HANDICRAFT - 20 Committee: Danielle Brannon, April Davis, Barry Davis, Kailey Hubert Premiums: $3.00, $2.00, $1.00 Premiums Offered: $645.00 4TH THROUGH 8TH GRADES 20-01-01-00 .............................................................................. Paper Craft 20-01-02-00 ..............................................................................Plaster Craft 20-01-03-00 .....................................................................Bread Dough Craft 20-01-04-00 ......................................................................... Sculpture, clay 20-01-05-00 .................................................................Wall Hangings, fabric 20-01-06-00 ..........................................................................Handmade Doll 20-01-07-00 .......................................Candle, molded, poured, hand-formed 20-01-08-00 ...........................................................................Candle Holder 20-01-09-00 .................................................................... Handmade Basket 20-01-10-00 ................................................................................. String Art 20-01-11-00 ............................................................................. Plastic Craft 20-01-12-00 ................................................................................Metal Craft 20-01-13-00 .............................................................................Leather Craft 20-01-14-00 ................................................................................. -
Radial Weavings
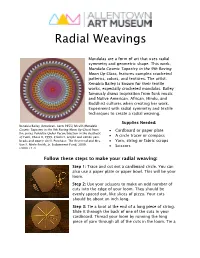
Radial Weavings Mandalas are a form of art that uses radial symmetry and geometric shape. This work, Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close, features complex crocheted patterns, colors, and textures. The artist, Xenobia Bailey is known for their textile works, especially crocheted mandalas. Bailey famously draws inspiration from funk music and Native American, African, Hindu, and Buddhist cultures when creating her work. Experiment with radial symmetry and textile techniques to create a radial weaving. Supplies Needed: Xenobia Bailey (American, born 1955) Mv:#9 (Mandala Cosmic Tapestry in the 9th Roving Moon Up-Close) from • Cardboard or paper plate the series Paradise Under Reconstruction in the Aesthetic of Funk, Phase II, 1999, Crochet, acrylic and cotton yarn, • A circle tracer or compass beads and cowrie shell. Purchase: The Reverend and Mrs. • Yarn, string or fabric scraps Van S. Merle-Smith, Jr. Endowment Fund, 2000. • Scissors (2000.17.2) Follow these steps to make your radial weaving: Step 1: Trace and cut out a cardboard circle. You can also use a paper plate or paper bowl. This will be your loom. Step 2: Use your scissors to make an odd number of cuts into the edge of your loom. They should be evenly spaced out, like slices of pizza. Your cuts should be about an inch long. Step 3: Tie a knot at the end of a long piece of string. Slide it through the back of one of the cuts in your cardboard. Thread your loom by running the long piece of yarn through all of the cuts in the loom. -

Bath Time Travellers Weaving
Bath Time Travellers Weaving Did you know? The Romans used wool, linen, cotton and sometimes silk for their clothing. Before the use of spinning wheels, spinning was carried out using a spindle and a whorl. The spindle or rod usually had a bump on which the whorl was fitted. The majority of the whorls were made of stone, lead or recycled pots. A wisp of prepared wool was twisted around the spindle, which was then spun and allowed to drop. The whorl acts to keep the spindle twisting and the weight stretches the fibres. By doing this, the fibres were extended and twisted into yarn. Weaving was probably invented much later than spinning around 6000 BC in West Asia. By Roman times weaving was usually done on upright looms. None of these have survived but fortunately we have pictures drawn at the time to show us what they looked like. A weaver who stood at a vertical loom could weave cloth of a greater width than was possible sitting down. This was important as a full sized toga could measure as much as 4-5 metres in length and 2.5 metres wide! Once the cloth had been produced it was soaked in decayed urine to remove the grease and make it ready for dying. Dyes came from natural materials. Most dyes came from sources near to where the Romans settled. The colours you wore in Roman times told people about you. If you were rich you could get rarer dyes with brighter colours from overseas. Activity 1 – Weave an Owl Hanging Have a close look at the Temple pediment. -

Job Description: Handicraft Director
Job Description: Handicraft Director Essential Functions: The Handicraft Director is responsible to the Program Director for the effective instruction of specialized craft skills and of any merit badges assigned by the Program Director. The Handicraft Director must possess organizational and managerial skills, creativity and originality, and a desire to work with youth of Boy Scout age. Setting up an area to which Scouts and Leaders may come for instruction in the following skills and their related merit badges: Training and supervising the work of the Handicraft Staff. Helping the Business Manager keep track of handicraft inventories in the Trading Post. When supplies of various craft items are running low in relation to expected need, the Director should bring this to the Business Managers attention. Making available and encouraging troops, patrols, and older Scouts to participate in special activities at the Handicraft area. Helping unit leaders to become aware of the Handicraft program possibilities available both in and out of Camp. Maintaining up-to-date and accurate inventories of all equipment used in the Handicraft program Ensuring the counselors-in-training assigned to the Handicraft area receive meaningful and relevant experiences. Turning in records of merit badge participation and badge completion to the Program Director. Assisting in the general Camp program in anyway possible, and completing any assignments given by the Program Director or the Camp Director. Working to maintain the morale of other Staff members assigned to the Handicraft area. Writing a report on the Handicraft Program, and turning it in to the Program Director before leaving Camp. This report should document the extent of use of the program and suggestions for improvements. -

Art and Life on the Upper M Is Sis Sippi 1890-1915
Minnesota 1900 Art and Life on the Upper M is sis sippi 1890-1915 MICHAEL CONFORTI, EDITOR With essays by Marcia G. Anderson, Michael Conforti and Jennifer Komar, Mark Hammons, Alan K. Lathrop, Louise Lincoln and Paulette Fairbanks Molin, and Thomas O'Sullivan ~ .DElAWARE Newark: University of Delaware Press London and Toronto: Associated University Presses in association with The Minneapolis Institute of Arts Appendixes APPENDIX I: BIOGRAPHIES OF PROMINENT MEMBERS OF THE HANDICRAFT GUILD OF MINNEAPOLIS . M ANY TALENTED WOMEN WERE E CAGED IN THE AP Suggestions, was published for the schools' drawing depart plied arts during this period only to abandon them to devote ments and gave monthly work outlines for teachers in all all their energies to husbands and families. So much of the grades. She identified useful instructional sources for teach work of consequence was carried out by professional ers. Ernest Batchelder's book, Design in Theory and Prac women. The stories below offer some hint of the commit tice, was always among them. Roberts also published a ment of these women and the inAuence they had both in series of booklets, tools really, called Picture Studies. Each Minnesota and nationally. focused on an individual artist (e.g., Murillo, Velasquez, and Rembrandt) with the purpose of preparing children for (MARY) EMMA ROBERTS beginning studies in painting as an art form. Emma Roberts, the founder of the Handicraft Guild, In 1913, Roberts moved into her new arts and crafts supervised drawing and art appreciation in the Minneapolis inAuenced home, designed and built by celebrated local public schools for twenty-four years. -

2008 Annual Town Report Is Dedicated to Colleen F
NEEDHAM Where Colonial Tradition ... MEETS … 21st Century Innovation T O W N O F N E E D H A M 1711 – 2008 ANNUAL REPORT Needham, Massachusetts Cover Photographs Jonathan Kingsbury House circa 1779, Rosemary Street, Needham, MA (top) Dasani Water Bottling, Coca Cola Plant, Needham, MA (bottom) This 2008 Annual Town Report is Dedicated to Colleen F. Schaller Colleen Schaller and her late husband Frank arrived in Needham in 1963, thinking they would be here only a few years. Born and raised in Connecticut, Colleen is a graduate of the Berkeley School in New York. She met Frank at her first job at Univac, where she was an assistant. They were married in 1961 and Frank’s profession as a mechanical engineer for Univac gave them the opportunity to live in four states in two years before they eventually settled in Needham. Over the next 46 years, Colleen and Frank raised two children and became grandparents four times. Colleen continues to live in this same home today. Colleen is a tireless volunteer and her efforts have benefited a long list of organizations within our community. Senior Center Exploratory Committee, Member Tercentennial Seniors Committee, Needham Board of Selectmen, Member Member/Vice Chair Needham Youth Commission, Member/Chair Needham Council on Aging Board of Directors, Needham School Committee, Member/Chair Member Needham Youth Center, Founding Member Needham Community Council Board of Directors, Member Needham High School Distinguished Career Charles River Center Board of Directors, Member Committee, Member Needham Cares, -

The Musical Kinetic Shape: a Variable Tension String Instrument
The Musical Kinetic Shape: AVariableTensionStringInstrument Ismet Handˇzi´c, Kyle B. Reed University of South Florida, Department of Mechanical Engineering, Tampa, Florida Abstract In this article we present a novel variable tension string instrument which relies on a kinetic shape to actively alter the tension of a fixed length taut string. We derived a mathematical model that relates the two-dimensional kinetic shape equation to the string’s physical and dynamic parameters. With this model we designed and constructed an automated instrument that is able to play frequencies within predicted and recognizable frequencies. This prototype instrument is also able to play programmed melodies. Keywords: musical instrument, variable tension, kinetic shape, string vibration 1. Introduction It is possible to vary the fundamental natural oscillation frequency of a taut and uniform string by either changing the string’s length, linear density, or tension. Most string musical instruments produce di↵erent tones by either altering string length (fretting) or playing preset and di↵erent string gages and string tensions. Although tension can be used to adjust the frequency of a string, it is typically only used in this way for fine tuning the preset tension needed to generate a specific note frequency. In this article, we present a novel string instrument concept that is able to continuously change the fundamental oscillation frequency of a plucked (or bowed) string by altering string tension in a controlled and predicted Email addresses: [email protected] (Ismet Handˇzi´c), [email protected] (Kyle B. Reed) URL: http://reedlab.eng.usf.edu/ () Preprint submitted to Applied Acoustics April 19, 2014 Figure 1: The musical kinetic shape variable tension string instrument prototype. -

VOGUEKNITTINGLIVE.COM SC HEDULE Thursday, October 23 Registration: 3 P.M
VOGU Eknitting CHICAGO THE ULTIMATE KNITTING EVENT OCTOBER 24 –26 ,2014 • PALMER HOUSE HILTON HOTEL PRINTABLE BROCHURE NEW& INSPIRATIONAL KNITWORTHY HAND KNITTING PRODUCTS CLASSES & LECTURES! VOGUEKNITTINGLIVE.COM SC HEDULE Thursday, October 23 Registration: 3 p.m. –7 p.m. OF EVENTS Classroom Hours: 6 p.m. –9 p.m. Friday, October 24 VOGUEknitting Registration: 8 a.m. –7:30 p.m. 3-hour Classroom Hours: 9 a.m.–12 p.m., 2 p.m.–5 p.m., 6 p.m. –9 p.m. 2-hour Classroom Hours: 9 a.m.–11 a.m., 2 p.m.–4 p.m. Marketplace: 5:00 p.m. –8:30 p.m. Please refer to VogueknittingLIVE.com for complete details. Saturday, October 25 HOTEL INFORMATION Registration: 8 a.m. –6:30 p.m. Vogue Knitting LIVE will be held in 3-hour Classroom Hours: 9 a.m.–12 p.m., 2 p.m.–5 p.m., 6 p.m. –9 p.m. downtown Chicago at the luxurious 2-hour Classroom Hours: Palmer House Hilton Hotel, located 9 a.m.–11 a.m., 2 p.m.–4 p.m. near Millennium Park in the heart of Marketplace: 10 a.m. –6:30 p.m. the theater, financial, and shopping districts of downtown Chicago. The Palmer House Hilton Hotel is within walking distance of the Windy City’s Sunday, October 26 most famous museums, shopping,a government, and corporate buildings. Registration: 8 a.m. –3 p.m. 3-hour Classroom Hours: The Palmer House Hilton Hotel 9 a.m.–12 p.m., 2 p.m.–5 p.m. -

KNITTING Definition Statement Relationship Between Large Subject
D04B KNITTING Definition statement This subclass/group covers: weft knitting machines are covered by D04B 7/00 to D04B 13/00, details of, or auxiliary devices incorporated in such machines are covered by D04B 15/00 and articles made by such machines are covered by D04B 1/00 warp knitting machines are covered by D04B 23/00 to D04B 25/00, details of, or auxiliary devices incorporated in such machines are covered by D04B 27/00 and articles made by such machines are covered by D04B 21/00 details of, or auxiliary devices incorporated in knitting machines not limited to a specific kind of knitting machine are covered by D04B 35/00 miscellaneous knitting machines and articles made by such machines are covered by D04B 39/00 hand knitting equipment is covered by D04B 3/00, D04B 5/00 and D04B 33/00 auxiliary apparatuses or devices for use with knitting machines are covered by D04B 37/00 or for hand knitting equipment are covered by D04B 17/00, D04B 19/00 and D04B 31/00 Relationship between large subject matter areas The difference between the subclass D04B and B32B5 is as follows:layered products including knitted products as such should be classified in B32B5 only; layered products formed by a knitting process featuring specified patterns or information on the composition of the knit article should be classified in D04B. Note that such products may comprise additional coated faces. References relevant to classification in this subclass This subclass/group does not cover: Layered products (i.e. laminates) B32B 5/00 including knitted articles 1 Knitted products of unspecified A41A61F structure or composition, e.g. -
Textile Design: a Suggested Program Guide
DOCUMENT RESUME CI 003 141 ED 102 409 95 Program Guide.Fashion TITLE Textile Design: A Suggested Industry Series No. 3. Fashion Inst. of Tech.,New York, N.T. INSTITUTION Education SPONS AGENCY Bureau of Adult,Vocational, and Technictl (DREW /OE), Washington,D.C. PUB DATE 73 in Fashion Industry NOTE 121p.; For other documents Series, see CB 003139-142 and CB 003 621 Printing AVAILABLE FROM Superintendent of Documents,U.S. Government Office, Washington, D.C.20402 EDRS PRICE NP -$0.76 HC-$5.70 PLUS POSTAGE Behavioral Objectives; DESCRIPTORS Adult, Vocational Education; Career Ladders; *CurriculumGuides; *Design; Design Crafts; EducationalEquipment; Employment Opportunities; InstructionalMaterials; *Job Training; Needle Trades;*Occupational Rome Economics; OccupationalInformation; Program Development; ResourceGuides; Resource Units; Secondary Education;Skill Development;*Textiles Instruction IDENTIFIERS *Fashion Industry ABSTRACT The textile designguide is the third of aseries of resource guidesencompassing the various five interrelated program guide is disensions of the fashionindustry. The job-preparatory conceived to provide youthand adults withintensive preparation for and also with careeradvancement initial entry esploysent jobs within the textile opportunities withinspecific categories of provides an overviewof the textiledesign field, industry. The guide required of workers. It occupational opportunities,and cospetencies contains outlines of areasof instruction whichinclude objectives to suggestions for learning be achieved,teaching