A Linux Kernel Scheduler Extension for Multi-Core Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Microkernel Mechanisms for Improving the Trustworthiness of Commodity Hardware
Microkernel Mechanisms for Improving the Trustworthiness of Commodity Hardware Yanyan Shen Submitted in fulfilment of the requirements for the degree of Doctor of Philosophy School of Computer Science and Engineering Faculty of Engineering March 2019 Thesis/Dissertation Sheet Surname/Family Name : Shen Given Name/s : Yanyan Abbreviation for degree as give in the University calendar : PhD Faculty : Faculty of Engineering School : School of Computer Science and Engineering Microkernel Mechanisms for Improving the Trustworthiness of Commodity Thesis Title : Hardware Abstract 350 words maximum: (PLEASE TYPE) The thesis presents microkernel-based software-implemented mechanisms for improving the trustworthiness of computer systems based on commercial off-the-shelf (COTS) hardware that can malfunction when the hardware is impacted by transient hardware faults. The hardware anomalies, if undetected, can cause data corruptions, system crashes, and security vulnerabilities, significantly undermining system dependability. Specifically, we adopt the single event upset (SEU) fault model and address transient CPU or memory faults. We take advantage of the functional correctness and isolation guarantee provided by the formally verified seL4 microkernel and hardware redundancy provided by multicore processors, design the redundant co-execution (RCoE) architecture that replicates a whole software system (including the microkernel) onto different CPU cores, and implement two variants, loosely-coupled redundant co-execution (LC-RCoE) and closely-coupled redundant co-execution (CC-RCoE), for the ARM and x86 architectures. RCoE treats each replica of the software system as a state machine and ensures that the replicas start from the same initial state, observe consistent inputs, perform equivalent state transitions, and thus produce consistent outputs during error-free executions. -

Dm-X: Protecting Volume-Level Integrity for Cloud Volumes and Local
dm-x: Protecting Volume-level Integrity for Cloud Volumes and Local Block Devices Anrin Chakraborti Bhushan Jain Jan Kasiak Stony Brook University Stony Brook University & Stony Brook University UNC, Chapel Hill Tao Zhang Donald Porter Radu Sion Stony Brook University & Stony Brook University & Stony Brook University UNC, Chapel Hill UNC, Chapel Hill ABSTRACT on Amazon’s Virtual Private Cloud (VPC) [2] (which provides The verified boot feature in recent Android devices, which strong security guarantees through network isolation) store deploys dm-verity, has been overwhelmingly successful in elim- data on untrusted storage devices residing in the public cloud. inating the extremely popular Android smart phone rooting For example, Amazon VPC file systems, object stores, and movement [25]. Unfortunately, dm-verity integrity guarantees databases reside on virtual block devices in the Amazon are read-only and do not extend to writable volumes. Elastic Block Storage (EBS). This paper introduces a new device mapper, dm-x, that This allows numerous attack vectors for a malicious cloud efficiently (fast) and reliably (metadata journaling) assures provider/untrusted software running on the server. For in- volume-level integrity for entire, writable volumes. In a direct stance, to ensure SEC-mandated assurances of end-to-end disk setup, dm-x overheads are around 6-35% over ext4 on the integrity, banks need to guarantee that the external cloud raw volume while offering additional integrity guarantees. For storage service is unable to remove log entries documenting cloud storage (Amazon EBS), dm-x overheads are negligible. financial transactions. Yet, without integrity of the storage device, a malicious cloud storage service could remove logs of a coordinated attack. -
Reducing Power Consumption in Mobile Devices by Using a Kernel
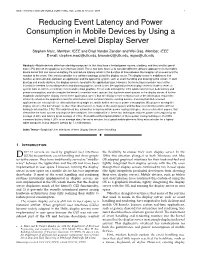
IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. Z, NO. B, AUGUST 2017 1 Reducing Event Latency and Power Consumption in Mobile Devices by Using a Kernel-Level Display Server Stephen Marz, Member, IEEE and Brad Vander Zanden and Wei Gao, Member, IEEE E-mail: [email protected], [email protected], [email protected] Abstract—Mobile devices differ from desktop computers in that they have a limited power source, a battery, and they tend to spend more CPU time on the graphical user interface (GUI). These two facts force us to consider different software approaches in the mobile device kernel that can conserve battery life and reduce latency, which is the duration of time between the inception of an event and the reaction to the event. One area to consider is a software package called the display server. The display server is middleware that handles all GUI activities between an application and the operating system, such as event handling and drawing to the screen. In both desktop and mobile devices, the display server is located in the application layer. However, the kernel layer contains most of the information needed for handling events and drawing graphics, which forces the application-level display server to make a series of system calls in order to coordinate events and to draw graphics. These calls interrupt the CPU which can increase both latency and power consumption, and also require the kernel to maintain event queues that duplicate event queues in the display server. A further drawback of placing the display server in the application layer is that the display server contains most of the information required to efficiently schedule the application and this information is not communicated to existing kernels, meaning that GUI-oriented applications are scheduled less efficiently than they might be, which further increases power consumption. -
Advanced Operating Systems #1
<Slides download> https://www.pf.is.s.u-tokyo.ac.jp/classes Advanced Operating Systems #2 Hiroyuki Chishiro Project Lecturer Department of Computer Science Graduate School of Information Science and Technology The University of Tokyo Room 007 Introduction of Myself • Name: Hiroyuki Chishiro • Project Lecturer at Kato Laboratory in December 2017 - Present. • Short Bibliography • Ph.D. at Keio University on March 2012 (Yamasaki Laboratory: Same as Prof. Kato). • JSPS Research Fellow (PD) in April 2012 – March 2014. • Research Associate at Keio University in April 2014 – March 2016. • Assistant Professor at Advanced Institute of Industrial Technology in April 2016 – November 2017. • Research Interests • Real-Time Systems • Operating Systems • Middleware • Trading Systems Course Plan • Multi-core Resource Management • Many-core Resource Management • GPU Resource Management • Virtual Machines • Distributed File Systems • High-performance Networking • Memory Management • Network on a Chip • Embedded Real-time OS • Device Drivers • Linux Kernel Schedule 1. 2018.9.28 Introduction + Linux Kernel (Kato) 2. 2018.10.5 Linux Kernel (Chishiro) 3. 2018.10.12 Linux Kernel (Kato) 4. 2018.10.19 Linux Kernel (Kato) 5. 2018.10.26 Linux Kernel (Kato) 6. 2018.11.2 Advanced Research (Chishiro) 7. 2018.11.9 Advanced Research (Chishiro) 8. 2018.11.16 (No Class) 9. 2018.11.23 (Holiday) 10. 2018.11.30 Advanced Research (Kato) 11. 2018.12.7 Advanced Research (Kato) 12. 2018.12.14 Advanced Research (Chishiro) 13. 2018.12.21 Linux Kernel 14. 2019.1.11 Linux Kernel 15. 2019.1.18 (No Class) 16. 2019.1.25 (No Class) Linux Kernel Introducing Synchronization /* The cases for Linux */ Acknowledgement: Prof. -

Process Scheduling Ii
PROCESS SCHEDULING II CS124 – Operating Systems Spring 2021, Lecture 12 2 Real-Time Systems • Increasingly common to have systems with real-time scheduling requirements • Real-time systems are driven by specific events • Often a periodic hardware timer interrupt • Can also be other events, e.g. detecting a wheel slipping, or an optical sensor triggering, or a proximity sensor reaching a threshold • Event latency is the amount of time between an event occurring, and when it is actually serviced • Usually, real-time systems must keep event latency below a minimum required threshold • e.g. antilock braking system has 3-5 ms to respond to wheel-slide • The real-time system must try to meet its deadlines, regardless of system load • Of course, may not always be possible… 3 Real-Time Systems (2) • Hard real-time systems require tasks to be serviced before their deadlines, otherwise the system has failed • e.g. robotic assembly lines, antilock braking systems • Soft real-time systems do not guarantee tasks will be serviced before their deadlines • Typically only guarantee that real-time tasks will be higher priority than other non-real-time tasks • e.g. media players • Within the operating system, two latencies affect the event latency of the system’s response: • Interrupt latency is the time between an interrupt occurring, and the interrupt service routine beginning to execute • Dispatch latency is the time the scheduler dispatcher takes to switch from one process to another 4 Interrupt Latency • Interrupt latency in context: Interrupt! Task -

What Is an Operating System III 2.1 Compnents II an Operating System
Page 1 of 6 What is an Operating System III 2.1 Compnents II An operating system (OS) is software that manages computer hardware and software resources and provides common services for computer programs. The operating system is an essential component of the system software in a computer system. Application programs usually require an operating system to function. Memory management Among other things, a multiprogramming operating system kernel must be responsible for managing all system memory which is currently in use by programs. This ensures that a program does not interfere with memory already in use by another program. Since programs time share, each program must have independent access to memory. Cooperative memory management, used by many early operating systems, assumes that all programs make voluntary use of the kernel's memory manager, and do not exceed their allocated memory. This system of memory management is almost never seen any more, since programs often contain bugs which can cause them to exceed their allocated memory. If a program fails, it may cause memory used by one or more other programs to be affected or overwritten. Malicious programs or viruses may purposefully alter another program's memory, or may affect the operation of the operating system itself. With cooperative memory management, it takes only one misbehaved program to crash the system. Memory protection enables the kernel to limit a process' access to the computer's memory. Various methods of memory protection exist, including memory segmentation and paging. All methods require some level of hardware support (such as the 80286 MMU), which doesn't exist in all computers. -

Onload User Guide
Onload User Guide Copyright © 2017 SOLARFLARE Communications, Inc. All rights reserved. The software and hardware as applicable (the “Product”) described in this document, and this document, are protected by copyright laws, patents and other intellectual property laws and international treaties. The Product described in this document is provided pursuant to a license agreement, evaluation agreement and/or non‐disclosure agreement. The Product may be used only in accordance with the terms of such agreement. The software as applicable may be copied only in accordance with the terms of such agreement. Onload is licensed under the GNU General Public License (Version 2, June 1991). See the LICENSE file in the distribution for details. The Onload Extensions Stub Library is Copyright licensed under the BSD 2‐Clause License. Onload contains algorithms and uses hardware interface techniques which are subject to Solarflare Communications Inc patent applications. Parties interested in licensing Solarflare's IP are encouraged to contact Solarflare's Intellectual Property Licensing Group at: Director of Intellectual Property Licensing Intellectual Property Licensing Group Solarflare Communications Inc, 7505 Irvine Center Drive Suite 100 Irvine, California 92618 You will not disclose to a third party the results of any performance tests carried out using Onload or EnterpriseOnload without the prior written consent of Solarflare. The furnishing of this document to you does not give you any rights or licenses, express or implied, by estoppel or otherwise, with respect to any such Product, or any copyrights, patents or other intellectual property rights covering such Product, and this document does not contain or represent any commitment of any kind on the part of SOLARFLARE Communications, Inc. -

Programmer's Guide
Programmer’s Guide Release 18.11.11 Jan 20, 2021 CONTENTS 1 Introduction 1 1.1 Documentation Roadmap...............................1 1.2 Related Publications..................................2 2 Overview 3 2.1 Development Environment..............................3 2.2 Environment Abstraction Layer............................4 2.3 Core Components...................................4 2.3.1 Ring Manager (librte_ring)..........................4 2.3.2 Memory Pool Manager (librte_mempool)..................4 2.3.3 Network Packet Buffer Management (librte_mbuf).............6 2.3.4 Timer Manager (librte_timer)........................6 2.4 Ethernet* Poll Mode Driver Architecture.......................6 2.5 Packet Forwarding Algorithm Support........................6 2.6 librte_net........................................6 3 Environment Abstraction Layer7 3.1 EAL in a Linux-userland Execution Environment..................7 3.1.1 Initialization and Core Launching......................8 3.1.2 Shutdown and Cleanup...........................8 3.1.3 Multi-process Support............................8 3.1.4 Memory Mapping Discovery and Memory Reservation..........8 3.1.5 Support for Externally Allocated Memory.................. 11 3.1.6 Per-lcore and Shared Variables....................... 12 3.1.7 Logs...................................... 12 3.1.8 CPU Feature Identification.......................... 12 3.1.9 User Space Interrupt Event......................... 13 3.1.10 Blacklisting.................................. 14 3.1.11 Misc Functions............................... -

Linux Kernal II 9.1 Architecture
Page 1 of 7 Linux Kernal II 9.1 Architecture: The Linux kernel is a Unix-like operating system kernel used by a variety of operating systems based on it, which are usually in the form of Linux distributions. The Linux kernel is a prominent example of free and open source software. Programming language The Linux kernel is written in the version of the C programming language supported by GCC (which has introduced a number of extensions and changes to standard C), together with a number of short sections of code written in the assembly language (in GCC's "AT&T-style" syntax) of the target architecture. Because of the extensions to C it supports, GCC was for a long time the only compiler capable of correctly building the Linux kernel. Compiler compatibility GCC is the default compiler for the Linux kernel source. In 2004, Intel claimed to have modified the kernel so that its C compiler also was capable of compiling it. There was another such reported success in 2009 with a modified 2.6.22 version of the kernel. Since 2010, effort has been underway to build the Linux kernel with Clang, an alternative compiler for the C language; as of 12 April 2014, the official kernel could almost be compiled by Clang. The project dedicated to this effort is named LLVMLinxu after the LLVM compiler infrastructure upon which Clang is built. LLVMLinux does not aim to fork either the Linux kernel or the LLVM, therefore it is a meta-project composed of patches that are eventually submitted to the upstream projects. -

Linux Kernel Development 3Rd Edition
ptg Linux Kernel Development Third Edition ptg From the Library of Wow! eBook Developer’s Library ESSENTIAL REFERENCES FOR PROGRAMMING PROFESSIONALS Developer’s Library books are designed to provide practicing programmers with unique, high-quality references and tutorials on the programming languages and technologies they use in their daily work. All books in the Developer’s Library are written by expert technology practitioners who are especially skilled at organizing and presenting information in a way that’s useful for other programmers. Key titles include some of the best, most widely acclaimed books within their topic areas: PHP & MySQL Web Development Python Essential Reference Luke Welling & Laura Thomson David Beazley ISBN 978-0-672-32916-6 ISBN-13: 978-0-672-32978-6 MySQL Programming in Objective-C 2.0 ptg Paul DuBois Stephen G. Kochan ISBN-13: 978-0-672-32938-8 ISBN-13: 978-0-321-56615-7 Linux Kernel Development PostgreSQL Robert Love Korry Douglas ISBN-13: 978-0-672-32946-3 ISBN-13: 978-0-672-33015-5 Developer’s Library books are available at most retail and online bookstores, as well as by subscription from Safari Books Online at safari.informit.com Developer’s Library informit.com/devlibrary From the Library of Wow! eBook Linux Kernel Development ptg Third Edition Robert Love Upper Saddle River, NJ • Boston • Indianapolis • San Francisco New York • Toronto • Montreal • London • Munich • Paris • Madrid Cape Town • Sydney • Tokyo • Singapore • Mexico City From the Library of Wow! eBook Linux Kernel Development Acquisitions Editor Third Edition Mark Taber Development Copyright © 2010 Pearson Education, Inc. -
Chapter 5. Kernel Synchronization
Chapter 5. Kernel Synchronization You could think of the kernel as a server that answers requests; these requests can come either from a process running on a CPU or an external device issuing an interrupt request. We make this analogy to underscore that parts of the kernel are not run serially, but in an interleaved way. Thus, they can give rise to race conditions, which must be controlled through proper synchronization techniques. A general introduction to these topics can be found in the section "An Overview of Unix Kernels" in Chapter 1 of the book. We start this chapter by reviewing when, and to what extent, kernel requests are executed in an interleaved fashion. We then introduce the basic synchronization primitives implemented by the kernel and describe how they are applied in the most common cases. 5.1.1. Kernel Preemption a kernel is preemptive if a process switch may occur while the replaced process is executing a kernel function, that is, while it runs in Kernel Mode. Unfortunately, in Linux (as well as in any other real operating system) things are much more complicated: Both in preemptive and nonpreemptive kernels, a process running in Kernel Mode can voluntarily relinquish the CPU, for instance because it has to sleep waiting for some resource. We will call this kind of process switch a planned process switch. However, a preemptive kernel differs from a nonpreemptive kernel on the way a process running in Kernel Mode reacts to asynchronous events that could induce a process switch - for instance, an interrupt handler that awakes a higher priority process. -
ODROID-HC2: 3.5” High Powered Storage February 1, 2018
ODROID WiFi Access Point: Share Files Via Samba February 1, 2018 How to setup an ODROID with a WiFi access point so that an ODROID’s hard drive can be accessed and modied from another computer. This is primarily aimed at allowing access to images, videos, and log les on the ODROID. ODROID-HC2: 3.5” High powered storage February 1, 2018 The ODROID-HC2 is an aordable mini PC and perfect solution for a network attached storage (NAS) server. This device home cloud-server capabilities centralizes data and enables users to share and stream multimedia les to phones, tablets, and other devices across a network. It is an ideal tool for many use Using SquashFS As A Read-Only Root File System February 1, 2018 This guide describes the usage of SquashFS PiFace: Control and Display 2 February 1, 2018 For those who have the PiFace Control and Display 2, and want to make it compatible with the ODROID-C2 Android Gaming: Data Wing, Space Frontier, and Retro Shooting – Pixel Space Shooter February 1, 2018 Variations on a theme! Race, blast into space, and blast things into pieces that are racing towards us. The fun doesn’t need to stop when you take a break from your projects. Our monthly pick on Android games. Linux Gaming: Saturn Games – Part 1 February 1, 2018 I think it’s time we go into a bit more detail about Sega Saturn for the ODROID-XU3/XU4 Gaming Console: Running Your Favorite Games On An ODROID-C2 Using Android February 1, 2018 I built a gaming console using an ODROID-C2 running Android 6 Controller Area Network (CAN) Bus: Implementation