Challenges Using Linux As a Real-Time Operating System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Microkernel Mechanisms for Improving the Trustworthiness of Commodity Hardware
Microkernel Mechanisms for Improving the Trustworthiness of Commodity Hardware Yanyan Shen Submitted in fulfilment of the requirements for the degree of Doctor of Philosophy School of Computer Science and Engineering Faculty of Engineering March 2019 Thesis/Dissertation Sheet Surname/Family Name : Shen Given Name/s : Yanyan Abbreviation for degree as give in the University calendar : PhD Faculty : Faculty of Engineering School : School of Computer Science and Engineering Microkernel Mechanisms for Improving the Trustworthiness of Commodity Thesis Title : Hardware Abstract 350 words maximum: (PLEASE TYPE) The thesis presents microkernel-based software-implemented mechanisms for improving the trustworthiness of computer systems based on commercial off-the-shelf (COTS) hardware that can malfunction when the hardware is impacted by transient hardware faults. The hardware anomalies, if undetected, can cause data corruptions, system crashes, and security vulnerabilities, significantly undermining system dependability. Specifically, we adopt the single event upset (SEU) fault model and address transient CPU or memory faults. We take advantage of the functional correctness and isolation guarantee provided by the formally verified seL4 microkernel and hardware redundancy provided by multicore processors, design the redundant co-execution (RCoE) architecture that replicates a whole software system (including the microkernel) onto different CPU cores, and implement two variants, loosely-coupled redundant co-execution (LC-RCoE) and closely-coupled redundant co-execution (CC-RCoE), for the ARM and x86 architectures. RCoE treats each replica of the software system as a state machine and ensures that the replicas start from the same initial state, observe consistent inputs, perform equivalent state transitions, and thus produce consistent outputs during error-free executions. -
Advanced Operating Systems #1
<Slides download> https://www.pf.is.s.u-tokyo.ac.jp/classes Advanced Operating Systems #2 Hiroyuki Chishiro Project Lecturer Department of Computer Science Graduate School of Information Science and Technology The University of Tokyo Room 007 Introduction of Myself • Name: Hiroyuki Chishiro • Project Lecturer at Kato Laboratory in December 2017 - Present. • Short Bibliography • Ph.D. at Keio University on March 2012 (Yamasaki Laboratory: Same as Prof. Kato). • JSPS Research Fellow (PD) in April 2012 – March 2014. • Research Associate at Keio University in April 2014 – March 2016. • Assistant Professor at Advanced Institute of Industrial Technology in April 2016 – November 2017. • Research Interests • Real-Time Systems • Operating Systems • Middleware • Trading Systems Course Plan • Multi-core Resource Management • Many-core Resource Management • GPU Resource Management • Virtual Machines • Distributed File Systems • High-performance Networking • Memory Management • Network on a Chip • Embedded Real-time OS • Device Drivers • Linux Kernel Schedule 1. 2018.9.28 Introduction + Linux Kernel (Kato) 2. 2018.10.5 Linux Kernel (Chishiro) 3. 2018.10.12 Linux Kernel (Kato) 4. 2018.10.19 Linux Kernel (Kato) 5. 2018.10.26 Linux Kernel (Kato) 6. 2018.11.2 Advanced Research (Chishiro) 7. 2018.11.9 Advanced Research (Chishiro) 8. 2018.11.16 (No Class) 9. 2018.11.23 (Holiday) 10. 2018.11.30 Advanced Research (Kato) 11. 2018.12.7 Advanced Research (Kato) 12. 2018.12.14 Advanced Research (Chishiro) 13. 2018.12.21 Linux Kernel 14. 2019.1.11 Linux Kernel 15. 2019.1.18 (No Class) 16. 2019.1.25 (No Class) Linux Kernel Introducing Synchronization /* The cases for Linux */ Acknowledgement: Prof. -

Process Scheduling Ii
PROCESS SCHEDULING II CS124 – Operating Systems Spring 2021, Lecture 12 2 Real-Time Systems • Increasingly common to have systems with real-time scheduling requirements • Real-time systems are driven by specific events • Often a periodic hardware timer interrupt • Can also be other events, e.g. detecting a wheel slipping, or an optical sensor triggering, or a proximity sensor reaching a threshold • Event latency is the amount of time between an event occurring, and when it is actually serviced • Usually, real-time systems must keep event latency below a minimum required threshold • e.g. antilock braking system has 3-5 ms to respond to wheel-slide • The real-time system must try to meet its deadlines, regardless of system load • Of course, may not always be possible… 3 Real-Time Systems (2) • Hard real-time systems require tasks to be serviced before their deadlines, otherwise the system has failed • e.g. robotic assembly lines, antilock braking systems • Soft real-time systems do not guarantee tasks will be serviced before their deadlines • Typically only guarantee that real-time tasks will be higher priority than other non-real-time tasks • e.g. media players • Within the operating system, two latencies affect the event latency of the system’s response: • Interrupt latency is the time between an interrupt occurring, and the interrupt service routine beginning to execute • Dispatch latency is the time the scheduler dispatcher takes to switch from one process to another 4 Interrupt Latency • Interrupt latency in context: Interrupt! Task -

What Is an Operating System III 2.1 Compnents II an Operating System
Page 1 of 6 What is an Operating System III 2.1 Compnents II An operating system (OS) is software that manages computer hardware and software resources and provides common services for computer programs. The operating system is an essential component of the system software in a computer system. Application programs usually require an operating system to function. Memory management Among other things, a multiprogramming operating system kernel must be responsible for managing all system memory which is currently in use by programs. This ensures that a program does not interfere with memory already in use by another program. Since programs time share, each program must have independent access to memory. Cooperative memory management, used by many early operating systems, assumes that all programs make voluntary use of the kernel's memory manager, and do not exceed their allocated memory. This system of memory management is almost never seen any more, since programs often contain bugs which can cause them to exceed their allocated memory. If a program fails, it may cause memory used by one or more other programs to be affected or overwritten. Malicious programs or viruses may purposefully alter another program's memory, or may affect the operation of the operating system itself. With cooperative memory management, it takes only one misbehaved program to crash the system. Memory protection enables the kernel to limit a process' access to the computer's memory. Various methods of memory protection exist, including memory segmentation and paging. All methods require some level of hardware support (such as the 80286 MMU), which doesn't exist in all computers. -

HOW FAST IS RF? by RON HRANAC
Originally appeared in the September 2008 issue of Communications Technology. HOW FAST IS RF? By RON HRANAC Maybe a better question is, "What's the speed of an electromagnetic signal in a vacuum?" After all, what we call RF refers to signals in the lower frequency or longer wavelength part of the electromagnetic spectrum. Light is an electromagnetic signal, too, existing in the higher frequency or shorter wavelength part of the electromagnetic spectrum. One way to look at it is to assume that RF is nothing more than really, really low frequency light, or that light is really, really high frequency RF. As you might imagine, the numbers involved in describing RF and light can be very large or very small. For more on this, see my June 2007 CT column, "Big Numbers, Small Numbers" (www.cable360.net/ct/operations/techtalk/23783.html). According to the National Institute of Standards and Technology, the speed of light in a vacuum, c0, is 299,792,458 meters per second (http://physics.nist.gov/cgi-bin/cuu/Value?c). The designation c0 is one that NIST uses to reference the speed of light in a vacuum, while c is occasionally used to reference the speed of light in some other medium. Most of the time the subscript zero is dropped, with c being a generic designation for the speed of light. Let's put c0 in terms that may be more familiar. You probably recall from junior high or high school science class that the speed of light is 186,000 miles per second. -

Linux Kernal II 9.1 Architecture
Page 1 of 7 Linux Kernal II 9.1 Architecture: The Linux kernel is a Unix-like operating system kernel used by a variety of operating systems based on it, which are usually in the form of Linux distributions. The Linux kernel is a prominent example of free and open source software. Programming language The Linux kernel is written in the version of the C programming language supported by GCC (which has introduced a number of extensions and changes to standard C), together with a number of short sections of code written in the assembly language (in GCC's "AT&T-style" syntax) of the target architecture. Because of the extensions to C it supports, GCC was for a long time the only compiler capable of correctly building the Linux kernel. Compiler compatibility GCC is the default compiler for the Linux kernel source. In 2004, Intel claimed to have modified the kernel so that its C compiler also was capable of compiling it. There was another such reported success in 2009 with a modified 2.6.22 version of the kernel. Since 2010, effort has been underway to build the Linux kernel with Clang, an alternative compiler for the C language; as of 12 April 2014, the official kernel could almost be compiled by Clang. The project dedicated to this effort is named LLVMLinxu after the LLVM compiler infrastructure upon which Clang is built. LLVMLinux does not aim to fork either the Linux kernel or the LLVM, therefore it is a meta-project composed of patches that are eventually submitted to the upstream projects. -

A Linux Kernel Scheduler Extension for Multi-Core Systems
A Linux Kernel Scheduler Extension For Multi-Core Systems Aleix Roca Nonell Master in Innovation and Research in Informatics (MIRI) specialized in High Performance Computing (HPC) Facultat d’informàtica de Barcelona (FIB) Universitat Politècnica de Catalunya Supervisor: Vicenç Beltran Querol Cosupervisor: Eduard Ayguadé Parra Presentation date: 25 October 2017 Abstract The Linux Kernel OS is a black box from the user-space point of view. In most cases, this is not a problem. However, for parallel high performance computing applications it can be a limitation. Such applications usually execute on top of a runtime system, itself executing on top of a general purpose kernel. Current runtime systems take care of getting the most of each system core by distributing work among the multiple CPUs of a machine but they are not aware of when one of their threads perform blocking calls (e.g. I/O operations). When such a blocking call happens, the processing core is stalled, leading to performance loss. In this thesis, it is presented the proof-of-concept of a Linux kernel extension denoted User Monitored Threads (UMT). The extension allows a user-space application to be notified of the blocking and unblocking of its threads, making it possible for a core to execute another worker thread while the other is blocked. An existing runtime system (namely Nanos6) is adapted, so that it takes advantage of the kernel extension. The whole prototype is tested on a synthetic benchmarks and an industry mock-up application. The analysis of the results shows, on the tested hardware and the appropriate conditions, a significant speedup improvement. -
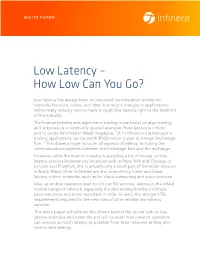
Low Latency – How Low Can You Go?
WHITE PAPER Low Latency – How Low Can You Go? Low latency has always been an important consideration in telecom networks for voice, video, and data, but recent changes in applications within many industry sectors have brought low latency right to the forefront of the industry. The finance industry and algorithmic trading in particular, or algo-trading as it is known, is a commonly quoted example. Here latency is critical, and to quote Information Week magazine, “A 1-millisecond advantage in trading applications can be worth $100 million a year to a major brokerage firm.” This drives a huge focus on all aspects of latency, including the communications systems between the brokerage firm and the exchange. However, while the finance industry is spending a lot of money on low- latency services between key locations such as New York and Chicago or London and Frankfurt, this is actually only a small part of the wider telecom industry. Many other industries are also now driving lower and lower latency in their networks, such as for cloud computing and video services. Also, as mobile operators start to roll out 5G services, latency in the xHaul mobile transport network, especially the demanding fronthaul domain, becomes more and more important in order to reach the stringent 5G requirements required for the new class of ultra-reliable low-latency services. This white paper will address the drivers behind the recent rush to low- latency solutions and networks and will consider how network operators can remove as much latency as possible from their networks as they also race to zero latency. -

Timestamp Precision
Timestamp Precision Kevin Bross 15 April 2016 15 April 2016 IEEE 1904 Access Networks Working Group, San Jose, CA USA 1 Timestamp Packets The orderInfo field can be used as a 32-bit timestamp, down to ¼ ns granularity: 1 s 30 bits of nanoseconds 2 ¼ ms µs ns ns Two main uses of timestamp: – Indicating start or end time of flow – Indicating presentation time of packets for flows with non-constant data rates s = second ms = millisecond µs = microsecond ns = nanosecond 15 April 2016 IEEE 1904 Access Networks Working Group, San Jose, CA USA 2 Presentation Time To reduce bandwidth during idle periods, some protocols will have variable rates – Fronthaul may be variable, even if rate to radio unit itself is a constant rate Presentation times allows RoE to handle variable data rates – Data may experience jitter in network – Egress buffer compensates for network jitter – Presentation time is when the data is to exit the RoE node • Jitter cleaners ensure data comes out cleanly, and on the right bit period 15 April 2016 IEEE 1904 Access Networks Working Group, San Jose, CA USA 3 Jitter vs. Synchronization Synchronization requirements for LTE are only down to ~±65 ns accuracy – Each RoE node may be off from TAI by up to 65 ns (or more in some circumstances) – Starting and ending a stream may be off by this amount …but jitter from packet to packet must be much tighter – RoE nodes should be able to output data at precise relative times if timestamp is used for a given packet – Relative bit time within a flow is important 15 April 2016 IEEE 1904 Access -
Chapter 5. Kernel Synchronization
Chapter 5. Kernel Synchronization You could think of the kernel as a server that answers requests; these requests can come either from a process running on a CPU or an external device issuing an interrupt request. We make this analogy to underscore that parts of the kernel are not run serially, but in an interleaved way. Thus, they can give rise to race conditions, which must be controlled through proper synchronization techniques. A general introduction to these topics can be found in the section "An Overview of Unix Kernels" in Chapter 1 of the book. We start this chapter by reviewing when, and to what extent, kernel requests are executed in an interleaved fashion. We then introduce the basic synchronization primitives implemented by the kernel and describe how they are applied in the most common cases. 5.1.1. Kernel Preemption a kernel is preemptive if a process switch may occur while the replaced process is executing a kernel function, that is, while it runs in Kernel Mode. Unfortunately, in Linux (as well as in any other real operating system) things are much more complicated: Both in preemptive and nonpreemptive kernels, a process running in Kernel Mode can voluntarily relinquish the CPU, for instance because it has to sleep waiting for some resource. We will call this kind of process switch a planned process switch. However, a preemptive kernel differs from a nonpreemptive kernel on the way a process running in Kernel Mode reacts to asynchronous events that could induce a process switch - for instance, an interrupt handler that awakes a higher priority process. -

Discovery of Frequency-Sweeping Millisecond Solar Radio Bursts Near 1400 Mhz with a Small Interferometer Physics Department Senior Honors Thesis 2006 Eric R
Discovery of frequency-sweeping millisecond solar radio bursts near 1400 MHz with a small interferometer Physics Department Senior Honors Thesis 2006 Eric R. Evarts Brandeis University Abstract While testing the Small Radio Telescope Interferometer at Haystack Observatory, we noticed occasional strong fringes on the Sun. Upon closer study of this activity, I find that each significant burst corresponds to an X-ray solar flare and corresponds to data observed by RSTN. At very short integrations (512 µs), most bursts disappear in the noise, but a few still show very strong fringes. Studying these <25 events at 512 µs integration reveals 2 types of burst: one with frequency structure and one without. Bursts with frequency structure have a brightness temperature ~1013K, while bursts without frequency structure have a brightness temperature ~108K. These bursts are studied at higher frequency resolution than any previous solar study revealing a very distinct structure that is not currently understood. 1 Table of Contents Abstract ..........................................................................................................................1 Table of Contents...........................................................................................................3 Introduction ...................................................................................................................5 Interferometry Crash Course ........................................................................................5 The Small Radio Telescope -

Microsecond and Millisecond Dynamics in the Photosynthetic
Microsecond and millisecond dynamics in the photosynthetic protein LHCSR1 observed by single-molecule correlation spectroscopy Toru Kondoa,1,2, Jesse B. Gordona, Alberta Pinnolab,c, Luca Dall’Ostob, Roberto Bassib, and Gabriela S. Schlau-Cohena,1 aDepartment of Chemistry, Massachusetts Institute of Technology, Cambridge, MA 02139; bDepartment of Biotechnology, University of Verona, 37134 Verona, Italy; and cDepartment of Biology and Biotechnology, University of Pavia, 27100 Pavia, Italy Edited by Catherine J. Murphy, University of Illinois at Urbana–Champaign, Urbana, IL, and approved April 11, 2019 (received for review December 13, 2018) Biological systems are subjected to continuous environmental (5–9) or intensity correlation function analysis (10). CPF analysis fluctuations, and therefore, flexibility in the structure and func- bins the photon data, obscuring fast dynamics. In contrast, inten- tion of their protein building blocks is essential for survival. sity correlation function analysis characterizes fluctuations in the Protein dynamics are often local conformational changes, which photon arrival rate, accessing dynamics down to microseconds. allows multiple dynamical processes to occur simultaneously and However, the fluorescence lifetime is a powerful indicator of rapidly in individual proteins. Experiments often average over conformation for chromoproteins and for lifetime-based FRET these dynamics and their multiplicity, preventing identification measurements, yet it is ignored in intensity-based analyses. of the molecular origin and impact on biological function. Green 2D fluorescence lifetime correlation (2D-FLC) analysis was plants survive under high light by quenching excess energy, recently introduced as a method to both resolve fast dynam- and Light-Harvesting Complex Stress Related 1 (LHCSR1) is the ics and use fluorescence lifetime information (11, 12).