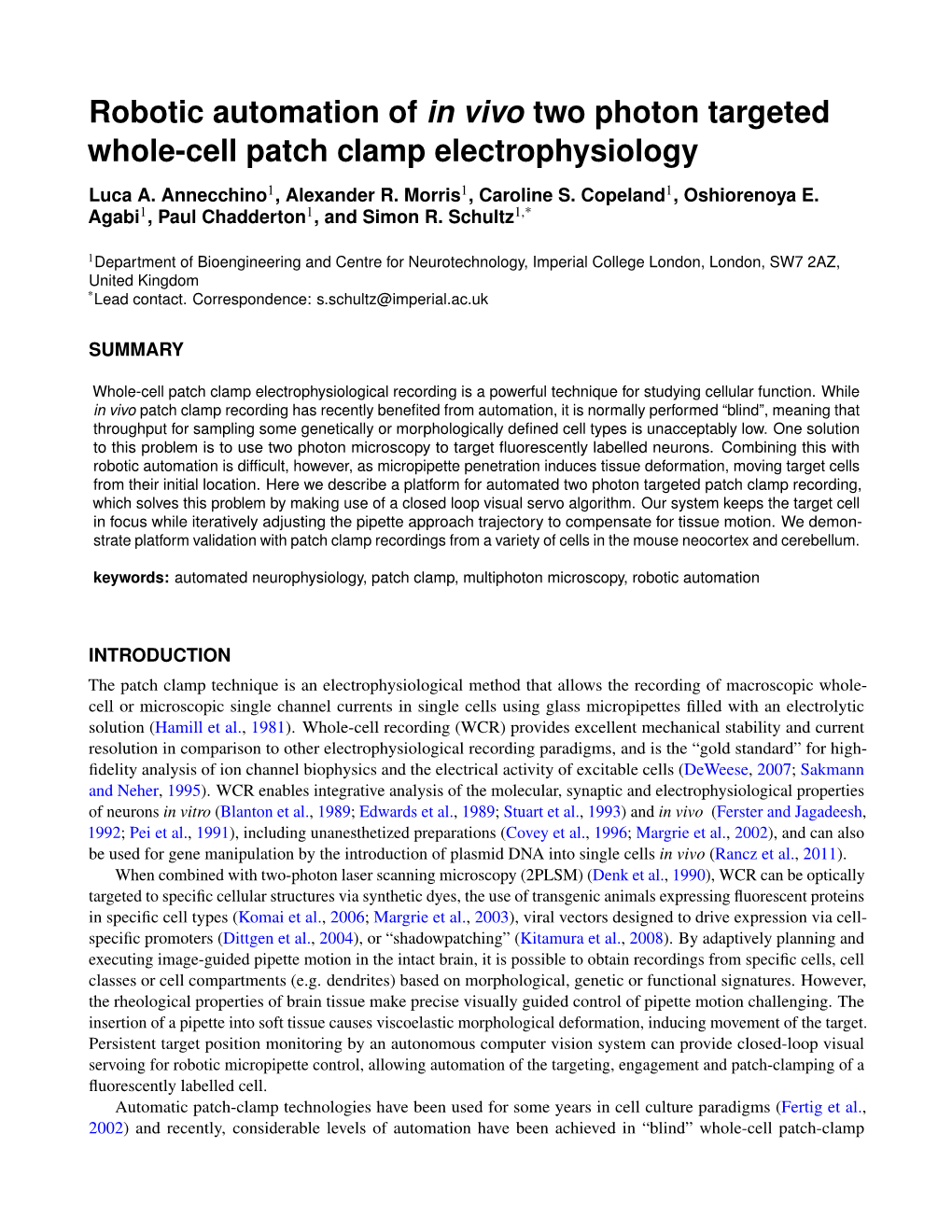
Robotic Automation of in Vivo Two Photon Targeted Whole-Cell Patch Clamp Electrophysiology
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Getinge Lancer LSS 590 Laboratory Steam Sterilizer Specifications GETINGE LANCER LSS 590 2 Basic Specifications
Getinge Lancer LSS 590 Laboratory Steam Sterilizer Specifications GETINGE LANCER LSS 590 2 Basic specifications Top Top, Recessed 64.7 39.5 63.9 26 63 51 26.5 74 Front Side, Recessed LSS 590 • Internal Volume 20.7 cu. ft. (586 L) • Door Configurations Single Door or Double Door, Pass-through • Design Operating Temperature Gravity/Vacuum Cycles: 230°–275°F (110°–135°C) Liquid Cycles: 219°–275°F (104°–135°C) Optional Low Temp Cycle: 169°–212°F (76°–100°C) • Interior Dimensions (w × h × d) 26.5" × 26.5" × 51" (672 × 672 × 1300 mm) • Exterior Dimensions (w × h × d) Single Door: 39.5" × 74" × 63.9” (1003 × 1880 × 1623 mm) Double Door: 39.5" × 74" × 64.7" (1003 × 1880 × 1643 mm) GETINGE LANCER LSS 590 3 Part 1: Selection Guide Door Configuration • single door • double door, pass-through Steam Source • facility/house steam (standard) • steam generator(s) - 208V, AC, 50/60Hz, 3-phase - 240V, AC, 50/60Hz, 3-phase - 380V, AC, 50Hz, 3-phase - 480V, AC, 60Hz, 3-phase - 600V, AC, 60Hz, 3-phase - carbon steel (standard) - stainless steel - manual blowdown (standard) - automatic blowdown Steam generator is located integral to the sterilizer (possible in combination with vacuum pump for LSS 590). Remotely located Air Removal • ejector (standard) • vacuum pump, liquid ring - 208V, AC, 60Hz, 3-phase - 380V, AC, 50Hz, 3-phase - 480V, AC, 60Hz, 3-phase Additional Programs • Sealed liquids and low temp cycles (vacuum pump and load probe required) Recesses and Barriers • recessed, one-wall • recessed, two-wall • freestanding (cabinet enclosure panels required) • with cross contamination barrier flange GETINGE LANCER LSS 590 DATE: CUSTOMER / FACILITY: 4 Part 2: General Specifications The Getinge Lancer LSS 590 Steam Sterilizer is designed Specifications Index for high- performance sterilization of labware, media and Sterilizer 6 laboratory byproducts used in research, analytical, environ- mental and industrial laboratories. -

Vacuum Products 450 455 454 453 452
VACUUM PRODUCTS 450 PIAB piCOMPACT Integrated Controls Ejectors 452 PIAB piINLINE Vacuum Ejectors 453 PIAB piCLASSIC Classic Pumps ELMO RIETSCHLE Rotary Vane 454 Vacuum Pumps & Blowers ELMO RIETSCHLE Vacuum Pumps 455 & Accessories NINE PIAB PRODUCT OVERVIEW Nine 428 PIAB PRODUCT OVERVIEW Nine 429 AN ECO-FRIENDLY VACUUM SYSTEM By never using more energy than absolutely necessary, companies can reduce their carbon footprint as well as their costs. Piab can work with you to achieve the lowest possible energy consumption. ENVIRONMENTAL INDEX Your pump will require less compressed air when placed close to the point of suction, thus reducing CO2 emissions and energy consumption. The graph demonstrates the relationship between environmental impact and the distance of the pump from the point of suction. BEST TO USE A DECENTRALISED VACUUM SYSTEM A decentralised system with the vacuum pump / cartridge placed directly at the point of suction eliminates the risk of loss in the vacuum piping and the need for expensive, oversized components. A centralised vacuum system is designed to have one vacuum source for multiple suction points. • Lowest energy usage • Fastest cycle time • Safest product handling • Most flexible design for zoning • Easiest troubleshooting • Independently working suction cups Nine • Most consistent / even performance IF NOT, DESIGN A CENTRALISED VACUUM SYSTEM A centralised vacuum system is designed to have one vacuum source for multiple suction points. • Easy installation • Easy vacuum sensing and controls • Light end-of-arm tooling • Simple filtration options • Some loss in system performance due to distance Contact your distributor for further information SUCTION CUPS / GRIPPERS INTRODUCTION SUCTION CUP CATEGORY FEATURES APPLICATIONS • Unique modular suction cup concept with individually optimised lips and bellows for Smooth, textured, uneven gripping, lifting and height compensation on almost any kind of object. -

High-Throughput Microcircuit Analysis of Individual Human Brains Through
bioRxiv preprint doi: https://doi.org/10.1101/639328; this version posted May 18, 2019. The copyright holder for this preprint (which was not certified by peer review) is the author/funder, who has granted bioRxiv a license to display the preprint in perpetuity. It is made available under aCC-BY 4.0 International license. 1 High-throughput microcircuit analysis of individual human brains 2 through next-generation multineuron patch-clamp 3 Yangfan Peng1,2, Franz X. Mittermaier1, Henrike Planert1, Ulf C. Schneider3, Henrik Alle1, Jörg 4 R.P. Geiger1 5 1Institute of Neurophysiology, Charité – Universitätsmedizin Berlin, Germany 6 2Department of Neurology, Charité – Universitätsmedizin Berlin, Germany 7 3Department of Neurosurgery, Charité – Universitätsmedizin Berlin, Germany 8 Abstract 9 Comparing neuronal microcircuits across different brain regions, species and individuals can 10 reveal common and divergent principles of network computation. Simultaneous patch-clamp 11 recordings from multiple neurons offer the highest temporal and subthreshold resolution to 12 analyse local synaptic connectivity. However, its establishment is technically complex and the 13 experimental performance is limited by high failure rates, long experimental times and small 14 sample sizes. We introduce an in-vitro multipatch setup with an automated pipette pressure 15 and cleaning system facilitating recordings of up to 10 neurons simultaneously and sequential 16 patching of additional neurons. We present hardware and software solutions that increase the 17 usability, speed and data throughput of multipatch experiments which allowed probing of 150 18 synaptic connections between 17 neurons in one human cortical slice and screening of over 19 600 connections in tissue from a single patient. -

DOD MIL-STD 1330D Download
INCH-POUND MIL-STD-1330D(SH) 20 September 1996 SUPERSEDING MIL-STD-1330C(SH) 1 February 1985 (See 6.6) DEPARTMENT OF DEFENSE STANDARD PRACTICE FOR PRECISION CLEANING AND TESTING OF SHIPBOARD OXYGEN, HELIUM, HELIUM-OXYGEN, NITROGEN, AND HYDROGEN SYSTEMS Ú AMSC FSC 4730 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. MIL-STD-1330D(SH) 20 September 1996 FOREWORD 1. This standard is approved for use by the Naval Sea Systems Command, Department of the Navy, and is available for use by all Departments and Agencies of the Department of Defense. 2. This military standard is for use by naval activities and private firms performing services as prime or sub-contractors for Naval Sea Systems Command. 3. Beneficial comments (recommendations, additions, deletions) and any pertinent data which may be of use in improving this document should be addressed to: Commander, SEA 03R42, Naval Sea Systems Command, 2531 Jefferson Davis Highway, Arlington, VA 22242-5160, by using the self-addressed Standardization Document Improvement Proposal (DD Form 1426) appearing at the end of this document or by letter. ii MIL-STD-1330D(SH) 20 September 1996 CONTENTS PARAGRAPH PAGE 1. SCOPE..................................................... 1 1.1 Scope.................................................... 1 1.2 Applicability............................................ 1 2. APPLICABLE DOCUMENTS...................................... 2 2.1 General.................................................. 2 2.2 Government documents..................................... 2 2.2.1 Specifications, standards, and handbooks................. 2 2.2.2 Other Government documents, drawings, and publications... 3 2.3 Non-Government publications.............................. 3 2.4 Order of precedence...................................... 4 3. DEFINITIONS............................................... 4 3.1 Aqueous cleaning solution................................ 4 3.2 Blue line................................................ 4 3.3 Clean................................................... -

Multi-Stage Steam Jet Vacuum Systems Technical Vacuum up to 0.05 Mbar Multi-Stage Steam Jet Vacuum Systems Ideal Solutions for Any Application
Multi-stage steam jet vacuum systems Technical vacuum up to 0.05 mbar Multi-stage steam jet vacuum systems Ideal solutions for any application There is virtually no limit to where multi-stage steam jet vacuum systems in the processing industry can be used. Depending on the application, a wide range of variants of these sys- tems are applied. The intermediate condensers are typical features of virtually any multi- stage steam jet vacuum system. The number of booster ejectors (1-, 2- or 3-stage) before the first intermediate condenser depends on the process vacuum required, the cooling water conditions and the motive steam pressure. Sometimes a pre-condenser can be used to en- hance the vacuum system. The design of the intermediate condensers determines the entrai- ned steam proportion with the departing inert gas. This mixture is compressed further within the next following jet ejector stage. Körting Hannover AG has a worldwide leading position in designing and manufacturing multi- stage steam jet vacuum systems. The company has been developing and supplying technical vacuum equipment since it was founded in 1871 by Ernst Körting. By providing process- related designs and reflecting technical and financial parameters, an enhanced system is developed for any application. The design of Körting steam jet vacuum ejectors is based on particularly thorough characteristic diagrams developed on in- house test rigs over several decades. Until today there are still no theoretical or nu- merical calculation methods for designing steam jet vacuum ejectors. The high quality of Körting’s in-house design data base is crucial in order to ensure that the design of the steam jet vacuum ejectors is safe and economical. -

High-Throughput Microcircuit Analysis of Individual Human Brains Through Next- Generation Multineuron Patch-Clamp
TOOLS AND RESOURCES High-throughput microcircuit analysis of individual human brains through next- generation multineuron patch-clamp Yangfan Peng1,2*, Franz Xaver Mittermaier1, Henrike Planert1, Ulf Christoph Schneider3, Henrik Alle1, Jo¨ rg Rolf Paul Geiger1* 1Institute of Neurophysiology, Charite´ – Universita¨ tsmedizin Berlin, Berlin, Germany; 2Department of Neurology, Charite´ – Universita¨ tsmedizin Berlin, Berlin, Germany; 3Department of Neurosurgery, Charite´ – Universita¨ tsmedizin Berlin, Berlin, Germany Abstract Comparing neuronal microcircuits across different brain regions, species and individuals can reveal common and divergent principles of network computation. Simultaneous patch-clamp recordings from multiple neurons offer the highest temporal and subthreshold resolution to analyse local synaptic connectivity. However, its establishment is technically complex and the experimental performance is limited by high failure rates, long experimental times and small sample sizes. We introduce an in vitro multipatch setup with an automated pipette pressure and cleaning system facilitating recordings of up to 10 neurons simultaneously and sequential patching of additional neurons. We present hardware and software solutions that increase the usability, speed and data throughput of multipatch experiments which allowed probing of 150 synaptic connections between 17 neurons in one human cortical slice and screening of over 600 connections in tissue from a single patient. This method will facilitate the systematic analysis of microcircuits -

Getinge #67 400-500 HC Product Spec.Indd
CUSTOMER: REFERENCE: 400 HC & 500 HC SERIES GRAVITY & VACUUM/GRAVITY STEAM STERILIZERS FOR HEALTHCARE APPLICATIONS PRODUCT SPECIFICATION PRODUCT Both the 400HC Series and 500HC Series Sterilizers consist of two models. The 422HC and 522HC Gravity Steam Sterilizers employ gravity/downward displacement with positive pulse con- ditioning and the 433HC and 533HC Vacuum/Gravity Steam Sterilizers employ both gravity/downward displace ment with pos- itive pulse conditioning and pressure/vacuum pulsing for dynamic air removal. Up to 22 cycles can be easily accessed in two easy steps. Custom cycle names can be des ignated for each cycle and re-ordered for easy access. All cycle phases are sequenced and monitored by the control system, providing both audible and visual notifi cation of deviation from key operating parameters. APPLICATION For general-purpose gravity or vacuum steam sterilization of ELECTRICAL SUPPLY - Sterilizer hospital instruments and supplies. The selectable temperature 120V 1Ph 50/60 Hz range is from 230°F to 275°F (110°C to 135°C) and from 219°F 230V 3Ph 50/60 Hz to 275°F (104°C to 135°C) for liquid cycles. Applica tions include wrapped and unwrapped porous and non porous hard goods, VACUUM SOURCE/PIPING gowns or towel packs and liquids in self-venting or unsealed con- Ejector with copper/brass piping and valves tainers. The liquid exhaust is microcomputer controlled for linear Ejector with stainless steel piping to chamber and jacket and consistent liquid cool down, programmable within a specifi ed range. 3-Phase vacuum -

Basic Pad ZP Series Compact Type ZP3 Series
Vacuum Pad Series Basic Pad ZP Series p. 26 Pad diameter ø2, ø4, ø6, ø8, ø10, ø13, ø16, ø20, ø25, ø32, ø40, ø50 Pad form Flat type, Flat type with ribs, Bellows type, Thin flat type, Thin flat type with ribs, Deep type Mounting Male thread, Female thread Vacuum inlet direction Vertical, Lateral Vacuum inlet Male thread, Female thread, One-touch fitting, Barb fitting Buffer Without, With [Buffer stroke [mm]: 6, 10, 15, 20, 25, 30, 40, 50] Ball joint Without, With (Flat type only) 12 sizes, 6 types of pad forms The mounting bracket can be selected according to the application. Compact Type ZP3 Series p. 132 Pad diameter ø1.5, ø2, ø3.5, ø4, ø6, ø8, ø10, ø13, ø16 Pad form Flat type, Flat type with groove, Bellows type, Bellows type with ribs Mounting Male thread, Female thread Vacuum inlet direction Vertical, Lateral Vacuum inlet Male thread, Female thread, One-touch fitting, Barb fitting Buffer Without, With [Buffer stroke [mm]: 3, 6, 10, 15, 20] Overall length shortened For the flat type (Pad diameter: ø2) Actual size Actual size 12 19.5 mm mm 8.5 mm 3 mm ZP3 ZP ZP3 ZP Front matter 1 Oval Pad ZP/ZP2 Series p. 166 Pad size 2 x 4, 3.5 x 7, 4 x 10, 4 x 20, 4 x 30, 5 x 10, 5 x 20, 5 x 30, 6 x 10, 6 x 20, 6 x 30, 8 x 20, 8 x 30 Pad form Oval flat type Mounting Male thread, Female thread Vacuum inlet direction Vertical, Lateral Vacuum inlet Male thread, Female thread, One-touch fitting, Barb fitting ZP: 6, 10, 15, 20 Buffer Without, With Buffer stroke [mm] ZP2 : 10, 20, 30, 40, 50 For rectangular, vertically long, and horizontally long workpieces ZP Series ZP2 Series High Rigidity Pad ZP3E Series p. -

Vacuum Ejector Performance Break
Vacuum ejector performance break Understanding vacuum ejector performance is the key to maintaining reliability and distillate yields. A low VGO yield may result from a breaking ejector system, but bypassing a fouled inter-condenser can restore lost yield Norm Lieberman Process Improvement Engineering Edward Hartman and Daryl Hanson Process Consulting Services Inc oor ejector system per- formance continues to Preduce vacuum gas oil (VGO) product yield due t o design and reliability problems (Figure 1). Since poor performance increases column operating pressure, profit is significantly reduced too, especially during high margin periods. Although there are many potential trouble spots in multi-stage or parallel multi- stage ejector systems, this article focuses on the event called “breaking”. Experi- ence shows that breaking can easily reduce VGO yield by 2–4% on crude charge. N o r m a l l y, changes in the first-stage ejector system’s suction pressure are predictable, with gas loads based on the manufacturer’s certified performance curv e . H o w e v e r, when the first- stage ejector’s operation breaks, it no longer operates Figure 1 Vacuum ejector system on this curve and its suction pressure increases abruptly. Conse- injection, as well as “wasting” time in q u e n t l y, pressure in the vacuum column meetings or performing computer flash zone goes up rapidly, the VGO simulations, in reality it is field product yield drops and the vacuum measurements and the application of tower bottom (VTB) rate increases. The fundamental vacuum ejector system amount of VGO yield loss depends on principles that can improve operations the pressure in the vacuum column, and increase profitability. -

Adsorption, Adsorbents and Catalysts Based on Them
MINISTRY OF EDUCATION AND SCIENCE OF UKRAINE NATIONAL TECHNICAL UNIVERSITY OF UKRAINE «IGOR SIKORSKY KYIV POLYTECHNIC INSTITUTE» I. M. Ivanenko, T. A. Dontsova, Yu. M. Fedenko ADSORPTION, ADSORBENTS AND CATALYSTS BASED ON THEM Approved by the Academic Council of National Technical University of Ukraine «Igor Sikorsky Kyiv Polytechnic Institute» as Manual for Master students of the specialty 161 «Chemical technologies and engineering» specialization «Chemical technologies of inorganic substances and water purification» Kyiv Igor Sikorsky Kyiv Polytechnic Institute 2019 2 Reviewers: Chygyrynets O.E., Dr. Sci., Prof. Sabliy L.A., Dr. Sci., Prof. Responsible editor Kontsevoy A.L., PhD, Assoc. Prof. The Grief is provided by the Academic Council of National Technical University of Ukraine "Igor Sikorsky Kyiv Polytechnic Institute" (protocol № 11 from 09.12.2019) Electronic educational edition Ivanenko Iryna Mykolaivna, PhD, Assoc. Prof. Dontsova Tetiana Anatoliivna, PhD, Assoc. Prof. Fedenko Yurii Mykolayovich, PhD ADSORPTION, ADSORBENTS AND CATALYSTS BASED ON THEM Adsorption, Adsorbents and Catalysts Based on Them [Electronic resource]: Manual for Master students of the specialty 161 Chemical technologies and engineering specialization «Chemical technologies of inorganic substances and water purification» / Igor Sikorsky Kyiv Polytechnic Institute; redactors: І.M. Ivanenko, Т.А. Dontsova, Yu.M. Fedenko. – Electronic text data (1 file: 3,43 Mbyte). – Кyiv : Igor Sikorsky Kyiv Polytechnic Institute, Faculty of Chemical Technology, 2019. – 256 p. The material of this manual is set out in accordance with The Program of the discipline «Adsorption, Adsorbents and Catalysts Based on Them», covers and reveals most of the lecture material. It can have used by students at preparation to practical and laboratory classes, at performance individual and independent kinds of works, and also at preparation to control works and examination. -

Vacuum Automation
VACUUM AUTOMATION 5.0 Improve your productivity and energy efficiency Our Mission The Piab mission is to increase productivity for industrial customers and provide energy saving solutions by promoting our superior technology universally. 3 Index Piab Vacuum Academy 5 Vacuum pumps/generators 85 Introduction 6 Vacuum cartridges / custom integration 86 Expressions and units 10 Inline 96 Vacuum pumps 12 Compact/stackable 102 Vacuum system calculations 16 Combined pump and gripper 121 Optimizing controls 18 Standard 136 Suction cups 19 Extra safety 164 Thread systems 20 Chemical resistant 170 Tables 21 Applications and solutions 24 Pump accessories 177 Selection guide - Accessories 178 Suction cups 29 Vacuum switches 180 piGRIP® 30 Valves 184 Flat family (F) 42 Regulators 188 Flat Concave family (FC) 46 Silencers 190 Bellows family (B) 49 Vacuum filters 191 Multibellows family (BX/BL) 54 Other 192 Deep family (D) 58 Universal family (U) 60 PMAT 195 Oval Bellows family (OB) 63 Oval Flat family (OF) 65 Piab Modular Automation Tooling 196 Oval Concave family (OC) 67 Connections to main frame of the end-effector 198 Swivel arms 199 Function attachments 200 Suction cup accessories 71 Accessories 202 Selection guide – Accessories 72 PMAT configurable products 203 Mounting elements 74 Level compensators 75 Warranties 204 Ball joints 77 Suction cup valves 78 Suction cup fittings 80 Other 82 5 Piab Vacuum Academy Piab Vacuum Academy 5 Introduction 6 Expressions and units 10 Vacuum pumps 12 Vacuum system calculations 16 Optimizing controls 18 Suction cups 19 Thread systems 20 Tables 21 Applications and solutions 24 6 Piab Vacuum Academy – Introduction 1951 In 1951, the company took its name from its first product, an innovative compass that simplified the work for designers and draftsmen. -

United States Patent 19 11 Patent Number: 5,753,190 Haseltine Et Al
IIIUS005753190A United States Patent 19 11 Patent Number: 5,753,190 Haseltine et al. 45 Date of Patent: May 19, 1998 54 WACUUM SYSTEM FOR CONTROLLING FOREIGN PATENT DOCUMENTS PRESSURE INA POLYESTER PROCESS O685502A2 12/1995 European Pat. Off. 158786 C 2/1983 German Dem. Rep. (75) Inventors: Douglas M. Haseltine; Thomas L. 2809113 A1 10/1979 Germany. Yount; Jimmy L. Ryans, all of 56-59842. A 5/1981 Japan . Kingsport, Tenn. 788404 7/1995 Japan. 73) Assignee: Eastman Chemical Company, OTHER PUBLICATIONS Kingsport, Tenn. Patent Abstracts of Japan, vol. 10, No. 321, C-382, abstract of JPA61-130336 (Toyobo Co Ltd), 18 Jun. 1986. 21) Appl. No.: 505,428 Patent Abstracts of Japan, vol. 10, No. 4, C-322, abstract of 22 Filed: Jul. 21, 1995 JPA60-163918 (Toyo Boseki K.K.), 26 Aug. 1985. Patent Abstracts of Japan, vol. 10, No. 194, C-358, abstract Related U.S. Application Data of JPA61-37819 (Toray Ind Inc), 22 Feb. 1986. Ryans, J. L. and D. L. Roper, Process Wacuum System 62 Division of Ser. No. 401,375, Mar. 9, 1995, Pat. No. Design & Operation, McGraw-Hill Book Company, New 5,466,765. York, 1986, pp. 230-237. 51 Int. Cl. .............. C08F 2/00 Primary Examiner-Christopher Kim (52) U.S. Cl. ... ... 422/131; 422/134; 203/73; Attorney, Agent, or Firm-Karen A. Harding; Harry J. 203/77 Gwinnell 58) Field of Search ..................................... 422/131, 134; 526/65, 71; 528/272,308.3,308.5; 203/73. 57 ABSTRACT 77, 87 The present invention discloses a polymerization system having at least two reaction chambers wherein vacuum is 56) References Cited used to remove vapors therefrom comprising a single U.S.