Article the Impact of Eclipsing GNSS Satellites on the Precise Point Positioning
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Technical Activities 1983 Center for Basic Standards
Technical Activities 1983 Center for Basic Standards U S. DEPARTMENT OF COMMERCE National Bureau of Standards National Measurement Laboratory Center for Basic Standards Washington, DC 20234 November 1983 Final Issued January 1984 Prepared for: U S. DEPARTMENT OF COMMERCE National Bureau of Standards Qc /ashington, DC 20234 1 00 -USk p p p I p p V i I » i » i i » i [i fi n NBSIR 83-2793 TECHNICAL ACTIVITIES 1983 CENTER FOR BASIC STANDARDS Karl G. Kessler, Director U.S. DEPARTMENT OF COMMERCE National Bureau of Standards National Measurement Laboratory Center for Basic Standards Washington, DC 20234 November 1 983 Final Issued January 1984 Prepared for: U.S. DEPARTMENT OF COMMERCE National Bureau of Standards Washington, DC 20234 U.S. DEPARTMENT OF COMMERCE, Malcolm Baidrige. Secretary NATIONAL BUREAU OF STANDARDS, Ernest Ambler, Director TABLE OF CONTENTS Part II Page Technical Activities: Introduction 1 Quantum Metrology Group 2 Electricity Division 21 Temperature and Pressure Division 81 Length and Mass Division 123 Time and Frequency Division 135 Quantum Physics Division 187 i i I 1 I II II i li 1 1 INTRODUCTION This book is Part II of the 1983 Annual Report of the Center for Basic Standards and contains a summary of the technical activities of the Center for the period October 1, 1982 to September 30, 1983. The Center is one of the five resources and operating units in the National Measurement Laboratory. The summary of activities is organized in six sections, one for the technical activities of the Quantum Metrology Group, and one each for the five divisions of the Center. -

448 Part 2—Frequency Alloca- Tions and Radio Treaty
Pt. 2 47 CFR Ch. I (10–1–10 Edition) comments and following consultation with llllllllllllllllllllllll the SHPO/THPO, potentially affected Indian Chairman tribes and NHOs, or Council, where appro- Date lllllllllllllllllllll priate, take appropriate actions. The Com- Advisory Council on Historic Preservation mission shall notify the objector of the out- come of its actions. llllllllllllllllllllllll Chairman XII. AMENDMENTS Date lllllllllllllllllllll The signatories may propose modifications National Conference of State Historic Pres- or other amendments to this Nationwide ervation Officers Agreement. Any amendment to this Agree- llllllllllllllllllllllll ment shall be subject to appropriate public Date lllllllllllllllllllll notice and comment and shall be signed by the Commission, the Council, and the Con- [70 FR 580, Jan. 4, 2005] ference. XIII. TERMINATION PART 2—FREQUENCY ALLOCA- TIONS AND RADIO TREATY MAT- A. Any signatory to this Nationwide Agreement may request termination by writ- TERS; GENERAL RULES AND REG- ten notice to the other parties. Within sixty ULATIONS (60) days following receipt of a written re- quest for termination from a signatory, all Subpart A—Terminology other signatories shall discuss the basis for the termination request and seek agreement Sec. on amendments or other actions that would 2.1 Terms and definitions. avoid termination. B. In the event that this Agreement is ter- Subpart B—Allocation, Assignment, and minated, the Commission and all Applicants Use of Radio Frequencies shall comply with the requirements of 36 CFR Part 800. 2.100 International regulations in force. 2.101 Frequency and wavelength bands. XIV. ANNUAL REVIEW 2.102 Assignment of frequencies. 2.103 Federal use of non-Federal fre- The signatories to this Nationwide Agree- quencies. -

Report ITU-R SM.2451-0 (06/2019)
Report ITU-R SM.2451-0 (06/2019) Assessment of impact of wireless power transmission for electric vehicle charging on radiocommunication services SM Series Spectrum management ii Rep. ITU-R SM.2451-0 Foreword The role of the Radiocommunication Sector is to ensure the rational, equitable, efficient and economical use of the radio- frequency spectrum by all radiocommunication services, including satellite services, and carry out studies without limit of frequency range on the basis of which Recommendations are adopted. The regulatory and policy functions of the Radiocommunication Sector are performed by World and Regional Radiocommunication Conferences and Radiocommunication Assemblies supported by Study Groups. Policy on Intellectual Property Right (IPR) ITU-R policy on IPR is described in the Common Patent Policy for ITU-T/ITU-R/ISO/IEC referenced in Resolution ITU- R 1. Forms to be used for the submission of patent statements and licensing declarations by patent holders are available from http://www.itu.int/ITU-R/go/patents/en where the Guidelines for Implementation of the Common Patent Policy for ITU-T/ITU-R/ISO/IEC and the ITU-R patent information database can also be found. Series of ITU-R Reports (Also available online at http://www.itu.int/publ/R-REP/en) Series Title BO Satellite delivery BR Recording for production, archival and play-out; film for television BS Broadcasting service (sound) BT Broadcasting service (television) F Fixed service M Mobile, radiodetermination, amateur and related satellite services P Radiowave propagation RA Radio astronomy RS Remote sensing systems S Fixed-satellite service SA Space applications and meteorology SF Frequency sharing and coordination between fixed-satellite and fixed service systems SM Spectrum management Note: This ITU-R Report was approved in English by the Study Group under the procedure detailed in Resolution ITU-R 1. -

U-Blox 6 GPS/GLONASS/QZSS Receiver Description Including Protocol Specification V14
u-blox 6 GPS/GLONASS/QZSS Receiver Description Including Protocol Specification V14 Abstract The Receiver Description Including Protocol Specification describes the firmware features, specifications and configuration for u-blox 6 high performance positioning modules for GPS/GLONASS/QZSS. The Receiver Description provides an overview and conceptual details of the supported features. The Protocol Specification details version 14 of the NMEA and UBX protocols and serves as a reference manual. www.u-blox.com Document Information Title u-blox 6 GPS/GLONASS/QZSS Receiver Description Subtitle Including Protocol Specification V14 Document type Manual Document number GPS.G6-SW-12013 60119, 5 Jul 2012 Document status Protocol version 14.00 (Public Release) This document and the use of any information contained therein, is subject to the acceptance of the u-blox terms and conditions. They can be downloaded from www.u-blox.com. u-blox makes no warranties based on the accuracy or completeness of the contents of this document and reserves the right to make changes to specifications and product descriptions at any time without notice. u-blox reserves all rights to this document and the information contained herein. Reproduction, use or disclosure to third parties without express permission is strictly prohibited. Copyright © 2012, u-blox AG. GPS.G6-SW-12013 Public Release Page ii Table of Contents Receiver Description .................................................................................................................................... 1 -

Network Time Protocol (Version 2) Specification and Implementation
Network Working Group David L. Mills Request for Comments: 1119 University of Delaware Obsoletes: RFC-1059, RFC-958 September 1989 Network Time Protocol (Version 2) Specification and Implementation Status of this Memo This document describes the Network Time Protocol (NTP), specifies its formal structure and summarizes information useful for its implementation. NTP provides the mechanisms to synchronize time and coordinate time distribution in a large, diverse internet operating at rates from mundane to lightwave. It uses a returnable-time design in which a distributed subnet of time servers operating in a self-organizing, hierarchical-master-slave configuration synchronizes local clocks within the subnet and to national time standards via wire or radio. The servers can also redistribute reference time via local routing algorithms and time daemons. This is an Internet Standard Recommended Protocol. Distribution of this memo is unlimited. Keywords: network clock synchronization, standard time distribution, fault-tolerant architecture, maximum-likelihood estimation, disciplined oscillator, internet protocol, formal specification. Mills Page i RFC-1119 Network Time Protocol September 1989 Table of Contents 1. Introduction . 1 1.1. Related Technology . 2 2. System Architecture . 3 2.1. Implementation Model . 4 2.2. Network Configurations . 5 2.3. The NTP Timescale . 7 2.4. The NTP Calendar . 8 2.5. Time and Frequency Dissemination . 10 3. Network Time Protocol . 11 3.1. Data Formats . 11 3.2. State Variables and Parameters . 12 3.2.1. Common Variables . 12 3.2.2. System Variables . 14 3.2.3. Peer Variables . 16 3.2.4. Packet Variables . 17 3.2.5. Clock Filter Variables . 17 3.2.6. -

Cobox Network Time Server
CoBox Network Time Server Installation Guide CONTENTS 1 DESCRIPTION OF THE NETWORK TIME SERVER (NTS) 2 RELIABLE CLOCK SOURCES GLOBAL POSITIONING SATELLITE (GPS) SYSTEM .................................. 2-1 DCF-77 LF RADIO TRANSMITTER......................................................... 2-1 WWVB RADIO TRANSMITTER .............................................................. 2-1 3 HARDWARE INSTALLATION REQUIREMENTS CONTROLLER........................................................................................ 3-1 ANTENNA............................................................................................. 3-1 ANTENNA CABLE.................................................................................. 3-1 4 CONTROLLER SETUP NETWORK CONFIGURATION .................................................................. 4-1 FACTORY IP ADDRESS .......................................................................... 4-1 INITIAL IP ADDRESS SETTING ............................................................... 4-1 SERIAL CONFIGURATION....................................................................... 4-2 CONFIGURATION PARAMETERS ............................................................. 4-3 BASIC PARAMETERS ............................................................................. 4-3 Ethernet Interface ......................................................................... 4-3 Token Ring Interface .................................................................... 4-3 Locally Administered Hardware Address ..................................... -

NIST Research Reports
and Technology A111D3 fil3flD - TECH RX^ ^^^^ STANDAr£& NIST 380 PUBLICATIONS A11 103081 S"uiripVSNE 1989 C. C.1 N>ST- On the cover: The supersonic inert gas metal atomizer (SIGMA) is used in an intelligent processing of materi- als program at NIST. The cooperative program is aimed at automating the production of rapidly solidified metal powders. From left to right are Frank Biancaniello, James Ingram of Hoeganaes Corp., and Stephen Bidder. See article on page 10. National institute of Standards and Teclinology 0C ^00 US'? 7 o7 Research Reports U.S. DEPARTMENT OF COMMERCE Research Update Robert A. Mosbacher, Secretary National Institute of Standards and Technology Computer Security: Protection Is the Name of the Game 5 Raymond G. Kammer, Acting Director National Institute of Standards 'Standard Crack' Helps Detect Metal Fatigue in Aircraft and Technology 9 Gaithersburg, MD 20899 301/975-2000 Boulder, CO 80303 Building Quality into Advanced Materials during Processing 10 303/497-3000 June 1989 'HIPing': From Metal Powders to Reliable Materials 12 NIST Special Publication 765 Prepared by the Public Information Division Exploring Earth's Formation 14 A903 Administration Building National Institute of Standards and Technology Gaithersburg, MD 20899 NIST: Helping Industry To Compete 16 301/975-2762 Any mention of commercial products Tracking Time 20 is for information only, it does not imply recommendation or endorsement by the National Institute of Standards and Technology nor does it imply that Movies Reveal Secrets of Materials 24 the products mentioned are necessarily the best available for the purpose. Technique Sterilizes Clinical Instruments in Seconds 26 The National Bureau of Standards became the National Institute of Standards and Technology on August 1988, under the 23, Can Smoke Control Systems Save Lives and Property? 28 Omnibus Trade and Competitiveness Act. -

2002 Physics Laboratory
SUPPORTING U.S. INDUSTRY, GOVERNMENT, AND THE SCIENTIFIC COMMUNITY BY PROVIDING MEASUREMENT SERVICES AND RESEARCH FOR ELECTRONIC, OPTICAL, AND RADIATION TECHNOLOGY Nisr National Institute of Standards and Technology Technology Administration U.S. Department of Commerce Physics Laboratory at a Glance 1 Director's Message 2 Electron and Optical Physics Division 4 Atomic Physics Division 12 Optical Technology Division 20 Ionizing Radiation Division 28 Time and Frequency Division 36 Quantum Physics Division 44 Office of Electronic Commerce in 52 Scientific and Engineering Data Honors and Awards 54 Physics Laboratory Resources 63 Organizational Chart 64 PL VISION Quantum Physics Division: to provide - Spectral Irradiance and Radiance fundamental understandings of nano-, Responsivity Calibrations Using Preeminent performance in measurement Uniform Sources (SIRCUS) Facility bio-, and quantum optical systems in part- science, technology, and services. nership with the University of Colorado - Synchrotron Ultraviolet Radiation Facility (SURF HI) at JILA. PL MISSION - W.M. Keck Optical Measurement Office of Electronics Commerce in Laboratory The mission of the NIST Physics Laboratory Scientific and Engineering Data: to is to support U.S. industry, government, coordinate and facilitate the electronic dis- Standard time dissemination services: and the scientific community by providing semination of information via the Internet. measurement services and research for - Radio stations WWV, VWWH, electronic, optical, and radiation technology and WWVB -
From Sundials to Atomic Clocks: Understanding Time and Frequency
e000MENT RESUEE ED 159 058 SE 024 911 . , p AUTHOR Jpspersen, James; Fitz-Randolph, Jane , TITLE Prot!). Sundiadeto Atomic Clocks: Understanding Tide aqd 'Frequency. INSTITUTION NAional Bureau of Standards (DOC), Washingt, n D.C, . REPORT NO 'NBS-Monogr-155 . At PUB-DATE Dec 77 )7/ NOTE A180p.; Occasional blue print may _.)not reproduce well; J Cartoons on pages 8, 15,16,.-51, 62, 64, 68, 71, 75, 94, 109, 116, 121, 162 deleted dine to copyright restrictions " AVAILABLE FROM Superintendent of Documents, ths;-Governiprit Printing )Office, W hington, D.C.20'402 (Stock Number 003-003-0r650-1;-$4.00) 1 EDRS PRICE MF-$0.83 HC-$10.03 Plus Postage. DESCRIPTORS *Instructional Materials; *Mathematical Applications; *Measurement; Post'SecOndary MI:cation; Reference Materials; *Time- IDENTIFIERS . *Clocks; Timekeeping e- A4 ABSTRACT An introduction to time, timekeeping, and .thee uses of time information, especially in the scientific and technical areas, are offered in this book foi laymen. Historical and p,bilosophical aspects of'time and timekeeping are included. The scie tific-thoug t -on time has been simplified. Contents include: the na u = of time time and frequency4 early man-made clocks, quality f ;Ito ern clocks (quartz, atomic, etc.) modern watches -fetettli- c, quartz-crystal, etc.), time scales, the correct tim i'time signals, standard t4ime, applications oftime, time and mathematics, time and physics, time and astronomy time and automation, time as ,information, and the future of time. (MP) f a a , . *********************************************************************** * ,Reproductions supplied by EDR the best that can. be made *, * , ;2_, frOm the iginal d cument.' , * **V0*-*********44********************* * * * *, ** * * * * # * * * ** * * * * * * * ** 11D5-: ofixqq, 3 X MS.,;,41)14 ATOMIC dILFOCIIK RSTAM U S DEPARTMENT OF HEALTH, FRE OE EDUCATION I WELFARE NATIONAL INSTITUTEOF EDUCATION THIS DOCUMENT HAS BEEN REPRO-' DUCED EXACTLYAS RECEIVED THE PERSON OR FROM ATING IT POINTSORGANIZATION ORIGIN. -

376 Part 2—Frequency Alloca
Pt. 2 47 CFR Ch. I (10–1–02 Edition) state therein the concurrence or nonconcur- Subpart E—Distress, Disaster, and rence of said cooperating committee in the Emergency Communications decision or order of said Federal Commis- sion. 2.401 Distress messages. 2.402 Control of distress traffic. CONSTRUCTION HEREOF IN CERTAIN RESPECTS 2.403 Retransmission of distress message. EXPRESSLY PROVIDED 2.404 Resumption of operation after dis- It is understood and provided that no State tress. or States shall be deprived of the right of 2.405 Operation during emergency. participation and cooperation as herein- 2.406 National defense; free service. before provided because of nonmembership in 2.407 National defense; emergency author- the association. With respect to any such ization. State or States, all negotiations herein spec- ified to be carried on between the Federal Subparts F–G [Reserved] Commission and any officer of such associa- tion shall be conducted by the Federal Com- Subpart H—Prohibition Against mission directly with the chairman of the Eavesdropping commission of such State or States. 2.701 Prohibition against use of a radio de- [28 FR 12462, Nov. 22, 1963, as amended at 29 vice for eavesdropping. FR 4801, Apr. 4, 1964] Subpart I—Marketing of Radiofrequency PART 2—FREQUENCY ALLOCA- Devices TIONS AND RADIO TREATY MAT- 2.801 Radiofrequency device defined. TERS; GENERAL RULES AND REG- 2.803 Marketing of radio frequency devices ULATIONS prior to equipment authorization. 2.807 Statutory exceptions. Subpart A—Terminology 2.811 Transmitters operated under part 73 of this chapter. Sec. 2.813 Transmitters operated in the Instruc- 2.1 Terms and definitions. -

VLF and LF Time Synchronization Techniques by Terry Richard Donich
VLF and LF time synchronization techniques by Terry Richard Donich A thesis submitted to the Graduate Faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY in Electrical Engineering Montana State University © Copyright by Terry Richard Donich (1968) Abstract: A time synchronization-technique with an error tolerance of ± 1 μsec is presented. The technique involves the use of both a VLF and a IF channel. Tests were made to determine the phase stability of the locally received 20 kHz transmission (WWVL) from the National Bureau of Standards. The phase comparison data between the WWVL signal and the local frequency standard was recorded from a VLF receiver by the Montana State University Data Acquisition System. Statistical regression techniques were used to analyze the phase comparison data. A second order polynomial which is a characteristic of the local crystal controlled frequency standard compared to an absolute reference, was subtracted from the data. The resulting error had a standard deviation of less than 1.5 μsec. Thus an axis crossing of the received 20 kHz signal could be used to time synchronize two clocks with an error tolerance of ± 1 or 2 μsec. In order to identify the correct axis crossing of the 20 kHz signal, the local clock would have to be previously time synchronized with an error tolerance of ± 23 μsec and the actual channel time delay would have to be measured. The polynomial computed from the phase comparison data can be used to correct the shifting of the local clock's "tick pulse" relative to the NBS reference clock. -
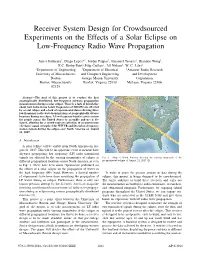
Receiver System Design for Crowdsourced Experiments on the Effects of a Solar Eclipse on Low-Frequency Radio Wave Propagation
Receiver System Design for Crowdsourced Experiments on the Effects of a Solar Eclipse on Low-Frequency Radio Wave Propagation James Fallacara†, Diego Lopez*†, Jordan Pappas†, Emanuel Tavares†, Brandon Wong†, K.C. Kerby-Patel†,Filip Cuˇ ckovˇ †, Jill Nelson‡, W. C. Liles§ †Department of Engineering ‡Department of Electrical §Amateur Radio Research University of Massachusetts and Computer Engineering and Development Boston George Mason University Corporation Boston, Massachusetts Fairfax, Virginia 22030 McLean, Virginia 22106 02125 Abstract—The goal of this project is to conduct the first geographically distributed, low-frequency skywave propagation measurements during a solar eclipse. There is a lack of knowledge about how radio waves below frequencies of 500 kHz are affected by a total eclipse and a lack of experimental data reflecting these low-frequency radio wave transmissions at geographically diverse locations during an eclipse. A low-frequency band receiver system for people across the United States to assemble and use is de- signed, allowing for a crowd-sourced collection of measurements of relative signal strength of the WWVB and Dixon low-frequency station signals during the eclipse over North America on August 21, 2017. A. Introduction A solar eclipse will be visible from North America on Au- gust 21, 2017. This will be an opportune event to measure how skywave propagating, low frequency (LF) radio transmitted signals are affected by the varying magnitudes of eclipse at Fig. 1. Map of North America showing the varying magnitude of the different geographical locations across North America, as seen prognosticated eclipse of August 21, 2017 [2] in Fig. 1. There have been many experiments performed on the effects of a solar eclipse on the propagation of waves in the high frequency (HF) band.