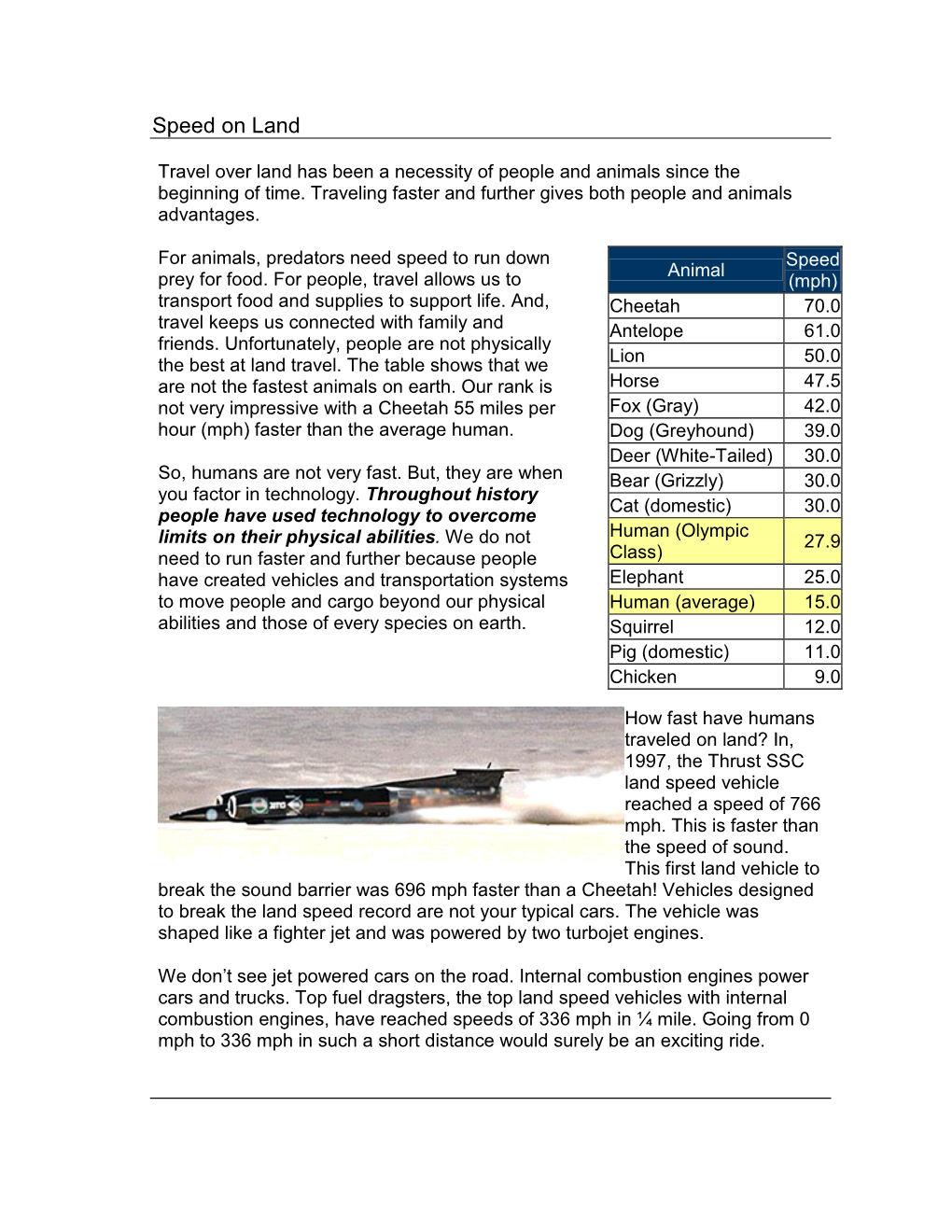
Speed on Land
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Towards Adaptive and Directable Control of Simulated Creatures Yeuhi Abe AKER
--A Towards Adaptive and Directable Control of Simulated Creatures by Yeuhi Abe Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements for the degree of Master of Science in Computer Science and Engineering at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY February 2007 © Massachusetts Institute of Technology 2007. All rights reserved. Author ....... Departmet of Electrical Engineering and Computer Science Febri- '. 2007 Certified by Jovan Popovid Associate Professor or Accepted by........... Arthur C.Smith Chairman, Department Committee on Graduate Students MASSACHUSETTS INSTInfrE OF TECHNOLOGY APR 3 0 2007 AKER LIBRARIES Towards Adaptive and Directable Control of Simulated Creatures by Yeuhi Abe Submitted to the Department of Electrical Engineering and Computer Science on February 2, 2007, in partial fulfillment of the requirements for the degree of Master of Science in Computer Science and Engineering Abstract Interactive animation is used ubiquitously for entertainment and for the communi- cation of ideas. Active creatures, such as humans, robots, and animals, are often at the heart of such animation and are required to interact in compelling and lifelike ways with their virtual environment. Physical simulation handles such interaction correctly, with a principled approach that adapts easily to different circumstances, changing environments, and unexpected disturbances. However, developing robust control strategies that result in natural motion of active creatures within physical simulation has proved to be a difficult problem. To address this issue, a new and ver- satile algorithm for the low-level control of animated characters has been developed and tested. It simplifies the process of creating control strategies by automatically ac- counting for many parameters of the simulation, including the physical properties of the creature and the contact forces between the creature and the virtual environment. -

The History of Speed in Ormond Beach
The History of Speed in Ormond Beach ORMOND BEACH, Fla. - In 1903, the smooth, hard-packed sands of Ormond Beach became a proving ground for automobile inventors and drivers. These first speed tournaments in the US earned Ormond the title “Birthplace of Speed.” Records set here during speed trial tournaments for much of the next eight years would be the first significant marks recorded outside of Europe. Motorcycle and automobile owners and racers brought vehicles that used gasoline, steam and electric engines. They came from France, Germany, and England as well as from across the United States. The Ormond Garage, the first gasoline alley before Indianapolis Speedway, was built in 1905 by Henry Flagler, owner of the Ormond Hotel, to accommodate participating race cars during the beach races. The Ormond Garage would house the drivers and mechanics during the speed time trials. Owners and manufacturers stayed, of course, at Flagler’s Ormond Hotel. Pictured: The Ormond Garage in 1905, with Louis Ross in his steam-powered "Wogglebug" No. 4 and other racers. Tragically, the Ormond Garage caught fire and burned to the ground in 1976, destroying one of auto history’s most important landmarks as well as antique cars owned by local residents who used the Garage as a museum. Sadly, all that remains is a historic marker, in front of SunTrust Bank, built on its ashes on East Granada Boulevard. Racing on Ormond Beach started in 1902. But the city’s famous connection with racing began in 1903 when the Winton Bullet won a Challenge Cup against the Olds Pirate by two-tenths of a second. -

7.6 Moments and Center of Mass in This Section We Want to find a Point on Which a Thin Plate of Any Given Shape Balances Horizontally As in Figure 7.6.1
Arkansas Tech University MATH 2924: Calculus II Dr. Marcel B. Finan 7.6 Moments and Center of Mass In this section we want to find a point on which a thin plate of any given shape balances horizontally as in Figure 7.6.1. Figure 7.6.1 The center of mass is the so-called \balancing point" of an object (or sys- tem.) For example, when two children are sitting on a seesaw, the point at which the seesaw balances, i.e. becomes horizontal is the center of mass of the seesaw. Discrete Point Masses: One Dimensional Case Consider again the example of two children of mass m1 and m2 sitting on each side of a seesaw. It can be shown experimentally that the center of mass is a point P on the seesaw such that m1d1 = m2d2 where d1 and d2 are the distances from m1 and m2 to P respectively. See Figure 7.6.2. In order to generalize this concept, we introduce an x−axis with points m1 and m2 located at points with coordinates x1 and x2 with x1 < x2: Figure 7.6.2 1 Since P is the balancing point, we must have m1(x − x1) = m2(x2 − x): Solving for x we find m x + m x x = 1 1 2 2 : m1 + m2 The product mixi is called the moment of mi about the origin. The above result can be extended to a system with many points as follows: The center of mass of a system of n point-masses m1; m2; ··· ; mn located at x1; x2; ··· ; xn along the x−axis is given by the formula n X mixi i=1 Mo x = n = X m mi i=1 n X where the sum Mo = mixi is called the moment of the system about i=1 Pn the origin and m = i=1 mn is the total mass. -

2010-01-26 Houston Installation Contact Wire1
Installation of Contact Wire (CW) for High Speed Lines - Recommendations Dr.-Ing. Frank Pupke Product Development Metal and Railways IEEE meeting - Houston, 25.01.2010 Frank Pupke 2010-01-25 Content 1. Material properties 2. Tension 3. Levelling Device 4. Examples for installation with levelling device 5. Quality check 6. Different Contact Wires in Europe 7. Recommendations Frank Pupke 2010-01-25 Examples – High speed Cologne- Frankfurt Spain Frank Pupke 2010-01-25 World Record Railway 574,8 km/h with nkt cables products The high-speed train TGV V150 reached with a speed of 574,8 km/h the world land speed record for conventional railed trains on 3 April 2007. The train was built in France and tested between Strasbourg and Paris The trials were conducted jointly by SNCF, Alstom and Réseau Ferré de France The catenary wire was made of bronze, with a circular cross-section of 116 mm2 and delivered by nkt cables. Catenary voltage was increased from 25 kV to 31 kV for the record attempt. The mechanical tension in the wire was increased to 40 kN from the standard 25 kN. The contact wire was made of copper tin by nkt cables and has a cross-section of 150 mm2. The track super elevation was increased to support higher speeds. The speed of the transverse wave induced in the overhead wire by the train's pantograph was thus increased to 610 km/h, providing a margin of safety beyond the train's maximum speed. Frank Pupke 2010-01-25 1. Material Properties - 1 Contact wire drawing: Frank Pupke 2010-01-25 1. -

Annual Report
COUNCIL ON FOREIGN RELATIONS ANNUAL REPORT July 1,1996-June 30,1997 Main Office Washington Office The Harold Pratt House 1779 Massachusetts Avenue, N.W. 58 East 68th Street, New York, NY 10021 Washington, DC 20036 Tel. (212) 434-9400; Fax (212) 861-1789 Tel. (202) 518-3400; Fax (202) 986-2984 Website www. foreignrela tions. org e-mail publicaffairs@email. cfr. org OFFICERS AND DIRECTORS, 1997-98 Officers Directors Charlayne Hunter-Gault Peter G. Peterson Term Expiring 1998 Frank Savage* Chairman of the Board Peggy Dulany Laura D'Andrea Tyson Maurice R. Greenberg Robert F Erburu Leslie H. Gelb Vice Chairman Karen Elliott House ex officio Leslie H. Gelb Joshua Lederberg President Vincent A. Mai Honorary Officers Michael P Peters Garrick Utley and Directors Emeriti Senior Vice President Term Expiring 1999 Douglas Dillon and Chief Operating Officer Carla A. Hills Caryl R Haskins Alton Frye Robert D. Hormats Grayson Kirk Senior Vice President William J. McDonough Charles McC. Mathias, Jr. Paula J. Dobriansky Theodore C. Sorensen James A. Perkins Vice President, Washington Program George Soros David Rockefeller Gary C. Hufbauer Paul A. Volcker Honorary Chairman Vice President, Director of Studies Robert A. Scalapino Term Expiring 2000 David Kellogg Cyrus R. Vance Jessica R Einhorn Vice President, Communications Glenn E. Watts and Corporate Affairs Louis V Gerstner, Jr. Abraham F. Lowenthal Hanna Holborn Gray Vice President and Maurice R. Greenberg Deputy National Director George J. Mitchell Janice L. Murray Warren B. Rudman Vice President and Treasurer Term Expiring 2001 Karen M. Sughrue Lee Cullum Vice President, Programs Mario L. Baeza and Media Projects Thomas R. -

Aerodynamic Development of a IUPUI Formula SAE Specification Car with Computational Fluid Dynamics(CFD) Analysis
Aerodynamic development of a IUPUI Formula SAE specification car with Computational Fluid Dynamics(CFD) analysis Ponnappa Bheemaiah Meederira, Indiana- University Purdue- University. Indianapolis Aerodynamic development of a IUPUI Formula SAE specification car with Computational Fluid Dynamics(CFD) analysis A Directed Project Final Report Submitted to the Faculty Of Purdue School of Engineering and Technology Indianapolis By Ponnappa Bheemaiah Meederira, In partial fulfillment of the requirements for the Degree of Master of Science in Technology Committee Member Approval Signature Date Peter Hylton, Chair Technology _______________________________________ ____________ Andrew Borme Technology _______________________________________ ____________ Ken Rennels Technology _______________________________________ ____________ Aerodynamic development of a IUPUI Formula SAE specification car with Computational 3 Fluid Dynamics(CFD) analysis Table of Contents 1. Abstract ..................................................................................................................................... 4 2. Introduction ............................................................................................................................... 5 3. Problem statement ..................................................................................................................... 7 4. Significance............................................................................................................................... 7 5. Literature review -

Simplified Tools and Methods for Chassis and Vehicle Dynamics Development for FSAE Vehicles
Simplified Tools and Methods for Chassis and Vehicle Dynamics Development for FSAE Vehicles A thesis submitted to the Graduate School of the University of Cincinnati in partial fulfillment of the requirements for the degree of Master of Science in the School of Dynamic Systems of the College of Engineering and Applied Science by Fredrick Jabs B.A. University of Cincinnati June 2006 Committee Chair: Randall Allemang, Ph.D. Abstract Chassis and vehicle dynamics development is a demanding discipline within the FSAE team structure. Many fundamental quantities that are key to the vehicle’s behavior are underdeveloped, undefined or not validated during the product lifecycle of the FSAE competition vehicle. Measurements and methods dealing with the yaw inertia, pitch inertia, roll inertia and tire forces of the vehicle were developed to more accurately quantify the vehicle parameter set. An air ride rotational platform was developed to quantify the yaw inertia of the vehicle. Due to the facilities available the air ride approach has advantages over the common trifilar pendulum method. The air ride necessitates the use of an elevated level table while the trifilar requires a large area and sufficient overhead structure to suspend the object. Although the air ride requires more rigorous computation to perform the second order polynomial fitment of the data, use of small angle approximation is avoided during the process. The rigid pendulum developed to measure both the pitch and roll inertia also satisfies the need to quantify the center of gravity location as part of the process. For the size of the objects being measured, cost and complexity were reduced by using wood for the platform, simple steel support structures and a knife edge pivot design. -
Rocky Mountain Express
ROCKY MOUNTAIN EXPRESS TEACHER’S GUIDE TABLE OF CONTENTS 3 A POSTCARD TO THE EDUCATOR 4 CHAPTER 1 ALL ABOARD! THE FILM 5 CHAPTER 2 THE NORTH AMERICAN DREAM REFLECTIONS ON THE RIBBON OF STEEL (CANADA AND U.S.A.) X CHAPTER 3 A RAILWAY JOURNEY EVOLUTION OF RAIL TRANSPORT X CHAPTER 4 THE LITTLE ENGINE THAT COULD THE MECHANICS OF THE RAILWAY AND TRAIN X CHAPTER 5 TALES, TRAGEDIES, AND TRIUMPHS THE RAILWAY AND ITS ENVIRONMENTAL CHALLENGES X CHAPTER 6 DO THE CHOO-CHOO A TRAIL OF INFLUENCE AND INSPIRATION X CHAPTER 7 ALONG THE RAILROAD TRACKS ACTIVITIES FOR THE TRAIN-MINDED 2 A POSTCARD TO THE EDUCATOR 1. Dear Educator, Welcome to our Teacher’s Guide, which has been prepared to help educators integrate the IMAX® motion picture ROCKY MOUNTAIN EXPRESS into school curriculums. We designed the guide in a manner that is accessible and flexible to any school educator. Feel free to work through the material in a linear fashion or in any order you find appropriate. Or concentrate on a particular chapter or activity based on your needs as a teacher. At the end of the guide, we have included activities that embrace a wide range of topics that can be developed and adapted to different class settings. The material, which is targeted at upper elementary grades, provides students the opportunity to explore, to think, to express, to interact, to appreciate, and to create. Happy discovery and bon voyage! Yours faithfully, Pietro L. Serapiglia Producer, Rocky Mountain Express 2. Moraine Lake and the Valley of the Ten Peaks, Banff National Park, Alberta 3 The Film The giant screen motion picture Rocky Mountain Express, shot with authentic 15/70 negative which guarantees astounding image fidelity, is produced and distributed by the Stephen Low Company for exhibition in IMAX® theaters and other giant screen theaters. -

Control System for Quarter Car Heavy Tracked Vehicle Active Electromagnetic Suspension
Control System for Quarter Car Heavy Tracked Vehicle Active Electromagnetic Suspension By: D. A. Weeks J.H.Beno D. A. Bresie A. Guenin 1997 SAE International Congress and Exposition, Detroit, Ml, Feb 24-27, 1997. PR- 223 Center for Electromechanics The University of Texas at Austin PRC, Mail Code R7000 Austin, TX 78712 (512) 471-4496 January 2, 1997 Control System for Single Wheel Station Heavy Tracked Vehicle Active Electromagnetic Suspension D. A. Weeks, J. H. Beno, D. A. Bresie, and A. M. Guenin The Center for Electromechanics The University of Texas at Austin PRC, Mail Code R7000 Austin TX 78712 (512) 471-4496 ABSTRACT necessary control forces. The original paper described details concerning system modeling and new active suspension con Researchers at The University of Texas Center for trol approaches (briefly summarized in Addendum A for read Electromechanics recently completed design, fabrication, and er convenience). This paper focuses on hardware and software preliminary testing of an Electromagnetic Active Suspension implementation, especially electronics, sensors, and signal pro System (EMASS). The EMASS program was sponsored by cessing, and on experimental results for a single wheel station the United States Army Tank Automotive and Armaments test-rig. Briefly, the single wheel test-rig (fig. 1) simulated a Command Center (TACOM) and the Defense Advanced single Ml Main Battle Tank roadwheel station at full scale, Research Projects Agency (DARPA). A full scale, single wheel using a 4,500 kg (5 ton) block of concrete for the sprung mass mockup of an M1 tank suspension was chosen for evaluating and actual M1 roadwheels and roadarm for unsprung mass. -

Development of Vehicle Dynamics Tools for Motorsports
AN ABSTRACT OF THE DISSERTATION OF Chris Patton for the degree of Doctor of Philosophy in Mechanical Engineering presented on February 7, 2013. Title: Development of Vehicle Dynamics Tools for Motorsports. Abstract approved: ______________________________________________________________________________ Robert K. Paasch In this dissertation, a group of vehicle dynamics simulation tools is developed with two primary goals: to accurately represent vehicle behavior and to provide insight that improves the understanding of vehicle performance. Three tools are developed that focus on tire modeling, vehicle modeling and lap time simulation. Tire modeling is based on Nondimensional Tire Theory, which is extended to provide a flexible model structure that allows arbitrary inputs to be included. For example, rim width is incorporated as a continuous variable in addition to vertical load, inclination angle and inflation pressure. Model order is determined statistically and only significant effects are included. The fitting process is shown to provide satisfactory fits while fit parameters clearly demonstrate characteristic behavior of the tire. To represent the behavior of a complete vehicle, a Nondimensional Tire Model is used, along with a three degree of freedom vehicle model, to create Milliken Moment Diagrams (MMD) at different speeds, longitudinal accelerations, and under various yaw rate conditions. In addition to the normal utility of MMDs for understanding vehicle performance, they are used to develop Limit Acceleration Surfaces that represent the longitudinal, lateral and yaw acceleration limits of the vehicle. Quasi-transient lap time simulation is developed that simulates the performance of a vehicle on a predetermined path based on the Limit Acceleration Surfaces described above. The method improves on the quasi-static simulation method by representing yaw dynamics and indicating the vehicle’s stability and controllability over the lap. -
Chapter 9 – Center of Mass and Linear Momentum I
Chapter 9 – Center of mass and linear momentum I. The center of mass - System of particles / - Solid body II. Newton’s Second law for a system of particles III. Linear Momentum - System of particles / - Conservation IV. Collision and impulse - Single collision / - Series of collisions V. Momentum and kinetic energy in collisions VI. Inelastic collisions in 1D -Completely inelastic collision/ Velocity of COM VII. Elastic collisions in 1D VIII. Collisions in 2D IX. Systems with varying mass X. External forces and internal energy changes I. Center of mass The center of mass of a body or a system of bodies is a point that moves as though all the mass were concentrated there and all external forces were applied there. - System of particles: General: m1x1 m2 x2 m1x1 m2 x2 xcom m1 m2 M M = total mass of the system - The center of mass lies somewhere between the two particles. - Choice of the reference origin is arbitrary Shift of the coordinate system but center of mass is still at the same relative distance from each particle. I. Center of mass - System of particles: m2 xcom d m1 m2 Origin of reference system coincides with m1 3D: 1 n 1 n 1 n xcom mi xi ycom mi yi zcom mi zi M i1 M i1 M i1 1 n rcom miri M i1 - Solid bodies: Continuous distribution of matter. Particles = dm (differential mass elements). 3D: 1 1 1 xcom x dm ycom y dm zcom z dm M M M M = mass of the object M Assumption: Uniform objects uniform density dm dV V 1 1 1 Volume density xcom x dV ycom y dV zcom z dV V V V Linear density: λ = M / L dm = λ dx Surface density: σ = M / A dm = σ dA The center of mass of an object with a point, line or plane of symmetry lies on that point, line or plane. -
Aerodynamic Analysis of the Undertray of Formula 1
Treball de Fi de Grau Grau en Enginyeria en Tecnologies Industrials Aerodynamic analysis of the undertray of Formula 1 MEMORY Autor: Alberto Gómez Blázquez Director: Enric Trillas Gay Convocatòria: Juny 2016 Escola Tècnica Superior d’Enginyeria Industrial de Barcelona Aerodynamic analysis of the undertray of Formula 1 INDEX SUMMARY ................................................................................................................................... 2 GLOSSARY .................................................................................................................................... 3 1. INTRODUCTION .................................................................................................................... 4 1.1 PROJECT ORIGIN ................................................................................................................................ 4 1.2 PROJECT OBJECTIVES .......................................................................................................................... 4 1.3 SCOPE OF THE PROJECT ....................................................................................................................... 5 2. PREVIOUS HISTORY .............................................................................................................. 6 2.1 SINGLE-SEATER COMPONENTS OF FORMULA 1 ........................................................................................ 6 2.1.1 Front wing [3] .......................................................................................................................